Towards Courteous Behavior and Trajectory Planning for Automated Driving
Pith reviewed 2026-05-24 17:35 UTC · model grok-4.3
The pith
A planning framework generates courteous behaviors and comfortable trajectories for automated vehicles in real time.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that courteous behavior can be integrated into a graph-based behavior planning module for automated driving, with the resulting behavior further optimized for comfort using low-level trajectory generation that satisfies constraints over the entire planning horizon, achieving real-time performance.
What carries the argument
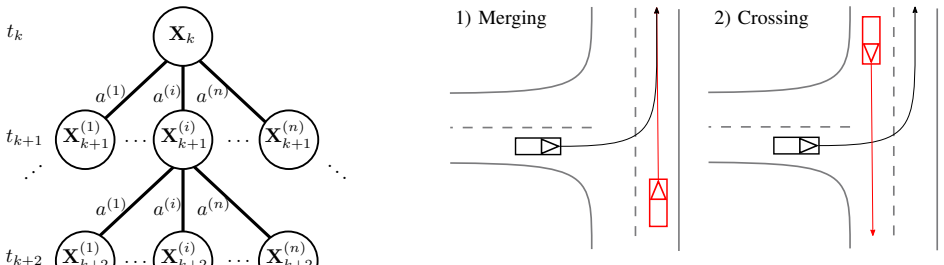
The graph-based behavior planning module that considers comfort, progress, and courtesy of actions, paired with optimal control for trajectory optimization.
If this is right
- Behaviors optimize the ego vehicle's comfort and progress without excessive aggression toward others.
- The trajectory can be refined for comfort while satisfying all constraints throughout the horizon.
- The framework maintains real-time capability suitable for complex intersection scenarios.
- Practical implementation is shown through experiments demonstrating feasibility.
Where Pith is reading between the lines
- This approach could improve social acceptance of autonomous vehicles in mixed human-robot traffic.
- Similar courtesy modeling might apply to other dynamic environments like highways or urban streets.
- Future work could test the framework's performance against human drivers' courtesy levels in simulations.
Load-bearing premise
An efficient formulation of the optimal control problem and solving algorithms is sufficient to keep the courteous planning real-time capable.
What would settle it
A test where the framework fails to produce courteous behaviors or exceeds real-time computation limits on standard vehicle hardware would disprove the central claim.
Figures
read the original abstract
Efficient behavior and trajectory planning is one of the major challenges for automated driving. Especially intersection scenarios are very demanding due to their complexity arising from the variety of maneuver possibilities and other traffic participants. A key challenge is to generate behaviors which optimize the comfort and progress of the ego vehicle but at the same time are not too aggressive towards other traffic participants. In order to maintain real time capability for courteous behavior and trajectory planning, an efficient formulation of the optimal control problem and corresponding solving algorithms are required. Consequently, a novel planning framework is presented which considers comfort and progress as well as the courtesy of actions in a graph-based behavior planning module. Utilizing the low level trajectory generation, the behavior result can be further optimized for driving comfort while satisfying constraints over the whole planning horizon. According experiments show the practicability and real time capability of the framework.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a novel two-stage planning framework for automated driving at complex intersections. A graph-based behavior planning module selects actions that balance the ego vehicle's comfort and progress with courteous behavior toward other traffic participants. The selected behavior is then refined via low-level trajectory generation that optimizes driving comfort subject to constraints over the full planning horizon. The abstract asserts that experiments demonstrate the framework's practicability and real-time capability, with an efficient optimal-control-problem formulation required to achieve the latter.
Significance. If the claimed real-time courteous planning is achieved, the work could contribute to more socially acceptable automated vehicles by explicitly incorporating courtesy as an objective alongside comfort and progress. The separation of high-level graph-based behavior selection from low-level trajectory optimization is a standard and practical architecture for maintaining computational tractability.
major comments (1)
- [Abstract] Abstract: the central claim that 'according experiments show the practicability and real time capability of the framework' is unsupported by any equations, data, error bars, method details, or quantitative results. This absence prevents verification of the asserted real-time performance and courteous behavior, which is load-bearing for the paper's contribution.
Simulated Author's Rebuttal
We thank the referee for the review and the opportunity to address concerns about the support for our claims on practicability and real-time capability. We respond to the major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that 'according experiments show the practicability and real time capability of the framework' is unsupported by any equations, data, error bars, method details, or quantitative results. This absence prevents verification of the asserted real-time performance and courteous behavior, which is load-bearing for the paper's contribution.
Authors: The abstract is intentionally concise and summarizes the experimental findings reported in full in Section V of the manuscript. That section provides quantitative results from intersection simulations, including measured computation times for both the graph-based behavior planner and the trajectory optimizer (demonstrating sub-100 ms average runtimes on standard hardware), as well as metrics quantifying comfort, progress, and courtesy relative to baselines. We agree the abstract could more explicitly reference these results to improve verifiability. In revision we will add a brief clause citing the observed real-time performance. revision: yes
Circularity Check
No significant circularity
full rationale
The paper presents a two-stage planning framework (graph-based courteous behavior planner followed by comfort-optimized trajectory generation) and reports experimental validation of real-time capability. No equations, first-principles derivations, fitted parameters renamed as predictions, or load-bearing self-citations appear in the abstract or described claims. The work is a system-design contribution whose central assertions rest on implementation and testing rather than any mathematical reduction that could be circular by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Smooth path and speed planning for an automated public transport vehicle,
J. Villagra, V . Milans, J. Prez, and J. Godoy, “Smooth path and speed planning for an automated public transport vehicle,” Robotics and Autonomous Systems , vol. 60, no. 2, pp. 252 – 265, 2012. [Online]. Available: http://www.sciencedirect.com/science/article/pii/ S092188901100203X
work page 2012
-
[2]
Optimal trajectory generation for dynamic street scenarios in a fren x00e9;t frame,
M. Werling, J. Ziegler, S. Kammel, and S. Thrun, “Optimal trajectory generation for dynamic street scenarios in a fren x00e9;t frame,” in 2010 IEEE International Conference on Robotics and Automation , May 2010, pp. 987–993
work page 2010
-
[3]
Trajectory planning for bertha 2014; a local, continuous method,
J. Ziegler, P. Bender, T. Dang, and C. Stiller, “Trajectory planning for bertha 2014; a local, continuous method,” in 2014 IEEE Intelligent Vehicles Symposium Proceedings, June 2014, pp. 450–457
work page 2014
-
[4]
Autonomous driving at ulm university: A modular, robust, and sensor-independent fusion approach,
F. Kunz, D. Nuss, J. Wiest, H. Deusch, S. Reuter, F. Gritschneder, A. Scheel, M. Stbler, M. Bach, P. Hatzelmann, C. Wild, and K. Di- etmayer, “Autonomous driving at ulm university: A modular, robust, and sensor-independent fusion approach,” in 2015 IEEE Intelligent Vehicles Symposium (IV), June 2015, pp. 666–673
work page 2015
-
[5]
Interaction aware trajectory planning for merge scenarios in congested traffic situations,
N. Evestedt, E. Ward, J. Folkesson, and D. Axehill, “Interaction aware trajectory planning for merge scenarios in congested traffic situations,” in 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC) , Nov 2016, pp. 465–472
work page 2016
-
[6]
L. Sun, W. Zhan, M. Tomizuka, and A. D. Dragan, “Courteous autonomous cars,” arXiv preprint arXiv:1808.02633 , 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[7]
A generic driving strategy for urban environments,
C. Hubmann, M. Aeberhard, and C. Stiller, “A generic driving strategy for urban environments,” in 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC) , Nov 2016, pp. 1010– 1016
work page 2016
-
[8]
Spatiotemporal state lattices for fast tra- jectory planning in dynamic on-road driving scenarios,
J. Ziegler and C. Stiller, “Spatiotemporal state lattices for fast tra- jectory planning in dynamic on-road driving scenarios,” in 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, Oct 2009, pp. 1879–1884
work page 2009
-
[9]
Towards risk minimizing trajectory planning in on-road scenarios,
E. Ward and J. Folkesson, “Towards risk minimizing trajectory planning in on-road scenarios,” in 2018 IEEE Intelligent Vehicles Symposium (IV), June 2018, pp. 490–497
work page 2018
-
[10]
Probabilistic decision- making under uncertainty for autonomous driving using continuous pomdps,
S. Brechtel, T. Gindele, and R. Dillmann, “Probabilistic decision- making under uncertainty for autonomous driving using continuous pomdps,” in 17th International IEEE Conference on Intelligent Trans- portation Systems (ITSC) , Oct 2014, pp. 392–399
work page 2014
-
[11]
C. Hubmann, J. Schulz, M. Becker, D. Althoff, and C. Stiller, “Au- tomated driving in uncertain environments: Planning with interaction and uncertain maneuver prediction,” IEEE Transactions on Intelligent Vehicles, vol. 3, no. 1, pp. 5–17, March 2018
work page 2018
-
[12]
Intention-aware online pomdp planning for autonomous driving in a crowd,
H. Bai, S. Cai, N. Ye, D. Hsu, and W. S. Lee, “Intention-aware online pomdp planning for autonomous driving in a crowd,” in 2015 IEEE International Conference on Robotics and Automation (ICRA) , May 2015, pp. 454–460
work page 2015
-
[13]
Congested traffic states in empirical observations and microscopic simulations,
M. Treiber, A. Hennecke, and D. Helbing, “Congested traffic states in empirical observations and microscopic simulations,” Physical review E, vol. 62, no. 2, p. 1805, 2000
work page 2000
-
[14]
S. J. Russell and P. Norvig, Artificial intelligence: a modern approach. Malaysia; Pearson Education Limited,, 2016
work page 2016
-
[15]
Discrete optimal search library (dosl): A template- based c++ library for discrete optimal search,
S. Bhattacharya, “Discrete optimal search library (dosl): A template- based c++ library for discrete optimal search,” 2017. [Online]. Available: https://github.com/subh83/DOSL
work page 2017
-
[16]
S. Liu, “An on-line reference-trajectory generator for smooth mo- tion of impulse-controlled industrial manipulators,” in 7th Interna- tional Workshop on Advanced Motion Control. Proceedings (Cat. No.02TH8623), July 2002, pp. 365–370
work page 2002
-
[17]
Optimal tra- jectories for highly automated driving,
C. Rathgeber, F. Winkler, X. Kang, and S. M ¨uller, “Optimal tra- jectories for highly automated driving,” World Academy of Science, Engineering and Technology, International Journal of Mechanical, Aerospace, Industrial, Mechatronic and Manufacturing Engineering , vol. 9, no. 6, pp. 969–975, 2015
work page 2015
-
[18]
Coincar-sim: An open-source simulation framework for cooperatively interacting automobiles,
M. Naumann, F. Poggenhans, M. Lauer, and C. Stiller, “Coincar-sim: An open-source simulation framework for cooperatively interacting automobiles,” in IEEE Intl. Conf. Intelligent Vehicles , 2018
work page 2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.