Local Conformity-Based Evolutionary Game Modeling of UAV Swarm Under Byzantine Attack
Pith reviewed 2026-06-26 13:41 UTC · model grok-4.3
The pith
Local conformity spreads deceptive strategies in UAV swarms under Byzantine attacks via evolutionary game dynamics.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper establishes that local conformity rules, implemented through graph evolutionary game theory with death-birth updating, govern the propagation of deceptive strategies in UAV swarms under Byzantine attacks. The macroscopic dynamic equation for the fraction of deceptive strategies admits analytical evolutionary stable states. Observation errors weaken malicious induction, whereas higher proportions of malicious nodes and greater attack intensity amplify attack impacts, and the model exhibits strong topological robustness across regular, scale-free, and random networks.
What carries the argument
death-birth updating rules in a graph evolutionary game on the UAV communication network
If this is right
- The fraction of deceptive strategies obeys a differential equation whose equilibria depend explicitly on the fraction of malicious nodes and attack intensity.
- Observation errors reduce the equilibrium fraction of deceptive strategies, thereby limiting the effectiveness of Byzantine attacks.
- Higher malicious-node density and stronger attacks drive the system toward higher stable fractions of deception.
- The location and stability of the equilibria remain unchanged when the underlying interaction network is switched among regular, scale-free, and random topologies.
Where Pith is reading between the lines
- The analytical stable-state expressions could be used to set intervention thresholds for UAV operators when the deceptive fraction approaches critical values.
- Because the dynamics prove insensitive to network type, mitigation techniques need not be redesigned for each possible swarm topology.
- Allowing conformity strength to vary with mission phase might reveal parameter regimes in which attacks fail to reach high stable fractions.
Load-bearing premise
Local conformity rules, implemented through graph evolutionary game theory and death-birth updating, accurately capture how UAVs adopt deceptive strategies under Byzantine attacks.
What would settle it
Simulating the death-birth process on a small network with known attack parameters and checking whether the measured fraction of deceptive strategies follows the derived dynamic equation and reaches the predicted stable states would test the model; systematic mismatch would falsify the central claim.
Figures
read the original abstract
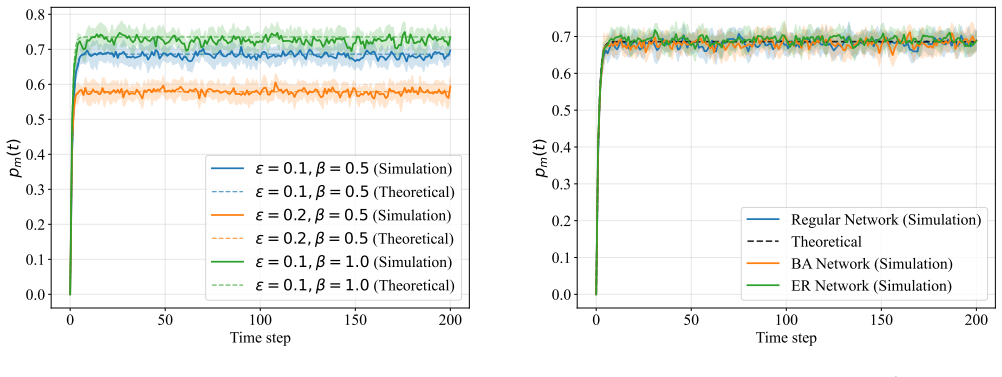
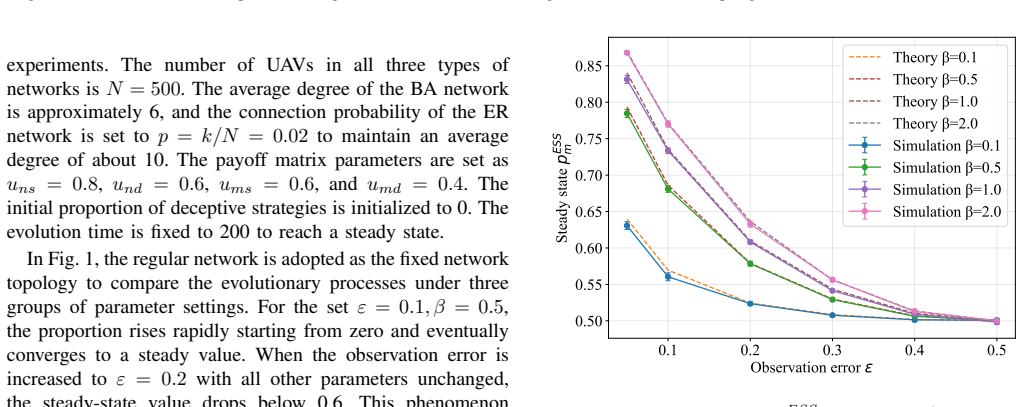
Leveraging their flexible and efficient deployment capabilities, unmanned aerial vehicle (UAV) swarms have been widely applied in various mission scenarios. However, the open communication environment also exposes them to the threat of Byzantine attacks. Most existing studies assume independent decision-making by each UAV, neglecting that local conformity amplifies false information propagation. This paper constructs an evolutionary game model for UAV swarm under malicious attacks based on graph evolutionary game theory, revealing how local conformity rules govern the spread of deceptive strategies. Using death-birth updating rules, we derive the macroscopic dynamic equation for the fraction of deceptive strategies and the analytical solutions to its evolutionary stable states. Sim ulations reveal observation errors weaken malicious induction, while higher proportions of malicious nodes and greater attack intensity drastically amplify attack impacts. Moreover, the model exhibits strong topological robustness across regular, scale-free and random networks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper constructs an evolutionary game model of UAV swarms under Byzantine attacks using graph evolutionary game theory. It incorporates local conformity and death-birth updating to derive a macroscopic dynamic equation governing the fraction of deceptive strategies together with closed-form solutions for the evolutionary stable states. Simulations are used to examine the effects of observation errors, malicious-node fraction, attack intensity, and network topology (regular, scale-free, random) on strategy spread.
Significance. If the derivation is exact, the work supplies an analytically tractable model linking local conformity rules to macroscopic deception dynamics in attacked UAV networks, with potential value for security analysis of multi-agent systems on graphs.
major comments (2)
- [derivation of macroscopic dynamic equation] The central derivation replaces local neighborhood averages with global fractions to obtain a closed macroscopic equation from death-birth updating. On scale-free networks this step is not shown to remain exact once degree heterogeneity is present; standard pair or mean-field closures introduce higher-order correction terms that are omitted here. Consequently the reported analytical stable states and the claim of strong topological robustness on scale-free graphs rest on an unverified approximation (see the derivation following the statement of the death-birth rule and the subsequent stability analysis).
- [simulation results] The abstract asserts that simulations confirm the analytical solutions across topologies, yet no parameter values, network-generation details, or quantitative comparison between the closed-form equilibria and the simulated trajectories are supplied. Without these, it is impossible to assess whether the reported robustness holds beyond the mean-field regime.
minor comments (1)
- [abstract] Abstract contains the typographical error "Sim ulations".
Simulated Author's Rebuttal
Thank you for the opportunity to respond to the referee's comments. We address each major point below and propose revisions where appropriate to strengthen the manuscript.
read point-by-point responses
-
Referee: [derivation of macroscopic dynamic equation] The central derivation replaces local neighborhood averages with global fractions to obtain a closed macroscopic equation from death-birth updating. On scale-free networks this step is not shown to remain exact once degree heterogeneity is present; standard pair or mean-field closures introduce higher-order correction terms that are omitted here. Consequently the reported analytical stable states and the claim of strong topological robustness on scale-free graphs rest on an unverified approximation (see the derivation following the statement of the death-birth rule and the subsequent stability analysis).
Authors: The derivation follows the standard mean-field approach commonly used in evolutionary game theory on graphs to close the system by approximating local frequencies with global ones. This yields the macroscopic equation and closed-form ESS. While degree heterogeneity on scale-free networks can introduce corrections, our simulations demonstrate that the analytical predictions match well even on scale-free topologies, supporting the robustness claim. We will add a paragraph discussing the approximation's validity and limitations in the revised manuscript. revision: partial
-
Referee: [simulation results] The abstract asserts that simulations confirm the analytical solutions across topologies, yet no parameter values, network-generation details, or quantitative comparison between the closed-form equilibria and the simulated trajectories are supplied. Without these, it is impossible to assess whether the reported robustness holds beyond the mean-field regime.
Authors: We will revise the manuscript to include detailed simulation parameters (e.g., network sizes, generation algorithms such as Watts-Strogatz for regular, Barabási–Albert for scale-free with specific parameters, Erdős–Rényi for random), initial conditions, and quantitative metrics (e.g., mean squared error between analytical equilibria and averaged simulation results over multiple runs) to allow verification of the agreement across topologies. revision: yes
Circularity Check
No circularity: derivation from death-birth rules is independent of target results
full rationale
The abstract and provided text describe a standard construction of an evolutionary game model on graphs using death-birth updating to obtain a macroscopic dynamic equation and its stable states. No quoted step reduces the claimed predictions or stable-state solutions to fitted parameters, self-referential definitions, or load-bearing self-citations. The derivation is presented as following directly from the updating rule and graph structure; simulations are reported separately as validation. This is self-contained against external benchmarks in evolutionary game theory and does not exhibit any of the enumerated circular patterns.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Graph evolutionary game theory with death-birth updating accurately models UAV strategy adoption under attacks
- domain assumption Local conformity governs the spread of deceptive strategies in the swarm
Reference graph
Works this paper leans on
-
[1]
R. Ren, J. Zhao and Q. Zhang, ”UA V-Assisted Collaborative Sensing Task Offloading and Resource Allocation in IoV ,” IEEE Transactions on Vehicular Technology, vol. 75, no. 4, pp. 6806-6815, Apr. 2026
2026
-
[2]
J. Zhao, F. Huang, L. Liao and Q. Zhang, ”Blockchain-Based Trust Management Model for Vehicular Ad Hoc Networks,” IEEE Internet of Things Journal, vol. 11, no. 5, pp. 8118-8132, Mar. 2024
2024
-
[3]
X. Wang, Z. Zhao, et al. ”A survey on security of UA V swarm networks: attacks and countermeasures,” ACM Computing Surveys, vol. 57, no. 3, pp. 1-37, Nov. 2024
2024
-
[4]
R. Ren, J. Zhao and Q. Zhang, ”Integrated sensing and communication for low-altitude security,” Physical Communication, vol. 76, pp. 103117, Apr. 2026
2026
-
[5]
S. Hu, Z. Zhou, P. Wang and Y . Zhang, ”A Hierarchical Cooperative Au- thentication Protocol for Attack-Resilient UA V Swarms With Ultra-Low Overhead,” IEEE Transactions on Information Forensics and Security, vol. 20, pp. 12652-12664, Nov. 2025
2025
-
[6]
Q. Wu, Y . Zhang, Z. Yang and M. R. Shikh-Bahaei, ”Deep Learning for Secure UA V Swarm Communication Under Malicious Attacks,” IEEE Transactions on Wireless Communications, vol. 23, no. 10, pp. 14879- 14894, Oct. 2024
2024
-
[7]
Y . Wu, X. Guan, W. Yang and Q. Wu, ”UA V Swarm Communication Under Malicious Jamming: Joint Trajectory and Clustering Design,” IEEE Wireless Communications Letters, vol. 10, no. 10, pp. 2264-2268, Oct. 2021
2021
-
[8]
C. Zhu, B. Jiang, et al., ”Privacy-Preserving Average Consensus for Swarm Systems Subject to DoS Attacks,” IEEE Internet of Things Journal, vol. 12, no. 24, pp. 53659-53669, 15 Dec. 2025
2025
-
[9]
Gong, et al., ”Resilient Human-in-the-Loop Formation-Tracking of Multi-UA V Systems Against Byzantine Attacks,” IEEE Transactions on Automation Science and Engineering, vol
X. Gong, et al., ”Resilient Human-in-the-Loop Formation-Tracking of Multi-UA V Systems Against Byzantine Attacks,” IEEE Transactions on Automation Science and Engineering, vol. 22, pp. 3797-3809, 2025
2025
-
[10]
J. Zhao, R. Ren, Y . Nie and D. Wang, ”Decision Intelligence Em- powering Resource Management for 6G-V2X Communications,” IEEE Internet of Things Magazine, vol. 8, no. 6, pp. 88-96, Nov. 2025
2025
-
[11]
Zhao, et al., ”A UA V-Aided Vehicular Integrated Platooning Network for Heterogeneous Resource Management,” IEEE Transactions on Green Communications and Networking, vol
J. Zhao, et al., ”A UA V-Aided Vehicular Integrated Platooning Network for Heterogeneous Resource Management,” IEEE Transactions on Green Communications and Networking, vol. 7, no. 1, pp. 512-521, Mar. 2023
2023
-
[12]
Huang, B
R. Huang, B. Li, et al. ”Dual-feature-driven nonlinear evolution of social misinformation,” International Journal of Swarm Intelligence Research, vol. 16, no.1, Feb. 2025
2025
-
[13]
C. Wu, H. Deng, et al. ”Enhancing resilience of unmanned autonomous swarms through game theory-based cooperative reconfiguration”, Reli- ability Engineering & System Safety, vol. 260, pp. 110951, Aug. 2025
2025
-
[14]
The replicator equation on graphs
Ohtsuki H, Nowak M A. The replicator equation on graphs. Journal of Theoretical Biology, 2006, 243(1): 86–97
2006
-
[15]
Lin, ”Analysis of public opinion security based on bounded rational behaviors in social network,” Ph.D
Y . Lin, ”Analysis of public opinion security based on bounded rational behaviors in social network,” Ph.D. dissertation, Tsinghua University, Beijing, China, 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.