Offline Reinforcement Learning for Warehouse SLAM Throughput Control
Pith reviewed 2026-06-26 08:36 UTC · model grok-4.3
The pith
Offline RL with CQL improves warehouse SLAM system health by 22.97% and cuts throttling by 3.18%.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We present an offline RL framework for optimizing SLAM throughput control in a warehouse fulfillment environment that uses a history-informed state representation, action space abstraction for delayed-impact control, and a reward function capturing both upstream and downstream operational metrics. The framework is algorithm-agnostic and is instantiated with three state-of-the-art offline RL algorithms trained on de-identified historical operational logs. The CQL policy consistently outperforms alternatives, improving system health by 22.97% and reducing average throttling duration by 3.18%.
What carries the argument
Offline RL framework with history-informed state representation, action space abstraction for delayed effects, and reward function balancing upstream and downstream metrics.
If this is right
- The CQL policy improves system health by 22.97%.
- The CQL policy reduces average throttling duration by 3.18%.
- Multiple offline RL algorithms can be integrated under the same unified architecture.
- Policy performance can be assessed with immediate reward regression, long-horizon FQE, and model-based Deep Koopman dynamics.
Where Pith is reading between the lines
- The method could enable throughput optimization in live warehouse systems where online learning risks operational disruption.
- Similar offline RL structures may transfer to other logistics control tasks that involve delayed feedback.
- The reported gains rest on the assumption that the collected logs contain all relevant state variables and that no major changes occur in the physical system after training.
Load-bearing premise
Historical operational logs are representative of future system dynamics and the reward function accurately captures the trade-off between throughput and downstream stability.
What would settle it
Deploy the CQL policy in the live warehouse and measure whether system health rises by approximately 23% and average throttling duration falls by approximately 3% over a sustained period compared with the baseline.
Figures

read the original abstract
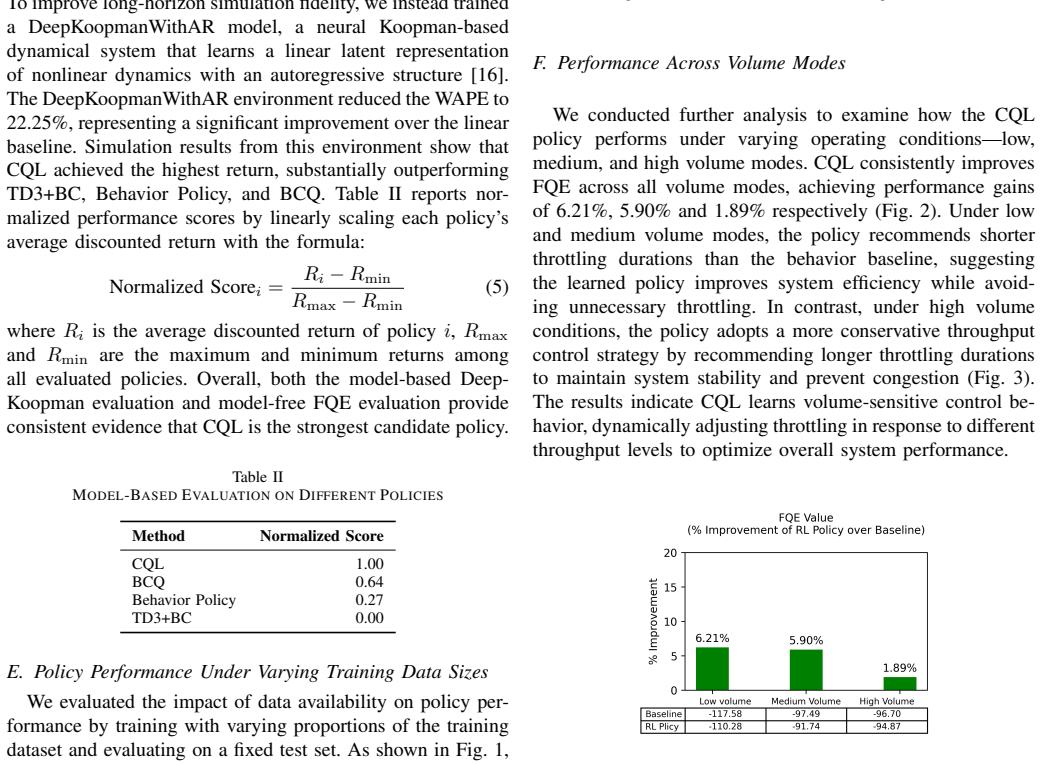
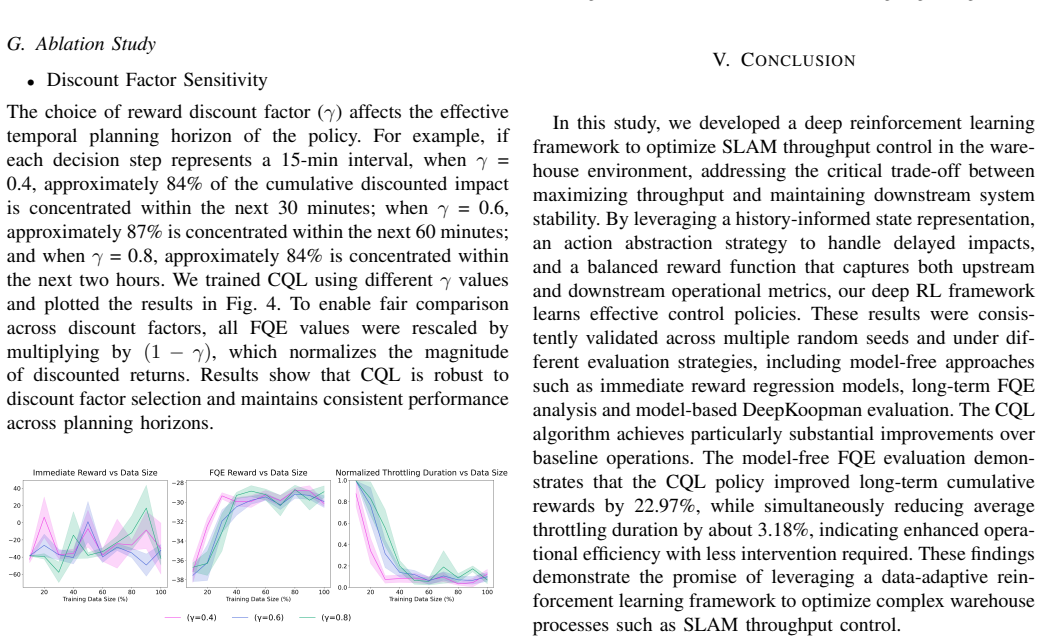
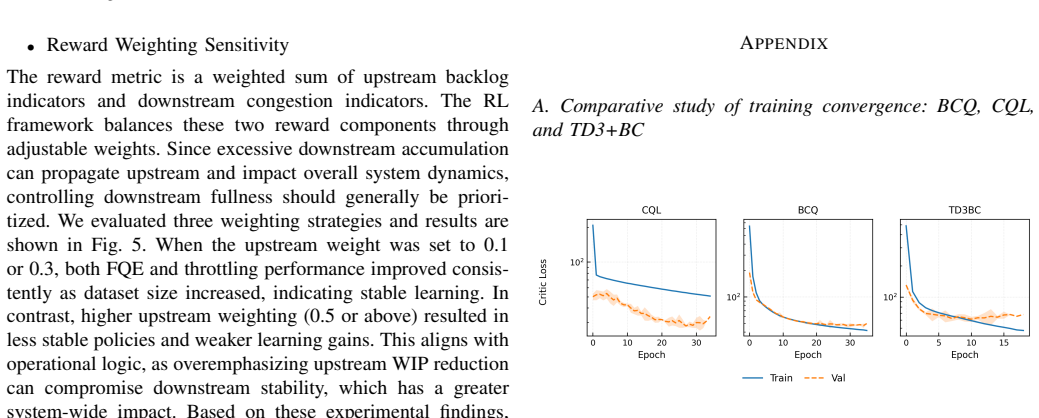
We present an offline reinforcement learning (RL) framework for optimizing SLAM throughput control in a warehouse fulfillment environment. SLAM (Scan/Label/Apply/Manifest) throughput directly influences system congestion and operational efficiency. Our RL-based control approach dynamically recommends SLAM throughput settings that adaptively balance throughput maximization with downstream stability through intelligent adjustment of throttling behavior. We include a history-informed state representation, action space abstraction for delayed-impact control, and a reward function that captures both upstream and downstream operational metrics. Our approach is algorithm-agnostic, enabling integration of multiple offline RL methods under a unified architecture. We instantiate our framework with three state-of-the-art offline RL algorithms, and trained the models offline using de-identified historical operational logs from a large-scale warehouse. Policy performance is evaluated using a comprehensive multi-method strategy. These include model-free approaches including immediate reward estimation via regression models and long-horizon Fitted Q Evaluation (FQE), as well as model-based Deep Koopman dynamics evaluation. Empirical results reveal that the CQL policy consistently outperforms alternatives, improving system health by 22.97% and reducing average throttling duration by 3.18%. These findings demonstrate the potential of offline RL for safe and scalable warehouse throughput control optimization.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces an offline RL framework for SLAM throughput control in warehouses. It uses history-informed states, abstracted actions for delayed effects, and a reward capturing upstream/downstream metrics. Models (including CQL) are trained on de-identified historical logs; evaluation combines regression-based immediate rewards, Fitted Q Evaluation, and Deep Koopman dynamics. The central empirical claim is that CQL outperforms baselines, improving system health by 22.97% and reducing average throttling duration by 3.18%.
Significance. If the performance gains are shown to be robust and non-circular, the work would demonstrate a practical application of offline RL to a real logistics control problem with safety constraints. The multi-method evaluation strategy and algorithm-agnostic architecture are positive features that could support broader adoption in industrial settings.
major comments (2)
- [Abstract] Abstract: The reported 22.97% system-health improvement and 3.18% throttling reduction are presented without any information on data volume, number of evaluation episodes, statistical significance tests, hyperparameter selection procedure, or the precise definition and computation of 'system health.' These omissions make the central empirical claim unverifiable from the provided text.
- [Abstract] Abstract (evaluation paragraph): The multi-method evaluation relies on regression models and FQE trained on the same historical logs used for policy training. No analysis is supplied to quantify or bound potential circularity between the fitted dynamics and the reported policy gains.
minor comments (1)
- [Abstract] Abstract: The phrase 'improving system health by 22.97%' is used without an explicit definition of the metric or its relation to the reward function components.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback. We address each major comment below and indicate the planned revisions.
read point-by-point responses
-
Referee: [Abstract] Abstract: The reported 22.97% system-health improvement and 3.18% throttling reduction are presented without any information on data volume, number of evaluation episodes, statistical significance tests, hyperparameter selection procedure, or the precise definition and computation of 'system health.' These omissions make the central empirical claim unverifiable from the provided text.
Authors: We agree that the abstract, due to length constraints, omits supporting details that would make the claims more self-contained. The body of the manuscript defines system health as a composite of upstream and downstream operational metrics (Section 3), describes the de-identified historical logs and their scale (Section 4.1), outlines the multi-method evaluation including episode counts and regression/FQE/Koopman procedures (Section 5), and details hyperparameter selection (Appendix B). Statistical significance is assessed via repeated independent runs with variance reported. We will revise the abstract to include a concise definition of system health and a note on evaluation scale. revision: yes
-
Referee: [Abstract] Abstract (evaluation paragraph): The multi-method evaluation relies on regression models and FQE trained on the same historical logs used for policy training. No analysis is supplied to quantify or bound potential circularity between the fitted dynamics and the reported policy gains.
Authors: This concern about possible circularity is valid. Although the offline policies and the evaluators are trained separately, the manuscript does not provide an explicit quantification of overlap or bias bounds. We will add a dedicated paragraph in the evaluation section that analyzes this issue, for instance by reporting evaluator performance on temporally held-out log segments and by describing any cross-validation steps used during fitting. revision: yes
Circularity Check
No significant circularity identified
full rationale
The paper presents a standard offline RL pipeline: policies are trained on historical logs and evaluated via regression-based reward estimation, FQE, and Koopman dynamics also derived from the same logs. No equations, self-citations, or steps are shown that reduce any claimed performance gain (e.g., the 22.97% system-health improvement) to a fitted input or definition by construction. The multi-method evaluation on the training distribution is the conventional offline-RL protocol and remains self-contained against external benchmarks; no load-bearing derivation collapses to its own inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Scalable multi-agent reinforcement learning for warehouse logistics with robotic and human co-workers,
A. Krnjaic, R. D. Steleac, J. D. Thomas, G. Papoudakis, L. Sch ¨afer, A. W. K. To, K.-H. Lao, M. Cubuktepe, M. Haley, P. B¨orsting, and S. V . Albrecht, “Scalable multi-agent reinforcement learning for warehouse logistics with robotic and human co-workers,” inIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
2024
-
[2]
Storehouse: a reinforcement learning environment for optimizing warehouse manage- ment,
J. Cestero, M. Quartulli, A. M. Metelli, and M. Restelli, “Storehouse: a reinforcement learning environment for optimizing warehouse manage- ment,” inInternational Joint Conference on Neural Networks (IJCNN), 2022
2022
-
[3]
Manufacturing dispatching using reinforcement and transfer learning,
S. Zheng, C. Gupta, and S. Serita, “Manufacturing dispatching using reinforcement and transfer learning,” inEuropean Conference on Ma- chine Learning and Principles and Practice of Knowledge Discovery in Databases, 2019
2019
-
[4]
Solving the order batching and sequencing problem using deep reinforcement learning,
B. Cals, Y . Zhang, R. Dijkman, and C. van Dorst, “Solving the order batching and sequencing problem using deep reinforcement learning,” Computers & Industrial Engineering, 2020
2020
-
[5]
Stabilizing off- policy q-learning via bootstrapping error reduction,
A. Kumar, J. Fu, M. Soh, G. Tucker, and S. Levine, “Stabilizing off- policy q-learning via bootstrapping error reduction,” inAdvances in Neural Information Processing Systems, 2019
2019
-
[6]
Behavior regularized offline reinforcement learning,
Y . Wu, G. Tucker, and O. Nachum, “Behavior regularized offline reinforcement learning,”arXiv preprint arXiv:1911.11361, 2019
Pith/arXiv arXiv 1911
-
[7]
An optimistic perspec- tive on offline reinforcement learning,
R. Agarwal, D. Schuurmans, and M. Norouzi, “An optimistic perspec- tive on offline reinforcement learning,” inInternational Conference on Machine Learning, 2020
2020
-
[8]
Morel: Model-based offline reinforcement learning,
R. Kidambi, A. Rajeswaran, P. Netrapalli, and T. Joachims, “Morel: Model-based offline reinforcement learning,” inAdvances in Neural Information Processing Systems, 2020
2020
-
[9]
Keep doing what worked: Behavioral modelling priors for offline reinforcement learning,
N. Siegel, J. T. Springenberg, F. Berkenkamp, A. Abdolmaleki, M. Ne- unert, T. Lampe, R. Hafner, and M. Riedmiller, “Keep doing what worked: Behavioral modelling priors for offline reinforcement learning,” inInternational Conference on Learning Representations, 2020
2020
-
[10]
Offline reinforcement learning: Tutorial, review, and perspectives on open problems,
S. Levine, A. Kumar, G. Tucker, and J. Fu, “Offline reinforcement learning: Tutorial, review, and perspectives on open problems,”arXiv preprint arXiv:2005.01643, 2020
Pith/arXiv arXiv 2005
-
[11]
Off-policy deep reinforcement learning without exploration,
S. Fujimoto, D. Meger, and D. Precup, “Off-policy deep reinforcement learning without exploration,” inInternational Conference on Machine Learning, ser. PMLR, vol. 97, 2019, pp. 2052–2062
2019
-
[12]
Conservative q-learning for offline reinforcement learning,
A. Kumar, A. Zhou, G. Tucker, and S. Levine, “Conservative q-learning for offline reinforcement learning,” inAdvances in Neural Information Processing Systems, vol. 33, 2020, pp. 1179–1191
2020
-
[13]
A minimalist approach to offline reinforce- ment learning,
S. Fujimoto and S. S. Gu, “A minimalist approach to offline reinforce- ment learning,” inAdvances in Neural Information Processing Systems, 2021
2021
-
[14]
Playing atari with deep reinforcement learn- ing,
V . Mnih, K. Kavukcuoglu, D. Silver, A. Graves, I. Antonoglou, D. Wier- stra, and M. Riedmiller, “Playing atari with deep reinforcement learn- ing,”arXiv preprint arXiv:1312.5602, 2013
Pith/arXiv arXiv 2013
-
[15]
R. S. Sutton and A. G. Barto,Reinforcement Learning: An Introduction, 2nd ed. Cambridge, MA: MIT Press, 2018
2018
-
[16]
Deep learning for universal linear embeddings of nonlinear dynamics,
B. Lusch, J. N. Kutz, and S. L. Brunton, “Deep learning for universal linear embeddings of nonlinear dynamics,”Nature Communications, vol. 9, no. 1, p. 4950, 2018
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.