PL-LIT: A LiDAR-Inertial-Thermal SLAM Using Point-Line Features and Thermographic Mapping
Pith reviewed 2026-06-30 07:41 UTC · model grok-4.3
The pith
A LiDAR-inertial-thermal SLAM system maintains stable tracking in visible and thermal images by calibrating for automatic gain control and extracting point-line features.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
PL-LIT combines online photometric calibration with a deep neural network for point-line feature extraction to produce stable thermal tracking, then fuses the features with LiDAR and inertial data inside an error-state iterated Kalman filter that includes explicit line constraints, and finally maintains a probabilistic thermal-intensity voxel map that supports real-time anomaly detection.
What carries the argument
The online photometric calibration module together with the deep neural network point-line extractor, which supplies repeatable geometric constraints to the tightly coupled LiDAR-inertial-thermal error-state iterated Kalman filter.
If this is right
- Odometry remains usable in low light, fog, or intense illumination where visible cameras degrade.
- Line-feature constraints keep geometric observations reliable even when thermal appearance changes between frames.
- The thermal voxel map enables immediate detection of hot or cold anomalies during mapping.
- The same pipeline works without modification for standard visible-light cameras.
Where Pith is reading between the lines
- The calibration-plus-network approach could be tested on other low-contrast sensors such as event cameras or infrared depth sensors.
- The voxel map structure might support downstream tasks like heat-source localization without extra post-processing.
- Extending the filter to include loop closure from thermal line matches could further reduce drift on very long trajectories.
Load-bearing premise
That photometric calibration and neural-network feature extraction can produce sufficiently stable and repeatable points and lines in thermal images despite automatic gain control and low global contrast.
What would settle it
A long-range thermal sequence in which the system loses track or reports position drift larger than competing visible-only or thermal-only methods on the same data.
Figures


read the original abstract
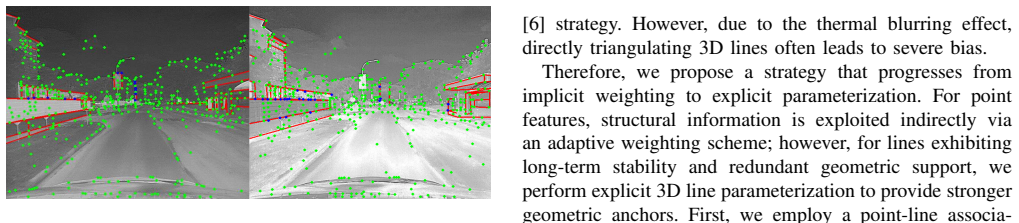
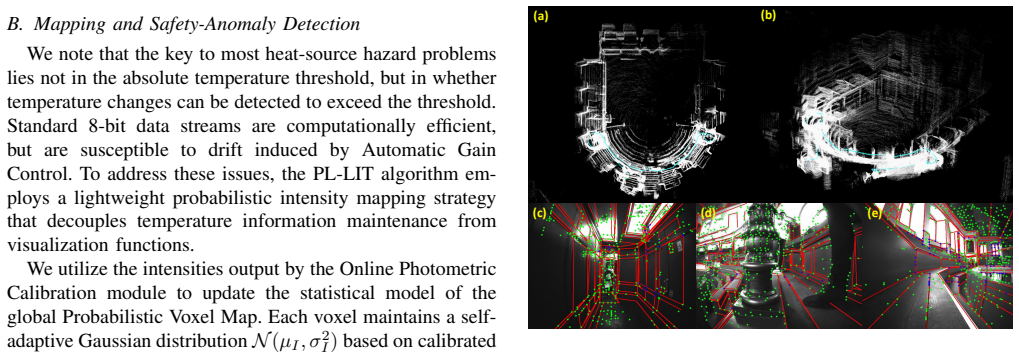
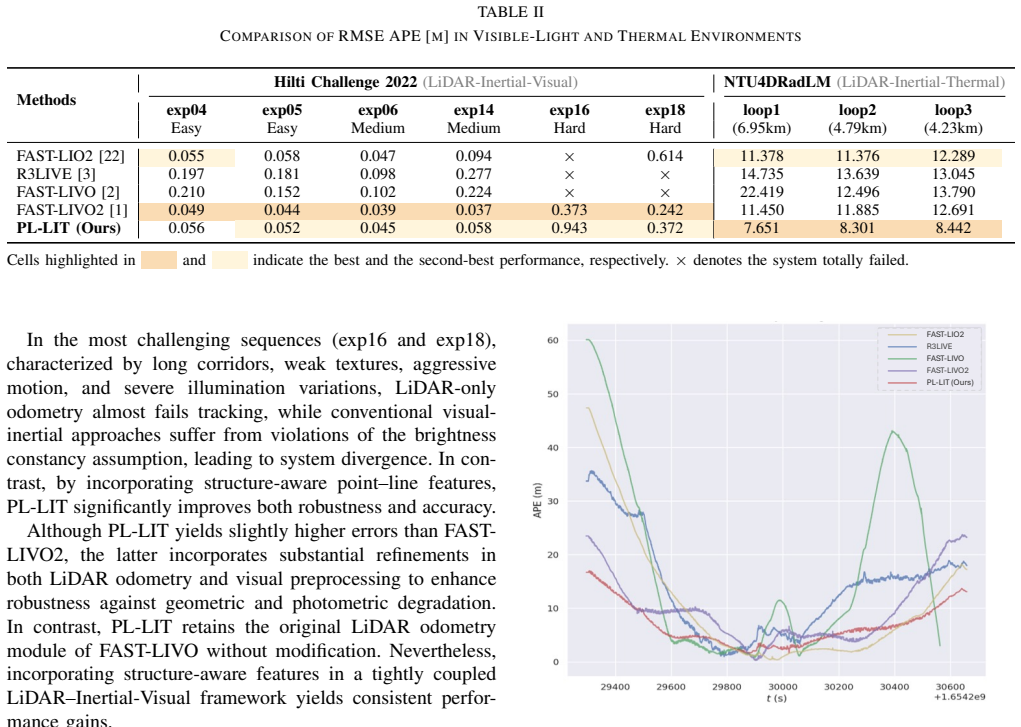
Thermal imaging is resilient to adverse conditions, such as intense illumination, low-light operation, and fog, and can therefore mitigate odometry degradation when visible-spectrum imagery becomes unreliable. Nevertheless, most thermal cameras employ automatic gain control (AGC), and thermal images often present low global contrast despite containing informative edge structures. These characteristics undermine brightness constancy and cause conventional optical flow tracking-based odometry pipelines that fundamentally rely on the brightness constancy assumption across consecutive frames. To address these issues, we propose a general LiDAR-Inertial-Thermal SLAM system that accommodates both visible-light and thermal cameras. PL-LIT combines an online photometric calibration module with a deep neural network for point-line feature extraction, enabling more stable and repeatable thermal tracking. For state estimation, we design a tightly coupled LiDAR-Inertial-Thermal formulation within an Error-State Iterated Kalman Filter (ESIKF). We further introduce a line-feature constraint scheme ensuring the reliability of geometric constraints across varying thermal appearances. In addition, PL-LIT builds a probabilistic thermal-intensity voxel map, which supports real-time thermal anomaly detection. Extensive experiments demonstrate that PL-LIT exhibits generality and robustness in visible-light environments, achieves state-of-the-art performance on long-range thermal infrared datasets, and provides practical safety inspection functionality based on thermographic mapping.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes PL-LIT, a LiDAR-Inertial-Thermal SLAM system designed to operate with both visible-light and thermal cameras. It integrates an online photometric calibration module with a deep neural network for point-line feature extraction to mitigate automatic gain control (AGC) and low-contrast issues in thermal imagery, employs a tightly-coupled formulation inside an Error-State Iterated Kalman Filter (ESIKF), introduces a line-feature constraint scheme, and constructs a probabilistic thermal-intensity voxel map supporting real-time anomaly detection. The manuscript claims generality and robustness in visible-light settings, state-of-the-art performance on long-range thermal infrared datasets, and practical utility for safety inspection via thermographic mapping.
Significance. If the experimental claims are substantiated, the work would advance multi-modal SLAM by demonstrating a practical route to reliable odometry and mapping when visible-spectrum sensors degrade, with direct relevance to inspection and navigation tasks in low-visibility or high-dynamic-range environments. The thermographic mapping component adds a functional layer beyond pure localization that is uncommon in existing LiDAR-inertial-thermal pipelines.
major comments (3)
- [Method (feature extraction) and Experiments] The central technical claim—that online photometric calibration plus DNN point-line extraction yields sufficiently stable and repeatable features under AGC and low global contrast—is load-bearing for the ESIKF formulation and all downstream performance assertions, yet no section supplies quantitative feature-stability metrics (repeatability scores, inlier ratios, or tracking-duration statistics) on thermal sequences with realistic AGC behavior.
- [Experiments] Table(s) reporting trajectory errors on the long-range thermal datasets are referenced in the abstract as demonstrating SOTA performance, but the manuscript provides neither the numerical values, the exact baselines compared, nor error bars or statistical significance tests, preventing verification of the claimed superiority.
- [State estimation formulation] The line-feature constraint scheme is presented as ensuring geometric reliability across varying thermal appearances, but the manuscript does not include an explicit derivation or sensitivity analysis showing how the constraint remains consistent when photometric calibration residuals persist.
minor comments (2)
- [Mapping module] Notation for the probabilistic thermal-intensity voxel map is introduced without a clear definition of the probability model or update equations.
- [Experiments] The abstract states that the system 'accommodates both visible-light and thermal cameras,' but the experimental section does not report separate ablation results isolating performance differences between the two modalities.
Simulated Author's Rebuttal
We thank the referee for the thorough review and constructive feedback. We address each major comment point by point below, indicating planned revisions where the manuscript can be strengthened.
read point-by-point responses
-
Referee: [Method (feature extraction) and Experiments] The central technical claim—that online photometric calibration plus DNN point-line extraction yields sufficiently stable and repeatable features under AGC and low global contrast—is load-bearing for the ESIKF formulation and all downstream performance assertions, yet no section supplies quantitative feature-stability metrics (repeatability scores, inlier ratios, or tracking-duration statistics) on thermal sequences with realistic AGC behavior.
Authors: We agree that direct quantitative metrics on feature stability would provide stronger support for the central claim. In the revised manuscript we will add a dedicated subsection reporting repeatability scores, inlier ratios, and tracking-duration statistics computed on thermal sequences that exhibit realistic AGC behavior, thereby supplying the requested evidence. revision: yes
-
Referee: [Experiments] Table(s) reporting trajectory errors on the long-range thermal datasets are referenced in the abstract as demonstrating SOTA performance, but the manuscript provides neither the numerical values, the exact baselines compared, nor error bars or statistical significance tests, preventing verification of the claimed superiority.
Authors: We acknowledge that clearer presentation of the numerical results is needed. The revised manuscript will include complete tables with all trajectory error values, explicit baseline names, error bars, and statistical significance tests to allow direct verification of the performance claims. revision: yes
-
Referee: [State estimation formulation] The line-feature constraint scheme is presented as ensuring geometric reliability across varying thermal appearances, but the manuscript does not include an explicit derivation or sensitivity analysis showing how the constraint remains consistent when photometric calibration residuals persist.
Authors: The line-feature constraint is embedded in the ESIKF measurement model; however, an expanded derivation and sensitivity analysis with respect to photometric residuals will be added to the main text or appendix in the revision to demonstrate consistency under residual photometric errors. revision: yes
Circularity Check
No circularity: engineering system description with no derivations or self-referential reductions
full rationale
The provided abstract and description present PL-LIT as an integrated SLAM pipeline combining photometric calibration, a DNN for point-line extraction, ESIKF state estimation, line constraints, and a thermal voxel map. No equations, parameter-fitting steps, predictions derived from fitted inputs, uniqueness theorems, or self-citations appear in the text. The central claims rest on empirical performance rather than any derivation chain that reduces to its own inputs by construction. This is a standard engineering integration paper whose validity depends on external validation experiments, not internal circularity.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Fast- livo2: Fast, direct lidar–inertial–visual odometry,
C. Zheng, W. Xu, Z. Zou, T. Hua, C. Yuan, D. He, B. Zhou, Z. Liu, J. Lin, F. Zhu, Y . Ren, R. Wang, F. Meng, and F. Zhang, “Fast- livo2: Fast, direct lidar–inertial–visual odometry,”IEEE Transactions on Robotics(TRO), vol. 41, pp. 326–346, 2025
2025
-
[2]
Fast-livo: Fast and tightly-coupled sparse-direct lidar-inertial-visual odometry,
C. Zheng, Q. Zhu, W. Xu, X. Liu, Q. Guo, and F. Zhang, “Fast-livo: Fast and tightly-coupled sparse-direct lidar-inertial-visual odometry,” IEEE Robot. Autom. Lett., vol. 7, no. 4, pp. 11 389–11 396, 2022
2022
-
[3]
R3live: A robust, real-time, rgb-colored, lidar- inertial-visual tightly-coupled state estimation and mapping package,
J. Lin and F. Zhang, “R3live: A robust, real-time, rgb-colored, lidar- inertial-visual tightly-coupled state estimation and mapping package,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2022, pp. 10 672– 10 678
2022
-
[4]
Online photometric calibration of automatic gain thermal infrared cameras,
M. P. Das, L. Matthies, and S. Daftry, “Online photometric calibration of automatic gain thermal infrared cameras,”IEEE Robot. Autom. Lett., vol. 6, no. 2, pp. 2453–2460, 2021
2021
-
[5]
Learning attraction field representation for robust line segment detection,
N. Xue, S. Bai, F.-D. Wang, G.-S. Xia, T. Wu, and L. Zhang, “Learning attraction field representation for robust line segment detection,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2019, pp. 1595–1603
2019
-
[6]
AirSLAM: An efficient and illumination-robust point-line visual slam system,
K. Xu, Y . Hao, S. Yuan, C. Wang, and L. Xie, “AirSLAM: An efficient and illumination-robust point-line visual slam system,” IEEE Transactions on Robotics (TRO), 2024. [Online]. Available: https://arxiv.org/abs/2408.03520
-
[7]
Loam: Lidar odometry and mapping in real- time,
J. Zhang and S. Singh, “Loam: Lidar odometry and mapping in real- time,”Robotics: Science and Systems, 2014
2014
-
[8]
Block-map-based localization in large-scale environment,
Y . Feng, Z. Jiang, Y . Shi, Y . Feng, X. Chen, H. Zhao, and G. Zhou, “Block-map-based localization in large-scale environment,” in2024 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2024, pp. 1709–1715
2024
-
[9]
Lvi-sam: Tightly-coupled lidar-visual-inertial odometry via smoothing and mapping,
T. Shan, B. Englot, C. Ratti, and D. Rus, “Lvi-sam: Tightly-coupled lidar-visual-inertial odometry via smoothing and mapping,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2021, pp. 5692–5698
2021
-
[10]
R2live: A robust, real- time, lidar-inertial-visual tightly-coupled state estimator and mapping,
J. Lin, C. Zheng, W. Xu, and F. Zhang, “R2live: A robust, real- time, lidar-inertial-visual tightly-coupled state estimator and mapping,” IEEE Robot. Autom. Lett., vol. 6, no. 4, pp. 7469–7476, 2021
2021
-
[11]
S. Zhou, Z. Wang, X. Dai, W. Song, and S. Gu, “Lir-livo: A lightweight, robust lidar-inertial-visual odometry with illumination- resilient deep features,”arXiv preprint arXiv:2502.08676, 2025
-
[12]
Hand-held monocular slam in thermal- infrared,
S. Vidas and S. Sridharan, “Hand-held monocular slam in thermal- infrared,” inProceedings of the IEEE 12th International Conference on Control, Automation, Robotics and Vision (ICARCV), 2012, pp. 859–864
2012
-
[13]
Sparse depth enhanced direct thermal-infrared slam beyond the visible spectrum,
Y .-S. Shin and A. Kim, “Sparse depth enhanced direct thermal-infrared slam beyond the visible spectrum,”IEEE Robot. Autom. Lett., vol. 4, no. 3, pp. 2918–2925, 2019
2019
-
[14]
Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam,
C. Campos, R. Elvira, J. J. G. Rodr ´ıguez, J. M. M. Montiel, and J. D. Tard ´os, “Orb-slam3: An accurate open-source library for visual, visual–inertial, and multimap slam,”IEEE Trans. Robot., vol. 37, no. 6, pp. 1874–1890, 2021
2021
-
[15]
Thermal-inertial slam for the environments with challenging illumination,
J. Jiang, X. Chen, W. Dai, Z. Gao, and Y . Zhang, “Thermal-inertial slam for the environments with challenging illumination,”IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 8767–8774, 2022
2022
-
[16]
Deeptio: A deep thermal-inertial odometry with visual hallucination,
M. R. U. Saputra, P. P. B. de Gusmao, C. X. Lu, Y . Almalioglu, S. Rosa, C. Chen, J. Wahlstr ¨om, W. Wang, A. Markham, and N. Trigoni, “Deeptio: A deep thermal-inertial odometry with visual hallucination,”IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 1672–1679, 2020
2020
-
[17]
Efficient and probabilistic adaptive voxel mapping for accurate online lidar odometry,
C. Yuan, C. Xu, W. Liu, X. Hong, X. Zhang, and L. Zhang, “Efficient and probabilistic adaptive voxel mapping for accurate online lidar odometry,”IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 8518–8525, 2022
2022
-
[18]
Superpoint: Self- supervised interest point detection and description,
D. DeTone, T. Malisiewicz, and A. Rabinovich, “Superpoint: Self- supervised interest point detection and description,” inProceedings of the IEEE conference on computer vision and pattern recognition workshops, 2018, pp. 224–236
2018
-
[19]
Ntu4dradlm: 4d radar-centric multi-modal dataset for localization and mapping,
Y . Luet al., “Ntu4dradlm: 4d radar-centric multi-modal dataset for localization and mapping,”arXiv preprint arXiv:2309.11373, 2023
-
[20]
FAST LIO LC: Implementation of fast-lio with loop clo- sure,
Y . Wang, “FAST LIO LC: Implementation of fast-lio with loop clo- sure,” https://github.com/yanliang-wang/FAST LIO LC, 2023, gitHub repository
2023
-
[21]
Hilti-oxford dataset: A millimeter- accurate benchmark for simultaneous localization and mapping,
L. Zhang, M. Helmberger, L. F. T. Fu, D. Wisth, M. Camurri, D. Scaramuzza, and M. Fallon, “Hilti-oxford dataset: A millimeter- accurate benchmark for simultaneous localization and mapping,”IEEE Robotics and Automation Letters, vol. 8, no. 1, pp. 408–415, 2023
2023
-
[22]
Fast-lio2: Fast direct lidar-inertial odometry,
W. Xu, Y . Cai, D. He, J. Lin, and F. Zhang, “Fast-lio2: Fast direct lidar-inertial odometry,”IEEE Trans. Robot., vol. 38, no. 4, pp. 2053– 2073, 2022
2053
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.