An implicitization-based solution to the minimal 4s/6r ToA problem using Cayley--Menger determinants
Pith reviewed 2026-06-26 15:35 UTC · model grok-4.3
The pith
The 4s/6r ToA problem reduces to a 63 by 63 generalized eigenvalue problem after implicitization of Cayley-Menger determinant equations into a 148 by 211 Macaulay matrix.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By parametrizing the 4s/6r ToA problem with Cayley-Menger determinants and applying implicitization, the resulting polynomial system is converted into a 148 by 211 Macaulay matrix whose PLU decomposition yields a 63 by 63 matrix pair that is solved via generalized eigendecomposition to produce up to 38 real solutions.
What carries the argument
The 148 by 211 Macaulay matrix built from the coefficients of the implicitized polynomial system derived from Cayley-Menger determinant equations.
If this is right
- Up to 38 real solutions are obtained for the relative positions of the four senders and six receivers.
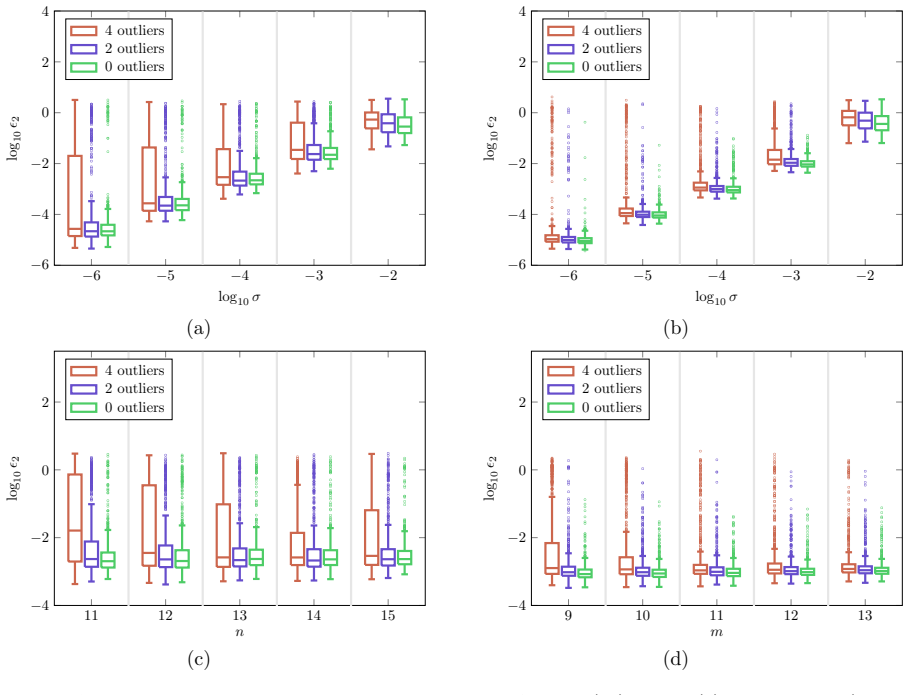
- Numerical accuracy improves by approximately three orders of magnitude over existing methods on noise-free synthetic data.
- Average runtime is 1.3 times faster than the fastest prior algebraic solver.
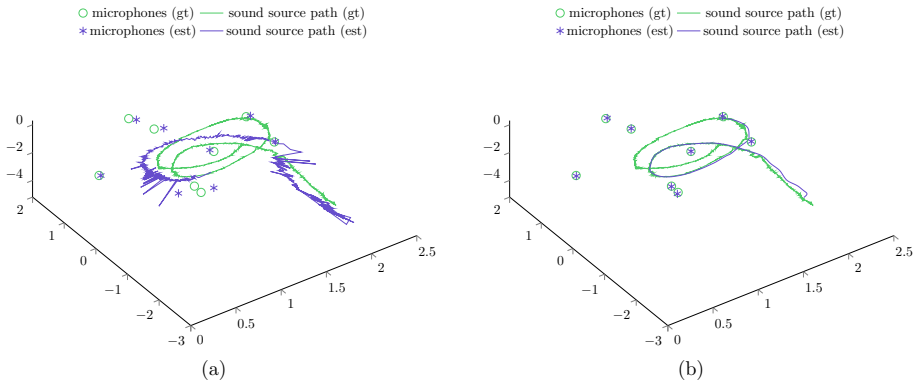
- The output supplies a reliable initial guess when the solver is placed inside a RANSAC loop for real acoustic datasets before bundle adjustment.
Where Pith is reading between the lines
- The same Cayley-Menger plus implicitization pipeline may apply directly to other minimal ToA counts once the appropriate determinant relations are written.
- Higher baseline accuracy could shrink the basin of attraction needed for subsequent nonlinear refinement in deployed systems.
- The approach illustrates how determinant identities can lower the total degree before Macaulay construction in other 3D distance-geometry problems.
Load-bearing premise
The construction of the 148 by 211 Macaulay matrix is assumed to produce a matrix whose kernel dimension and rank properties correctly encode all finite solutions of the 4s/6r problem without introducing extraneous roots or dropping valid ones.
What would settle it
Generate a synthetic 4s/6r instance known to possess exactly 38 real solutions that satisfy the original distance equations; if the solver recovers a different count or returns points that violate the input distances, the completeness claim fails.
Figures


read the original abstract
The paper introduces an efficient algebraic solver for the 4-sender/6-receiver (4s/6r) Time-of-Arrival (ToA) self-localization problem, which involves determining the relative positions of all receivers and senders given their pairwise distance measurements. The problem is addressed through a new parametrization combining Cayley--Menger determinants with an implicitization technique. The proposed algorithm proceeds in three steps. First, a 148 x 211 Macaulay matrix is constructed from the coefficients of the original polynomial system. Second, PLU decomposition of this matrix yields a 63 x 63 matrix pair. Finally, up to 38 real solutions are obtained via generalized eigendecomposition followed by a validation step. Experiments on synthetic noise-free data demonstrate that the proposed solver outperforms existing methods by approximately three orders of magnitude in numerical accuracy while achieving an average runtime of 1.3x faster than the fastest alternative. Experiments on a real-world acoustic dataset confirm that, when integrated within a RANSAC framework, the solver provides a reliable initial guess for bundle adjustment refinement.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes an algebraic solver for the minimal 4-sender/6-receiver ToA self-localization problem. It combines Cayley-Menger determinants with an implicitization technique to generate a polynomial system, constructs a 148×211 Macaulay matrix from its coefficients, applies PLU decomposition to obtain a 63×63 matrix pair, and extracts up to 38 real solutions via generalized eigendecomposition followed by validation. On noise-free synthetic data the solver is reported to achieve approximately three orders of magnitude higher numerical accuracy than existing methods while running 1.3× faster than the fastest alternative; real acoustic data experiments show it supplies reliable initial guesses inside a RANSAC+bundle-adjustment pipeline.
Significance. If the Macaulay-matrix construction is shown to recover the complete finite solution set of the 4s/6r problem, the work would supply a useful, high-accuracy minimal solver for distance-based localization. The combination of Cayley-Menger implicitization with a structured Macaulay reduction is a technically interesting route that could be reused for other minimal ToA or distance-geometry problems; the reported runtime and accuracy figures, if verified, would make the solver attractive as a RANSAC primitive.
major comments (1)
- [Abstract; solver-construction section describing the 148×211 Macaulay matrix] The central numerical claims rest on the 148×211 Macaulay matrix (described in the abstract and the solver-construction section) correctly encoding all finite solutions of the 4s/6r system. No independent verification—Gröbner basis, resultant, or known Bézout number for the implicitized Cayley-Menger ideal—is supplied to confirm that the kernel dimension after PLU reduction yields exactly the expected solution count without omissions or extraneous roots. This verification is load-bearing for the three-order-of-magnitude accuracy claim on synthetic data.
minor comments (1)
- [Abstract] The abstract states that “up to 38 real solutions” are obtained but does not report the total number of complex solutions or the degree of the ideal; adding this information would clarify the completeness of the root finder.
Simulated Author's Rebuttal
We thank the referee for their careful review and constructive feedback. We address the major comment below and will revise the manuscript to incorporate additional verification as requested.
read point-by-point responses
-
Referee: [Abstract; solver-construction section describing the 148×211 Macaulay matrix] The central numerical claims rest on the 148×211 Macaulay matrix (described in the abstract and the solver-construction section) correctly encoding all finite solutions of the 4s/6r system. No independent verification—Gröbner basis, resultant, or known Bézout number for the implicitized Cayley-Menger ideal—is supplied to confirm that the kernel dimension after PLU reduction yields exactly the expected solution count without omissions or extraneous roots. This verification is load-bearing for the three-order-of-magnitude accuracy claim on synthetic data.
Authors: We acknowledge that the manuscript does not include an independent verification such as a Gröbner basis computation or the Bézout number of the implicitized ideal. The 148×211 Macaulay matrix arises directly from the chosen monomial basis after implicitization of the Cayley-Menger system, and the subsequent PLU reduction to a 63×63 eigenproblem is sized according to the expected corank. The maximum of 38 real solutions is the largest number recovered across our synthetic experiments, and the reported accuracy improvement is measured against prior solvers on the same instances. To rigorously confirm completeness, we will add a verification subsection in the revision that computes a Gröbner basis for a generic instance of the ideal and reports the resulting solution count and degree. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper describes an explicit algebraic construction: Cayley-Menger determinants are used to form a polynomial system, which is then implicitized into a 148×211 Macaulay matrix whose kernel is reduced via PLU and solved by generalized eigendecomposition. No step equates a claimed output to an input by definition, renames a fitted parameter as a prediction, or relies on a load-bearing self-citation whose own justification is internal to the present work. The reported accuracy on noise-free synthetic data is obtained by direct comparison against known ground-truth solutions rather than by any internal fitting or tautological validation. The derivation therefore remains self-contained and independent of the target result.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The Cayley-Menger determinant correctly encodes the volume constraints implied by the distance measurements in the 4s/6r configuration.
- domain assumption The 148 x 211 Macaulay matrix constructed from the coefficient ideal has the expected rank and kernel dimension that isolates the finite solutions.
Reference graph
Works this paper leans on
-
[1]
Berger, M
M. Berger, M. Cole, and S. Levy.Geometry I. Universitext. Springer Berlin Heidelberg, 2009
2009
-
[2]
A sparse resultant based method for efficient minimal solvers
Snehal Bhayani, Zuzana Kukelova, and Janne Heikkila. A sparse resultant based method for efficient minimal solvers. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 1770–1779, 2020. 8 0 0.5 1 1.5 2 2.5 −3 −2 −1 0 1 2 −4 −2 0 microphones (gt)sound source path (gt) microphones (est)sound source path (est) 0 0.5 1 1....
2020
-
[3]
Fast and stable polynomial equation solving and its application to computer vision.International Journal of Computer Vision, 84(3):237–256, 2009
Martin Byr¨ od, Klas Josephson, and Kalle ˚Astr¨ om. Fast and stable polynomial equation solving and its application to computer vision.International Journal of Computer Vision, 84(3):237–256, 2009
2009
-
[4]
Underwater vehicle positioning based on time of arrival measurements from a single beacon
Thomas Casey, Brian Guimond, and James Hu. Underwater vehicle positioning based on time of arrival measurements from a single beacon. InOCEANS 2007, pages 1–8. IEEE, 2007
2007
-
[5]
A survey of robot swarms’ relative localization method.Sensors, 22(12):4424, 2022
Siyuan Chen, Dong Yin, and Yifeng Niu. A survey of robot swarms’ relative localization method.Sensors, 22(12):4424, 2022
2022
-
[6]
Self-calibration of microphone arrays from measurement of times of arrival of acoustic signals
Alessio Contini, Antonio Canclini, Fabio Antonacci, Marco Compagnoni, Augusto Sarti, and Stefano Tubaro. Self-calibration of microphone arrays from measurement of times of arrival of acoustic signals. In 2012 5th International Symposium on Communications, Control and Signal Processing, pages 1–6. IEEE, 2012
2012
-
[7]
Cox, John Little, and Donald O’Shea.Ideals, varieties, and algorithms: An introduction to computational algebraic geometry and commutative algebra
David A. Cox, John Little, and Donald O’Shea.Ideals, varieties, and algorithms: An introduction to computational algebraic geometry and commutative algebra. Springer, 2015
2015
-
[8]
A closed form solution to the microphone position self-calibration problem
Marco Crocco, Alessio Del Bue, Matteo Bustreo, and Vittorio Murino. A closed form solution to the microphone position self-calibration problem. In2012 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), pages 2597–2600. IEEE, 2012
2012
-
[9]
Synchronous-clock, one-way-travel-time acous- tic navigation for underwater vehicles.Journal of Field Robotics, 28(1):121–136, 2011
Ryan M Eustice, Hanumant Singh, and Louis L Whitcomb. Synchronous-clock, one-way-travel-time acous- tic navigation for underwater vehicles.Journal of Field Robotics, 28(1):121–136, 2011
2011
-
[10]
Experimental results in synchronous-clock one-way-travel-time acoustic navigation for autonomous underwater vehicles
Ryan M Eustice, Louis L Whitcomb, Hanumant Singh, and Matthew Grund. Experimental results in synchronous-clock one-way-travel-time acoustic navigation for autonomous underwater vehicles. InPro- ceedings 2007 IEEE International Conference on Robotics and Automation, pages 4257–4264. IEEE, 2007
2007
-
[11]
Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography.Communications of the ACM, 24(6):381–395, 1981
Martin A Fischler and Robert C Bolles. Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography.Communications of the ACM, 24(6):381–395, 1981
1981
-
[12]
Gaubitch, W
Nikolay D. Gaubitch, W. Bastiaan Kleijn, and Richard Heusdens. Auto-localization in ad-hoc microphone arrays. InIEEE International Conference on Acoustics, Speech and Signal Processing, ICASSP 2013, Vancouver, BC, Canada, May 26-31, 2013, pages 106–110. IEEE, 2013
2013
-
[13]
Grayson and M
D. Grayson and M. Stillman. Macaulay2, a software system for research in algebraic geometry, 2002. available athttp://www.math.uiuc.edu/Macaulay2/
2002
-
[14]
Localization algorithms of underwater wireless sensor networks: A survey.Sensors, 12(2):2026–2061, 2012
Guangjie Han, Jinfang Jiang, Lei Shu, Yongjun Xu, and Feng Wang. Localization algorithms of underwater wireless sensor networks: A survey.Sensors, 12(2):2026–2061, 2012
2026
-
[15]
CRLB for TOA based near-ground swarm robotic localization
Zhishuai Han, Jie He, Yishuang Geng, Cheng Xu, Liyuan Xu, and Shihong Duan. CRLB for TOA based near-ground swarm robotic localization. In2015 IEEE 12th Intl Conf on Ubiquitous Intelligence and Computing and 2015 IEEE 12th Intl Conf on Autonomic and Trusted Computing and 2015 IEEE 15th Intl Conf on Scalable Computing and Communications and Its Associated W...
2015
-
[16]
Hybrid ultrasound-RFID indoor positioning: Combining the best of both worlds
Sverre Holm. Hybrid ultrasound-RFID indoor positioning: Combining the best of both worlds. In2009 IEEE International Conference on RFID, pages 155–162. IEEE, 2009
2009
-
[17]
The indoor localization and tracking estimation method of mobile targets in three-dimensional wireless sensor networks.Sensors, 15(11):29661– 29684, 2015
Zixi Jia, Chengdong Wu, Zhao Li, Yunzhou Zhang, and Bo Guan. The indoor localization and tracking estimation method of mobile targets in three-dimensional wireless sensor networks.Sensors, 15(11):29661– 29684, 2015
2015
-
[18]
A complete characterization and solution to the microphone position self-calibration problem
Yubin Kuang, Simon Burgess, Anna Torstensson, and Kalle ˚Astr¨ om. A complete characterization and solution to the microphone position self-calibration problem. In2013 IEEE International Conference on Acoustics, Speech and Signal Processing, pages 3875–3879. IEEE, 2013
2013
-
[19]
Automatic generator of minimal problem solvers
Zuzana Kukelova, Martin Bujnak, and Tomas Pajdla. Automatic generator of minimal problem solvers. In European Conference on Computer Vision, pages 302–315. Springer, 2008
2008
-
[20]
Upgrade methods for stratified sensor network self-calibration
Martin Larsson, Gabrielle Flood, Magnus Oskarsson, and Kalle ˚Astr¨ om. Upgrade methods for stratified sensor network self-calibration. InICASSP 2020-2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), pages 4851–4855. IEEE, 2020
2020
-
[21]
Efficient solvers for minimal problems by syzygy- based reduction
Viktor Larsson, Kalle ˚Astr¨ om, and Magnus Oskarsson. Efficient solvers for minimal problems by syzygy- based reduction. InProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages 820–829, 2017
2017
-
[22]
Polynomial solvers for saturated ideals
Viktor Larsson, Kalle ˚Astr¨ om, and Magnus Oskarsson. Polynomial solvers for saturated ideals. InProceed- ings of the IEEE International Conference on Computer Vision, pages 2288–2297, 2017
2017
-
[23]
Beyond Gr¨ obner bases: Basis selection for minimal solvers
Viktor Larsson, Magnus Oskarsson, Kalle ˚Astr¨ om, Alge Wallis, Zuzana Kukelova, and Tomas Pajdla. Beyond Gr¨ obner bases: Basis selection for minimal solvers. InProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages 3945–3954, 2018
2018
-
[24]
A survey on indoor positioning systems
Luca Mainetti, Luigi Patrono, and Ilaria Sergi. A survey on indoor positioning systems. In2014 22nd international conference on software, telecommunications and computer networks (SoftCOM), pages 111–
-
[25]
Forward kinematics of a general Stewart–Gough platform by elimination templates
Evgeniy Martyushev. Forward kinematics of a general Stewart–Gough platform by elimination templates. Mechanism and Machine Theory, 215:106170, 2025
2025
-
[26]
Automatic solver generator for systems of Laurent polynomial equations.International Journal of Computer Vision, 134:59, 2026
Evgeniy Martyushev, Snehal Bhayani, and Tomas Pajdla. Automatic solver generator for systems of Laurent polynomial equations.International Journal of Computer Vision, 134:59, 2026
2026
-
[27]
Optimizing elimination templates by greedy pa- rameter search
Evgeniy Martyushev, Jana Vrablikova, and Tomas Pajdla. Optimizing elimination templates by greedy pa- rameter search. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 15754–15764, 2022
2022
-
[28]
A state-of-the-art survey of indoor positioning and navigation systems and technologies.South African Computer Journal, 29(3):145–197, 2017
Wilson Sakpere, Michael Adeyeye-Oshin, and Nhlanhla BW Mlitwa. A state-of-the-art survey of indoor positioning and navigation systems and technologies.South African Computer Journal, 29(3):145–197, 2017
2017
-
[29]
The role of time in a robotic swarm: A joint view on communications, localization, and sensing.IEEE Communications Magazine, 59(2):98–104, 2021
Emanuel Staudinger, Siwei Zhang, Robert P¨ ohlmann, and Armin Dammann. The role of time in a robotic swarm: A joint view on communications, localization, and sensing.IEEE Communications Magazine, 59(2):98–104, 2021
2021
-
[30]
PhD thesis, Lund University, Sweden, 2005
Henrik Stew´ enius.Gr¨ obner basis methods for minimal problems in computer vision. PhD thesis, Lund University, Sweden, 2005
2005
-
[31]
ToA-TS: Time of arrival based joint time synchronization and tracking for mobile underwater systems.Ad hoc networks, 34:211–223, 2015
Jinwang Yi, Diba Mirza, Ryan Kastner, Curt Schurgers, Paul Roberts, and Jules Jaffe. ToA-TS: Time of arrival based joint time synchronization and tracking for mobile underwater systems.Ad hoc networks, 34:211–223, 2015
2015
-
[32]
A survey of indoor localization systems and tech- nologies.IEEE Communications Surveys & Tutorials, 21(3):2568–2599, 2019
Faheem Zafari, Athanasios Gkelias, and Kin K Leung. A survey of indoor localization systems and tech- nologies.IEEE Communications Surveys & Tutorials, 21(3):2568–2599, 2019
2019
-
[33]
TOA-based self-calibration of dual-microphone array.IEEE Journal of Selected Topics in Signal Processing, 9(5):791–801, 2015
Simayijiang Zhayida, Simon Burgess, Yubin Kuang, and Kalle ˚Astr¨ om. TOA-based self-calibration of dual-microphone array.IEEE Journal of Selected Topics in Signal Processing, 9(5):791–801, 2015
2015
-
[34]
Simayijiang Zhayida, Simon Segerblom Rex, Yubin Kuang, Fredrik Andersson, and Kalle ˚Astr¨ om. An automatic system for acoustic microphone geometry calibration based on minimal solvers.arXiv preprint arXiv:1610.02392, 2016. 10
Pith/arXiv arXiv 2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.