A Methodology for Characterizing Underwater Radiated Noise from Submerged Electric Vehicles in a Coastal Environment: An AUV Test Case
Pith reviewed 2026-06-25 21:59 UTC · model grok-4.3
The pith
An eight-step methodology resolves distinct tonal and modulated acoustic signatures from submerged electric vehicles in coastal environments.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
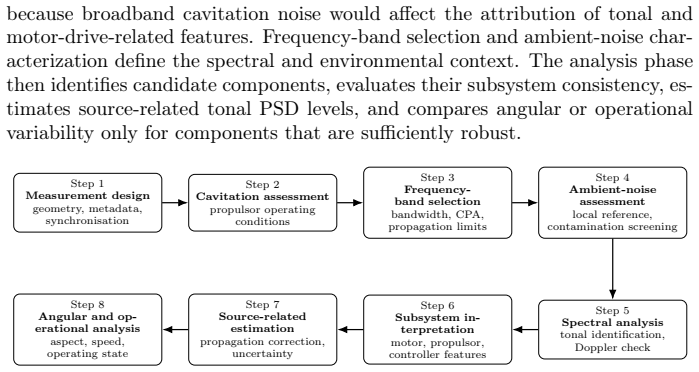
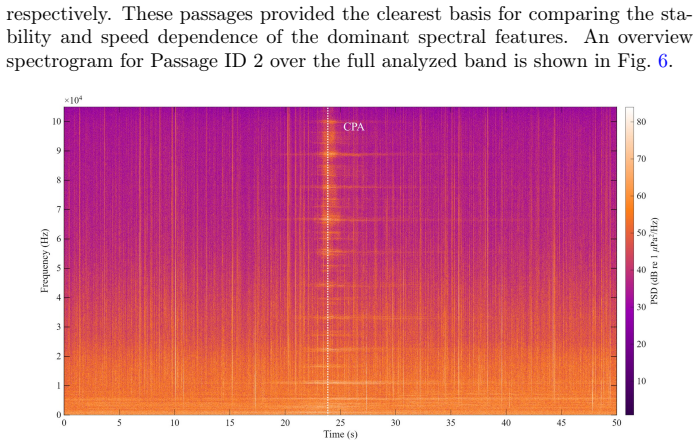
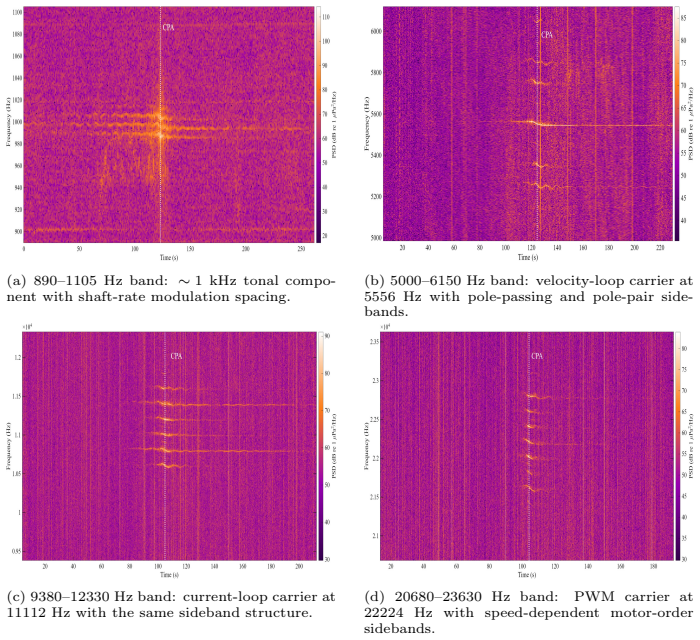
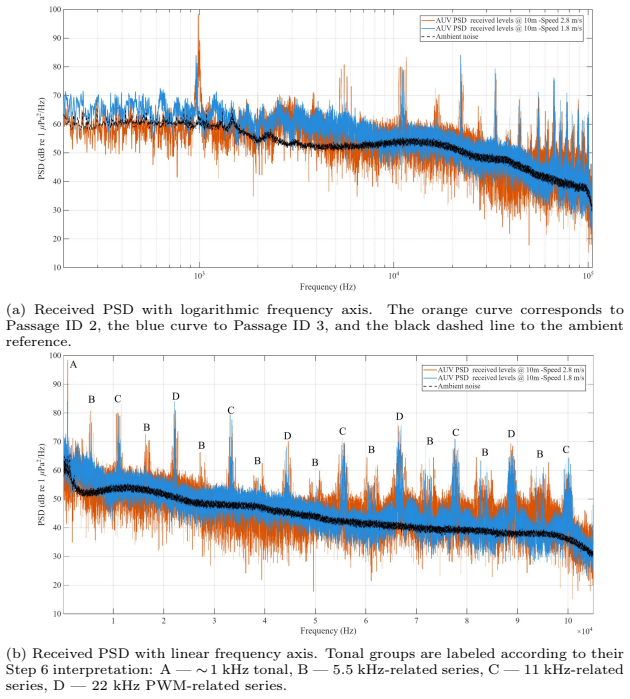
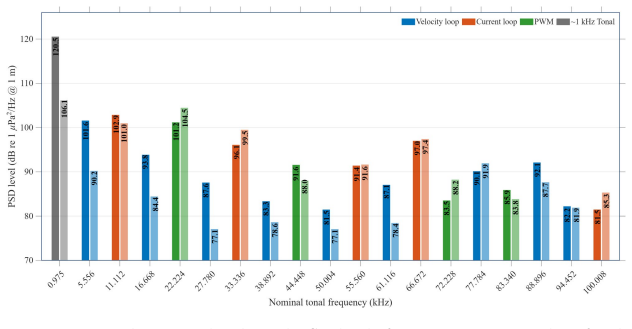
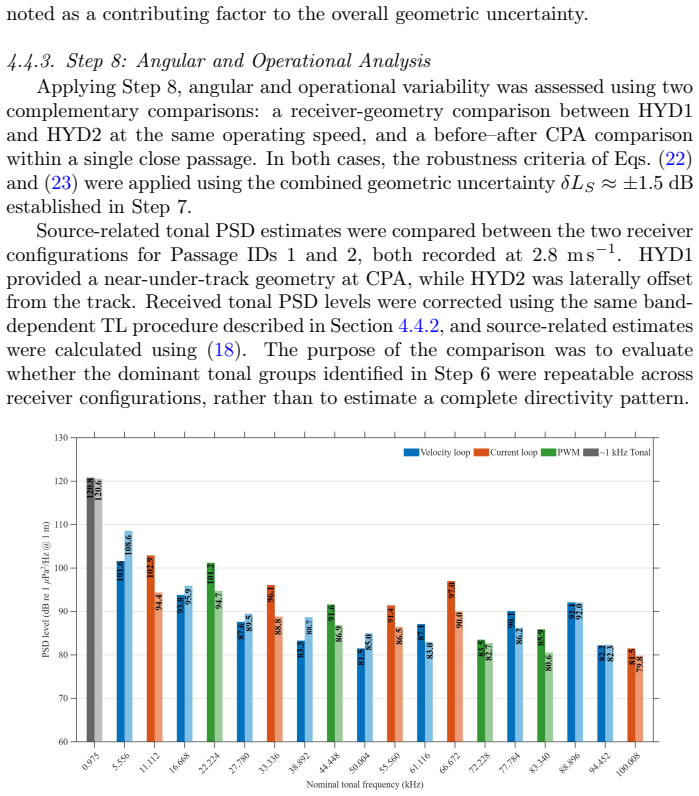
The paper presents an eight-step methodology for characterizing underwater radiated noise from submerged electric vehicles. The steps include measurement design, cavitation assessment, frequency-band selection, ambient-noise characterization, spectral and time-frequency analysis, subsystem-oriented interpretation, propagation-corrected source-related estimation, and angular and operational analysis. When applied to an A18D AUV in coastal water, it identifies drive-related tonal groups near 5.56, 11.1, and 22.2 kHz with harmonics up to 105 kHz, and source-related tonal PSD estimates from 77 to 120 dB re 1 μPa²/Hz at 1 m.
What carries the argument
The eight-step methodology that integrates calibrated pass-by acoustics with synchronized vehicle metadata, ambient-noise context, and subsystem-oriented analysis to resolve tonal and modulated features.
Load-bearing premise
Ambient noise, shallow-water propagation, and aspect-dependent radiation can obscure vehicle-related features, yet the eight-step integration of pass-by acoustics, metadata, and subsystem analysis will still resolve tonal and modulated signatures in coastal settings.
What would settle it
If applying the eight-step methodology to the A18D AUV measurements yields no identifiable tonal groups near 5.56 kHz or their harmonics, this would indicate the method does not resolve the features as claimed.
Figures

read the original abstract
Submerged electric vehicles (SEVs), including autonomous underwater vehicles (AUVs), remotely operated vehicles, and diver propulsion systems, may radiate distinct tonal, harmonic, and modulated acoustic components associated with electric propulsion drives and motor-control electronics. Characterizing these signatures is relevant to passive detection and engineering diagnostics, but remains challenging in coastal environments because ambient noise, shallow-water propagation, and aspect-dependent radiation can obscure vehicle-related features. Existing underwater radiated noise (URN) standards, developed primarily for surface vessels, do not address the spectral, operational, and geometric complexity of SEV measurements. This paper presents an eight-step methodology for SEV URN characterization, covering measurement design, cavitation assessment, frequency-band selection, ambient-noise characterization, spectral and time-frequency analysis, subsystem-oriented interpretation, propagation-corrected source-related estimation, and angular and operational analysis. The novelty lies in integrating calibrated pass-by acoustics with synchronized vehicle metadata, ambient-noise context, and subsystem-oriented analysis to resolve tonal and modulated features that broadband methods cannot capture. The methodology is demonstrated using an A18D AUV measured in coastal water. Drive-related tonal groups were observed near 5.56, 11.1, and 22.2 kHz, with harmonic structure up to 105 kHz. Source-related tonal PSD estimates ranged from 77 to 120 dB re 1 uPa^2/Hz at 1 m
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents an eight-step methodology for characterizing underwater radiated noise from submerged electric vehicles (SEVs) such as AUVs in coastal settings. It integrates calibrated pass-by acoustics with synchronized vehicle metadata, ambient-noise context, and subsystem-oriented analysis to isolate tonal and modulated features. The approach is demonstrated on an A18D AUV, reporting drive-related tonal groups near 5.56, 11.1, and 22.2 kHz (with harmonics to 105 kHz) and source-related tonal PSD estimates of 77–120 dB re 1 μPa²/Hz at 1 m.
Significance. If implemented with verifiable details, the integrated methodology could fill a gap left by surface-vessel URN standards when applied to SEVs, enabling better resolution of tonal signatures relevant to passive detection and diagnostics. The explicit combination of pass-by data, metadata, and subsystem interpretation, together with the provision of quantitative observational results, constitutes a concrete demonstration that could serve as a starting point for further work in the field.
major comments (1)
- [Abstract and methodology outline] Abstract / eight-step methodology description: the central claim that the integrated approach resolves tonal features despite ambient noise, shallow-water propagation, and aspect dependence rests on the eight steps being executable and effective, yet no implementation details, data-quality checks, verification procedures, or explicit linkage between observed tonals (5.56/11.1/22.2 kHz) and specific subsystems are supplied. This absence is load-bearing for assessing whether the reported PSD values and harmonic structure are attributable to the vehicle.
minor comments (1)
- [Abstract] Notation: 'uPa' should be rendered as 'μPa' for standard SI consistency in the reported PSD units.
Simulated Author's Rebuttal
We thank the referee for the constructive assessment and the recommendation for major revision. We address the single major comment point-by-point below.
read point-by-point responses
-
Referee: [Abstract and methodology outline] Abstract / eight-step methodology description: the central claim that the integrated approach resolves tonal features despite ambient noise, shallow-water propagation, and aspect dependence rests on the eight steps being executable and effective, yet no implementation details, data-quality checks, verification procedures, or explicit linkage between observed tonals (5.56/11.1/22.2 kHz) and specific subsystems are supplied. This absence is load-bearing for assessing whether the reported PSD values and harmonic structure are attributable to the vehicle.
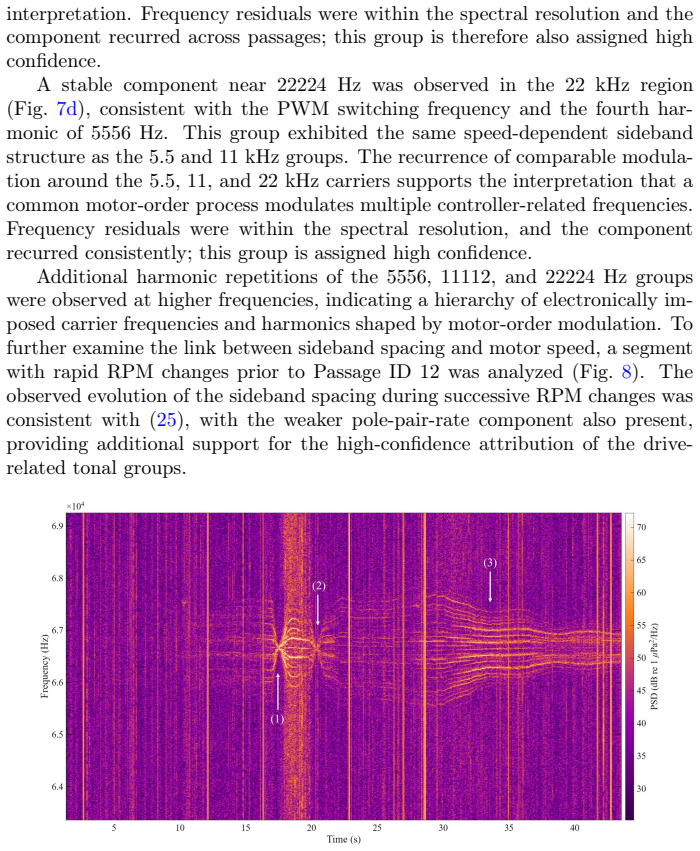
Authors: We agree that the abstract and methodology outline supply only a high-level enumeration of the eight steps and do not furnish the concrete implementation details, quality-control criteria, verification steps, or subsystem-to-tonal mappings required to evaluate the central claim. In the revised manuscript we will expand the dedicated methodology section (currently Section 3) to document, for the A18D data set: (i) exact parameter choices and thresholds applied at each step (e.g., SNR criteria for tonal detection, propagation-model assumptions, aspect-angle binning), (ii) data-quality checks performed (calibration verification, ambient-noise stationarity tests, metadata synchronization tolerances), (iii) verification procedures (repeatability across runs, cross-checks against vehicle telemetry), and (iv) the explicit engineering rationale linking the 5.56/11.1/22.2 kHz groups and their harmonics to particular drive and motor-control subsystems. These additions will be supported by additional figures or tables as needed. revision: yes
Circularity Check
No significant circularity in the derivation chain
full rationale
The paper describes an empirical eight-step measurement methodology for SEV URN characterization, demonstrated via pass-by acoustics and metadata on an A18D AUV, with reported tonal observations at specific frequencies and PSD levels. No equations, derivations, fitted parameters, or predictions are present that could reduce to inputs by construction. The work is a descriptive integration of calibrated measurements, ambient context, and subsystem analysis, fully self-contained against external benchmarks with no self-citation load-bearing or ansatz smuggling.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
R. B. Wynn, V. A. I. Huvenne, T. P. Le Bas, B. J. Murton, D. P. Connelly, B.J.Bett, H.A.Ruhl, K.J.Morris, J.Peakall, D.R.Parsons, E.J.Sumner, S. E. Hunt, Autonomous underwater vehicles (AUVs): Their past, present and future contributions to the advancement of marine geoscience, Marine Geology 352 (2014) 451–468.doi:10.1016/j.margeo.2014.03.012
-
[2]
J. Hwang, N. Bose, S. Fan, AUV adaptive sampling methods: A review, Applied Sciences 9 (15) (2019) 3145.doi:10.3390/app9153145
-
[3]
R. Capocci, G. Dooly, E. Omerdić, J. Coleman, T. Newe, D. Toal, Inspection-class remotely operated vehicles—a review, Journal of Marine Science and Engineering 5 (1) (2017) 13.doi:10.3390/jmse5010013
-
[4]
OCEANOISE Conference Series Science Advisory Committee, OCEANOISE2026 declaration: A call for immediate action on ocean noise, Declaration issued at the 4th OCEANOISE International Confer- ence, Vilanova i la Geltrú, Spain, 25–29 May 2026 (May 2026)
2026
-
[5]
A. Wibisono, M. J. Piran, H.-K. Song, B. M. Lee, A survey on unmanned underwater vehicles: Challenges, enabling technologies, and future research directions, Sensors 23 (17) (2023) 7321.doi:10.3390/s23177321
-
[6]
K. R. Kita, S. Cho, K. Railey, Y. Zhang, N. B. Crook, H. Schmidt, Pas- sive acoustic tracking of an unmanned underwater vehicle using bearing- doppler-speed measurements, The Journal of the Acoustical Society of America 151 (2) (2022) 1311–1324.doi:10.1121/10.0009450
-
[7]
G. Griffiths, P. Enoch, N. W. Millard, On the radiated noise of the autosub autonomous underwater vehicle, ICES Journal of Marine Science 58 (6) (2001) 1195–1200.doi:10.1006/jmsc.2001.1120
-
[8]
J. Syrjälä, R. Kalliola, J. Pajala, Underwater acoustic environment of coastal sea with heavy shipping traffic: NE Baltic Sea during wintertime, Frontiers in Marine Science 7 (2020) 589141.doi:10.3389/fmars.2020. 589141
-
[9]
J. K. Garrett, P. Blondel, B. J. Godley, S. K. Pikesley, M. J. Witt, L. Jo- hanning, Long-term underwater sound measurements in the shipping noise indicator bands 63 hz and 125 hz from the port of falmouth bay, uk, Marine Pollution Bulletin 110 (1) (2016) 438–448.doi:10.1016/j.marpolbul. 2016.06.021
-
[10]
J. A. Hildebrand, Anthropogenic and natural sources of ambient noise in the ocean, Marine Ecology Progress Series 395 (2009) 5–20.doi:10.3354/ meps08353. 45
2009
-
[11]
W. W. L. Au, K. Banks, The acoustics of the snapping shrimpSynalpheus parneomerisin Kaneohe Bay, The Journal of the Acoustical Society of America 103 (1) (1998) 41–47.doi:10.1121/1.423234
-
[12]
J. H. Haxel, R. P. Dziak, H. Matsumoto, Observations of shallow water marine ambient sound: The low frequency underwater soundscape of the central Oregon coast, The Journal of the Acoustical Society of America 133 (5) (2013) 2586–2596.doi:10.1121/1.4796132
-
[13]
B.G.Katsnelson, V.G.Petnikov, Shallowwateracoustics, SpringerScience & Business Media, 2002
2002
-
[14]
J. Gebbie, M. Siderius, J. S. Allen, Aspect-dependent radiated noise analysis of an underway autonomous underwater vehicle, The Journal of the Acoustical Society of America 132 (5) (2012) EL351–EL357.doi: 10.1121/1.4754419
-
[15]
K. E. Railey, D. DiBiaso, H. Schmidt, An acoustic remote sensing method for high-precision propeller rotation and speed estimation of unmanned un- derwater vehicles, The Journal of the Acoustical Society of America 148 (6) (2020) 3942–3950.doi:10.1121/10.0002954
-
[16]
J. Le Besnerais, V. Lanfranchi, M. Hecquet, P. Brochet, Characterization and reduction of audible magnetic noise due to PWM supply in induction machines, IEEE Transactions on Industrial Electronics 57 (4) (2010) 1288– 1295.doi:10.1109/TIE.2009.2029529
-
[17]
URLhttps://www.iso.org/standard/62408.html
International Organization for Standardization, ISO 17208-1:2016 Under- water acoustics – Quantities and procedures for description and measure- ment of underwater sound from ships – Part 1: Requirements for precision measurements in deep water used for comparison purposes, international Standard (2016). URLhttps://www.iso.org/standard/62408.html
2016
-
[18]
URLhttps://webstore.ansi.org/preview-pages/ASA/preview_ANSI% 2BASA%2BS12.64-2009%2BPart%2B1.pdf
American National Standards Institute, Acoustical Society of America, ANSI/ASA S12.64-2009/Part 1 Quantities and Procedures for Description and Measurement of Underwater Sound from Ships – Part 1: General Re- quirements, american National Standard (2009). URLhttps://webstore.ansi.org/preview-pages/ASA/preview_ANSI% 2BASA%2BS12.64-2009%2BPart%2B1.pdf
2009
-
[19]
Ross, Mechanics of Underwater Noise, Peninsula Publishing, Westport, CT, 1987, reprint of the 1976 Pergamon Press edition
D. Ross, Mechanics of Underwater Noise, Peninsula Publishing, Westport, CT, 1987, reprint of the 1976 Pergamon Press edition
1987
-
[20]
J. D. Holmes, W. M. Carey, J. F. Lynch, An overview of unmanned under- water vehicle noise in the low to mid frequency bands, The Journal of the Acoustical Society of America 127 (2010) 1812. 46
2010
-
[21]
J. M. Cuschieri, D. Vendittis, S. Frandsen, Auv self noise control and acoustic signature experimental analysis, Technical Report ADA625212, Florida Atlantic University, Department of Ocean Engineering (2001). doi:10.21236/ADA625212
-
[22]
R. Zimmerman, G. L. D’Spain, C. D. Chadwell, Decreasing the radiated acoustic and vibration noise of a mid-size auv, IEEE Journal of Oceanic Engineering 30 (1) (2005) 179–187.doi:10.1109/JOE.2004.836996
-
[23]
J. S. Carlton, Marine Propellers and Propulsion, 3rd Edition, Butterworth- Heinemann, Oxford, 2012
2012
-
[24]
C. E. Brennen, Cavitation and Bubble Dynamics, Oxford University Press, New York, 1995
1995
-
[25]
W. C. Lo, C. C. Chan, Z. Q. Zhu, L. Xu, D. Howe, K. T. Chau, Acoustic noise radiated by pwm-controlled induction machine drives, IEEE Trans- actions on Industrial Electronics 47 (4) (2000) 880–889.doi:10.1109/41. 857968
work page doi:10.1109/41 2000
-
[26]
M. Cai, I. M. Sou, C. Layman, B. Bingham, J. S. Allen, Characterization of the acoustic signature of a small remotely operated vehicle for detection, in: OCEANS 2010 MTS/IEEE Seattle, Seattle, WA, USA, 2010, pp. 1–7. doi:10.1109/OCEANS.2010.5664040
-
[27]
M. Cai, B. Bingham, Passive acoustic detection of a small remotely oper- ated vehicle, in: OCEANS 2011 IEEE – Spain, Santander, Spain, 2011, pp. 1–7.doi:10.1109/Oceans-Spain.2011.6003555
-
[28]
K. Buszman, W. Mironiuk, Investigation of the underwater noise associated with remotely operated vehicles, Polish Maritime Research 25 (4) (2018) 99–106.doi:10.2478/pomr-2018-0138
-
[29]
G. Picardi, C. Borrelli, A. Sarti, G. Chimienti, M. Calisti, A minimal metric for the characterization of acoustic noise emitted by underwater vehicles, Sensors 20 (22) (2020) 6644.doi:10.3390/s20226644
-
[30]
S. Rong, J. Liu, Y. Wang, Q. Li, Motion parameter estimation of AUV based on underwater acoustic Doppler frequency measured by single hy- drophone, Frontiers in Marine Science 9 (2022) 1019385.doi:10.3389/ fmars.2022.1019385
arXiv 2022
-
[31]
S. Zhang, X. Ma, A speed measurement method using AUV radiated noise spectrum, in: 2018 OCEANS - MTS/IEEE Kobe Techno-Oceans (OTO), IEEE, 2018, pp. 1–5.doi:10.1109/OCEANSKOBE.2018.8559305
-
[32]
Zhang, Q
C. Zhang, Q. Xu, H. Yang, Z. Peng, J. Li, J. Zhou, Experimental study and numerical simulation of radiated noise from unmanned underwater vehicle, Polish Maritime Research 31 (4) (2024) 131–141.doi:10.2478/ pomr-2024-0057. 47
2024
-
[33]
C. Yu, R. Wang, X. Zhang, Y. Li, Experimental and numerical study on underwater radiated noise of auv, Ocean Engineering 201 (2020) 107111. doi:10.1016/j.oceaneng.2020.107111
-
[34]
Y. Liu, L. Liang, Measurement of underwater radiated noise in small un- manned underwater vehicles based on noise curve feature extraction, in: 2024 OES China Ocean Acoustics (COA), IEEE, 2024.doi:10.1109/ COA58979.2024.10723445
arXiv 2024
-
[35]
Diamant, F
R. Diamant, F. Ferreira, Passive detection of scooter’s underwater radiated noise, in: 2025 33rd European Signal Processing Conference (EUSIPCO), IEEE, 2025, pp. 141–145
2025
-
[36]
F. B. Jensen, W. A. Kuperman, M. B. Porter, H. Schmidt, Computational Ocean Acoustics, 2nd Edition, Springer, New York, 2011.doi:10.1007/ 978-1-4419-8678-8
2011
-
[37]
K. G. Foote, Discriminating between the nearfield and the farfield of acous- tic transducers, The Journal of the Acoustical Society of America 136 (4) (2014) 1511–1517.doi:10.1121/1.4895701
-
[38]
pdf, revision 1
Indian Register of Shipping, Guidelines on underwater radiated noise and measurements,https://www.irclass.org/media/7786/ irs-guidelines-on-underwater-radiated-noise_rev-1_march-2025. pdf, revision 1. Accessed: 4 May 2026 (Mar. 2025)
2025
-
[39]
InternationalTowingTankConference, Ittc–recommendedproceduresand guidelines: Propeller cavitation, Tech. Rep. 7.5-02-03-03.1, ITTC (2021). URLhttps://www.ittc.info/media/9765/75-02-03-031.pdf
2021
-
[40]
P. Welch, The use of fast Fourier transform for the estimation of power spectra: A method based on time averaging over short, modified peri- odograms, IEEE Transactions on Audio and Electroacoustics 15 (2) (1967) 70–73.doi:10.1109/TAU.1967.1161901
-
[41]
J. S. Bendat, A. G. Piersol, Random Data: Analysis and Measurement Procedures, 4th Edition, Wiley, Hoboken, NJ, 2010
2010
-
[42]
Charney School of Marine Sciences, Ocean instrument: Snapir auv (3000 m),https://marsci.haifa.ac.il/en/ocean-instruments/, accessed: 4 May 2026 (n.d.)
Leon H. Charney School of Marine Sciences, Ocean instrument: Snapir auv (3000 m),https://marsci.haifa.ac.il/en/ocean-instruments/, accessed: 4 May 2026 (n.d.)
2026
-
[43]
Teledyne RD Instruments, Navigator Doppler Velocity Log (DVL) techni- cal manual, p/N 957-6172-00. URL:https://www.teledynemarine.com/ en-us/resources/Documents/Brand%20Support/RD%20INSTRUMENTS/ Technical%20Resources/Manuals%20and%20Guides/WorkHorse% 20Navigator/Navigator%20Technical%20Manual_Jun20.pdf(accessed 08 June 2026) (Dec. 2017). 48
2026
-
[44]
Issued: 8 August 2008
Allied Motion Technologies Inc., Megaflux housed brushless torque mo- tors,https://www.mclennan.co.uk/datasheet/1849, datasheet. Issued: 8 August 2008. Accessed: 4 May 2026 (2008)
2008
-
[45]
Accessed: 4 May 2026 (n.d.)
Elmo Motion Control, Guitar,https://www.elmomc.com/product/ guitar/, product webpage. Accessed: 4 May 2026 (n.d.)
2026
-
[46]
gov.il/en/pages/haifa-bathymetric-map, accessed 2 June 2026 (2020)
Geological Survey of Israel, Haifa Bay Bathymetric Map,https://www. gov.il/en/pages/haifa-bathymetric-map, accessed 2 June 2026 (2020)
2026
-
[47]
EU Copernicus Marine Service, Mediterranean sea physics reanalysis, https://data.marine.copernicus.eu/product/MEDSEA_MULTIYEAR_ PHY_006_004, product ID: MEDSEA_MULTIYEAR_PHY_006_004. Mercator Ocean International. Accessed: 4 May 2026 (2022). doi:10.25423/CMCC/MEDSEA_MULTIYEAR_PHY_006_004_E3R1
work page doi:10.25423/cmcc/medsea_multiyear_phy_006_004_e3r1 2026
-
[48]
K. V. Mackenzie, Nine-term equation for sound speed in the oceans, The Journal of the Acoustical Society of America 70 (3) (1981) 807–812.doi: 10.1121/1.386920
-
[49]
S. M. Haver, J. D. Adams, L. T. Hatch, S. M. Van Parijs, R. P. Dziak, J. Haxel, S. A. Heppell, M. F. McKenna, D. K. Mellinger, J. Gedamke, Large vessel activity and low-frequency underwater sound benchmarks in united states waters, Frontiers in Marine Science 8 (2021) 669528.doi: 10.3389/fmars.2021.669528
-
[50]
International Organization for Standardization, ISO 17208-2: Underwater acoustics — quantities and procedures for description and measurement of underwater sound from ships — Part 2: Determination of source levels from deep-water measurements (2019)
2019
-
[51]
Y. Hua, T. K. Sarkar, Matrix pencil method for estimating parameters of exponentially damped/undamped sinusoids in noise, IEEE Transactions on Acoustics, Speech, and Signal Processing 38 (5) (1990) 814–824
1990
-
[52]
R. O. Schmidt, Multiple emitter location and signal parameter estimation, IEEE Transactions on Antennas and Propagation 34 (3) (1986) 276–280
1986
-
[53]
R. Roy, T. Kailath, ESPRIT—estimation of signal parameters via rota- tional invariance techniques, IEEE Transactions on Acoustics, Speech, and Signal Processing 37 (7) (1989) 984–995
1989
-
[54]
R. J. Urick, Principles of Underwater Sound, 3rd Edition, McGraw-Hill, New York, 1983
1983
-
[55]
M. A. Ainslie, M. B. Halvorsen, S. P. Robinson, T. Lippert, Semi-coherent image method to estimate propagation loss for underwater sound source level measurements, Proceedings of Meetings on Acoustics 47 (1) (2022) 070024.doi:10.1121/2.0001705. 49
-
[56]
W. H. Thorp, Analytic description of the low-frequency attenuation co- efficient, Journal of the Acoustical Society of America 42 (1) (1967) 270. doi:10.1121/1.1910566. 50
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.