Localization in Ultra Narrow Band IoT Networks: Design Guidelines and Trade-Offs
Pith reviewed 2026-05-24 15:46 UTC · model grok-4.3
The pith
A handful of GPS sensors let machine learning classify IoT device locations at 80 percent accuracy using only RSSI in ultra-narrowband networks.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
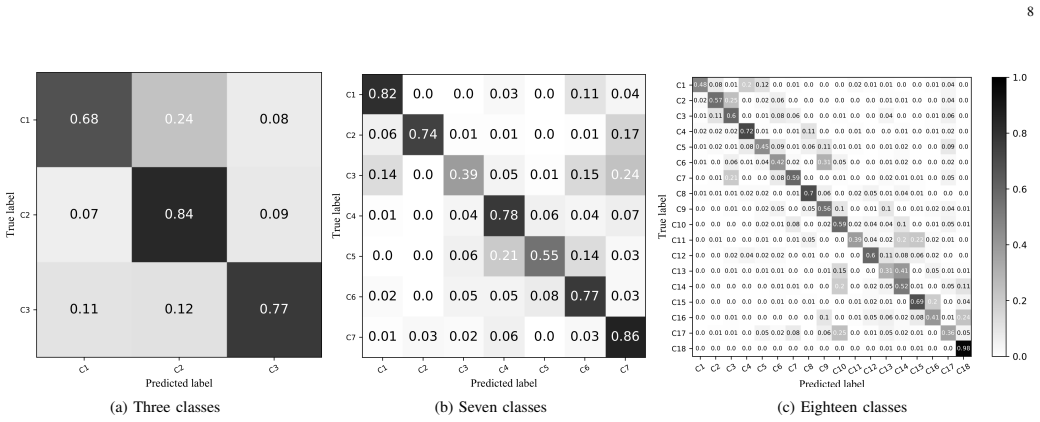
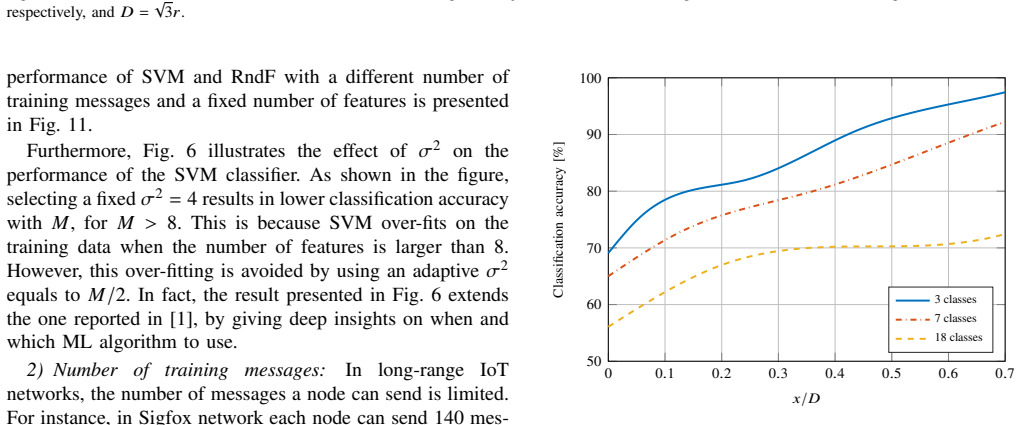
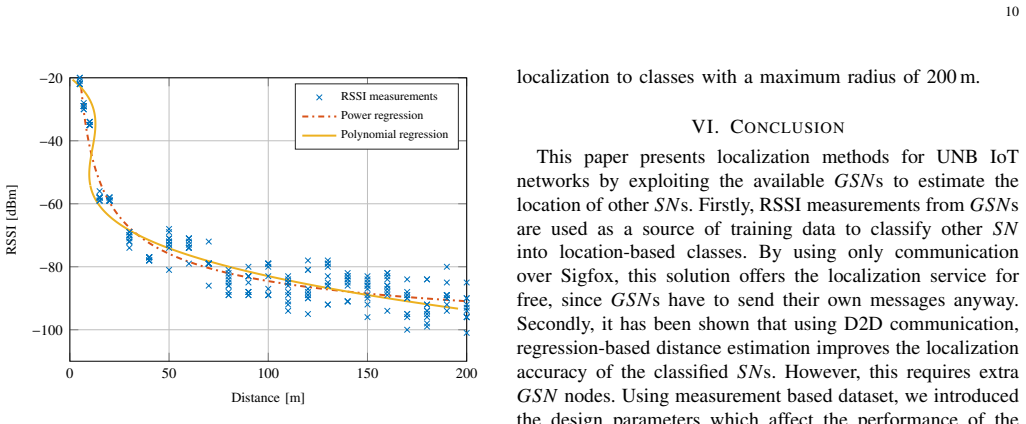
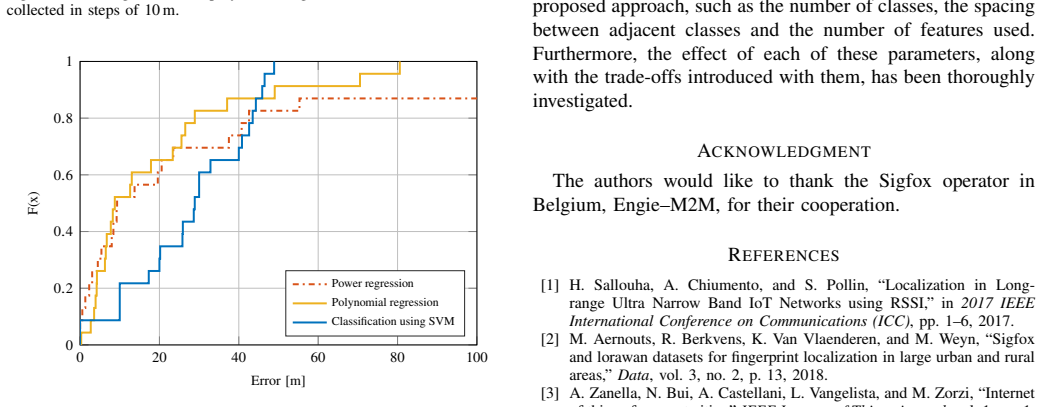
Splitting the service area into classes via a sparse set of GPS-enabled sensors (GSNs) produces repeatable RSSI fingerprints that standard classifiers can map to the correct class for ordinary sensors (SNs). This yields 80 percent classification accuracy for seven classes across a 2.5 km radius city and 92 percent when class spacing is increased; when GSN density permits device-to-device communication, multilateration improves the probability of sub-20 m error by 40 percent in the measured scenario.
What carries the argument
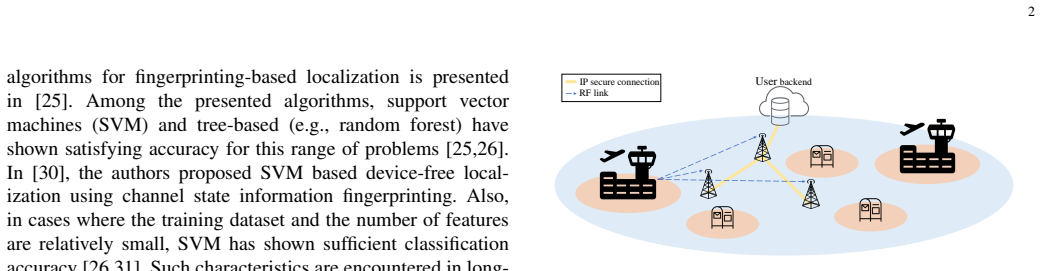
RSSI fingerprinting with machine-learning classifiers trained on signals received at a small number of GPS-enabled sensors to assign location classes to standard sensors.
If this is right
- Classification accuracy reaches 80 percent when a 2.5 km radius city is divided into seven classes.
- Increasing physical spacing between classes raises accuracy to 92 percent on the measured data.
- Multilateration among densely placed GPS sensors improves the probability of localization error below 20 m by 40 percent.
- The method requires no added payload, power, or hardware on the standard sensors.
- Performance is validated on a real city-scale dataset collected in Antwerp.
Where Pith is reading between the lines
- The same class-based fingerprinting could be tested in other long-range low-power networks to see whether similar accuracy holds without network-specific tuning.
- Optimal class count and spacing might be derived analytically from city size and expected path-loss variation rather than chosen empirically.
- Combining the RSSI classifier output with occasional coarse timing or angle information could further tighten the error distribution in sparse deployments.
- If class boundaries are allowed to move over time, the approach might adapt to seasonal changes in propagation without retraining the entire model.
Load-bearing premise
The RSSI values collected from the GPS sensors produce sufficiently distinct and repeatable fingerprints within each class so that standard machine learning classifiers can reliably map new measurements to the correct class.
What would settle it
Collecting fresh RSSI traces at the same Antwerp locations and finding that the fingerprints no longer separate the seven classes at better than 70 percent accuracy would falsify the central performance claim.
Figures








read the original abstract
Localization in long-range Internet of Things networks is a challenging task, mainly due to the long distances and low bandwidth used. Moreover, the cost, power, and size limitations restrict the integration of a GPS receiver in each device. In this work, we introduce a novel received signal strength indicator (RSSI) based localization solution for ultra narrow band (UNB) long-range IoT networks such as Sigfox. The essence of our approach is to leverage the existence of a few GPS-enabled sensors (GSNs) in the network to split the wide coverage into classes, enabling RSSI based fingerprinting of other sensors (SNs). By using machine learning algorithms at the network backed-end, the proposed approach does not impose extra power, payload, or hardware requirements. To comprehensively validate the performance of the proposed method, a measurement-based dataset that has been collected in the city of Antwerp is used. We show that a location classification accuracy of 80% is achieved by virtually splitting a city with a radius of 2.5 km into seven classes. Moreover, separating classes, by increasing the spacing between them, brings the classification accuracy up-to 92% based on our measurements. Furthermore, when the density of GSN nodes is high enough to enable device-to-device communication, using multilateration, we improve the probability of localizing SNs with an error lower than 20 m by 40% in our measurement scenario.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an RSSI-based fingerprinting approach for localization in ultra-narrowband IoT networks (e.g., Sigfox) that uses a small number of GPS-enabled sensors (GSNs) to partition coverage into classes; machine-learning classifiers at the backend map sensor-node (SN) RSSI vectors to these classes. On a measurement dataset collected in Antwerp, the method achieves 80% classification accuracy when virtually partitioning a 2.5 km radius city into seven classes; accuracy rises to 92% when class spacing is increased. When GSN density permits device-to-device links, multilateration is shown to raise the probability of localizing an SN with error below 20 m by 40%.
Significance. If the reported measurement results hold under proper validation, the work supplies concrete, deployment-relevant guidelines and trade-offs for RSSI fingerprinting in long-range UNB networks without imposing extra hardware, power, or payload costs on the majority of nodes. The Antwerp campaign and the explicit comparison of class-spacing versus multilateration regimes constitute the primary empirical contribution.
major comments (3)
- [Abstract, §4] Abstract and §4 (results): the headline claim that accuracy reaches 92% 'by increasing the spacing between them' is obtained via post-hoc adjustment of class boundaries. The manuscript must state whether class boundaries were chosen using only training data, whether the adjustment was performed once on the full dataset, and whether any form of nested cross-validation was used; otherwise the 92% figure risks optimistic bias.
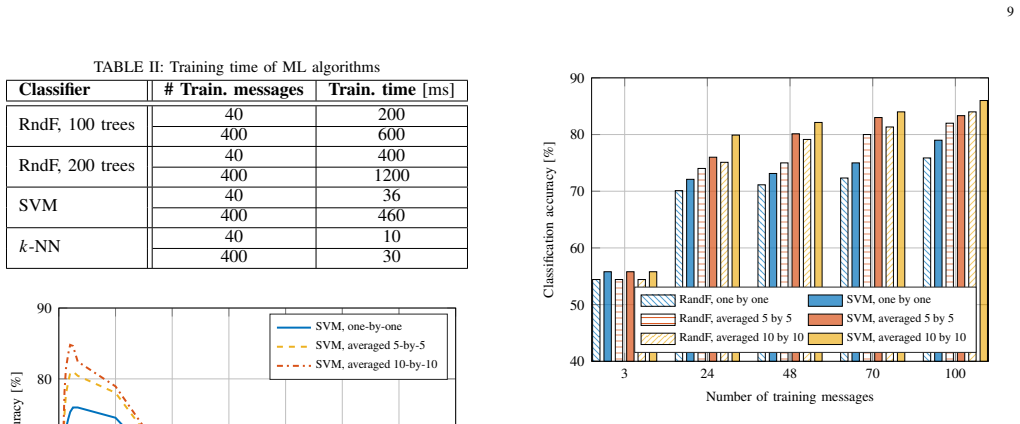
- [Abstract, §3] Abstract and §3 (methodology): no error bars, confidence intervals, or details on the number of folds, random seeds, or hyper-parameter search are supplied for the 80% and 92% classification accuracies, nor for the 40% multilateration improvement. Standard practice requires at least k-fold cross-validation statistics and a description of the ML classifier family and its tuning procedure.
- [§5] §5 (multilateration scenario): the 40% improvement in P(error < 20 m) is conditioned on 'density of GSN nodes high enough to enable device-to-device communication.' The paper should quantify the minimum GSN density, the D2D range assumption, and the exact multilateration algorithm (e.g., least-squares, weighted) together with the number of participating GSNs per SN.
minor comments (2)
- [Figures 3-6] Figure captions and axis labels should explicitly state the number of GSNs used for each fingerprint and the train/test split ratio.
- [Abstract] The abstract states 'virtually splitting a city with a radius of 2.5 km into seven classes' without indicating how the class centroids or boundaries were initially placed; a short description or reference to the placement algorithm would improve reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which help strengthen the clarity and statistical rigor of the manuscript. We respond to each major comment below.
read point-by-point responses
-
Referee: [Abstract, §4] Abstract and §4 (results): the headline claim that accuracy reaches 92% 'by increasing the spacing between them' is obtained via post-hoc adjustment of class boundaries. The manuscript must state whether class boundaries were chosen using only training data, whether the adjustment was performed once on the full dataset, and whether any form of nested cross-validation was used; otherwise the 92% figure risks optimistic bias.
Authors: The 92% figure was produced by increasing class spacing on the full measurement dataset to illustrate the associated trade-off. We will revise the text to state explicitly that the adjustment used the complete dataset once, without nested cross-validation, and to note the exploratory character of this result. The core 80% accuracy result relies on a fixed, predefined partitioning and will be presented with the requested validation details. revision: yes
-
Referee: [Abstract, §3] Abstract and §3 (methodology): no error bars, confidence intervals, or details on the number of folds, random seeds, or hyper-parameter search are supplied for the 80% and 92% classification accuracies, nor for the 40% multilateration improvement. Standard practice requires at least k-fold cross-validation statistics and a description of the ML classifier family and its tuning procedure.
Authors: We will augment the manuscript with error bars and confidence intervals on all reported figures. The revised version will specify the cross-validation procedure (including the number of folds), the random seeds employed, the machine-learning classifier families, and the hyper-parameter search method used for both the classification and multilateration experiments. revision: yes
-
Referee: [§5] §5 (multilateration scenario): the 40% improvement in P(error < 20 m) is conditioned on 'density of GSN nodes high enough to enable device-to-device communication.' The paper should quantify the minimum GSN density, the D2D range assumption, and the exact multilateration algorithm (e.g., least-squares, weighted) together with the number of participating GSNs per SN.
Authors: We will expand §5 to report the minimum GSN density at which D2D links were observed in the Antwerp campaign, the D2D range assumption derived from the measurements, the multilateration algorithm (least-squares), and the average number of GSNs participating per SN in the evaluated scenario. revision: yes
Circularity Check
No significant circularity; results are empirical measurements
full rationale
The paper reports location classification accuracies (80-92%) and multilateration improvements (40%) directly from a measurement campaign on the Antwerp dataset using standard RSSI fingerprinting and machine learning classifiers. No equations, derivations, or fitted parameters are presented that reduce by construction to the inputs; the central claims rest on external data collection and off-the-shelf ML rather than self-referential definitions or self-citation chains. The approach is self-contained against the stated measurement benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption RSSI measurements from GSNs yield class-distinct fingerprints that ML classifiers can exploit for SN localization
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We show that a location classification accuracy of 80% is achieved by virtually splitting a city with a radius of 2.5 km into seven classes... using multilateration, we improve the probability of localizing SNs with an error lower than 20 m by 40%
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
the RSSI values collected from the GSNs produce sufficiently distinct and repeatable fingerprints within each class such that standard machine learning classifiers can reliably map SN measurements
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Localization in Long- range Ultra Narrow Band IoT Networks using RSSI,
H. Sallouha, A. Chiumento, and S. Pollin, “Localization in Long- range Ultra Narrow Band IoT Networks using RSSI,” in 2017 IEEE International Conference on Communications (ICC) , pp. 1–6, 2017
work page 2017
-
[2]
Sigfox and lorawan datasets for fingerprint localization in large urban and rural areas,
M. Aernouts, R. Berkvens, K. Van Vlaenderen, and M. Weyn, “Sigfox and lorawan datasets for fingerprint localization in large urban and rural areas,” Data, vol. 3, no. 2, p. 13, 2018
work page 2018
-
[3]
Internet of things for smart cities,
A. Zanella, N. Bui, A. Castellani, L. Vangelista, and M. Zorzi, “Internet of things for smart cities,” IEEE Internet of Things journal, vol. 1, no. 1, pp. 22–32, 2014
work page 2014
-
[4]
Location of things (lot): A review and taxonomy of sensors localization in iot infrastructure,
R. C. Shit, S. Sharma, D. Puthal, and A. Y . Zomaya, “Location of things (lot): A review and taxonomy of sensors localization in iot infrastructure,” IEEE Communications Surveys & Tutorials , vol. 20, no. 3, pp. 2028–2061, 2018
work page 2028
-
[5]
ulora: Ultra low-power, low-cost and open platform for the lora networks,
H. Sallouha, B. Van den Bergh, Q. Wang, and S. Pollin, “ulora: Ultra low-power, low-cost and open platform for the lora networks,” in 4th ACM Workshop HotWireless ’17, pp. 43–47, 2017
work page 2017
-
[6]
Sigfox: http://www.sigfox.com, [online] Accessed on: Jan. 2019
work page 2019
-
[7]
Weightless-P: http://www.weightless.org/, [online] Accessed on: Jan. 2019
work page 2019
-
[8]
alliance: http://lora-alliance.org, [online] Accessed on: Jan
L. alliance: http://lora-alliance.org, [online] Accessed on: Jan. 2019
work page 2019
-
[9]
NB-IoT: https://goo.gl/DaUHkV, [online] Accessed on: Jan. 2019
work page 2019
-
[10]
Localization via ultra-wideband radios: a look at positioning aspects for future sensor networks,
S. Gezici et al. , “Localization via ultra-wideband radios: a look at positioning aspects for future sensor networks,” IEEE signal processing magazine, vol. 22, no. 4, pp. 70–84, 2005
work page 2005
-
[11]
Wireless rssi fingerprinting localization,
S. Yiu et al., “Wireless rssi fingerprinting localization,” Signal Process- ing, vol. 131, pp. 235–244, 2017
work page 2017
-
[12]
Base station ordering for emergency call localization in ultra-dense cellular networks,
H. Elsawy, W. Dai, M.-S. Alouini, and M. Z. Win, “Base station ordering for emergency call localization in ultra-dense cellular networks,” IEEE Access, vol. 6, pp. 301–315, 2018
work page 2018
-
[13]
A theoretical foundation of network localization and navigation,
M. Z. Win, Y . Shen, and W. Dai, “A theoretical foundation of network localization and navigation,” Proceedings of the IEEE , vol. 106, no. 7, pp. 1136–1165, 2018
work page 2018
-
[14]
Mercury: An infrastructure-free system for network localization and navigation,
Z. Liu, W. Dai, and M. Z. Win, “Mercury: An infrastructure-free system for network localization and navigation,” IEEE Transactions on Mobile Computing, vol. 17, no. 5, pp. 1119–1133, 2018
work page 2018
-
[15]
Network localization and navigation via cooperation,
M. Z. Win, A. Conti, S. Mazuelas, Y . Shen, W. M. Gifford, D. Dardari, and M. Chiani, “Network localization and navigation via cooperation,” IEEE Communications Magazine , vol. 49, no. 5, pp. 56–62, 2011
work page 2011
-
[16]
Network op- eration strategies for efficient localization and navigation,
M. Z. Win, W. Dai, Y . Shen, G. Chrisikos, and H. V . Poor, “Network op- eration strategies for efficient localization and navigation,” Proceedings of the IEEE , vol. 106, no. 7, pp. 1224–1254, 2018. 11
work page 2018
-
[17]
M. Z. Win, F. Meyer, Z. Liu, W. Dai, S. Bartoletti, and A. Conti, “Efficient multisensor localization for the internet of things: Exploring a new class of scalable localization algorithms,” IEEE Signal Processing Magazine, vol. 35, no. 5, pp. 153–167, 2018
work page 2018
-
[18]
Nextme: Localization using cellular traces in internet of things.,
D. Zhang, S. Zhao, L. T. Yang, M. Chen, Y . Wang, and H. Liu, “Nextme: Localization using cellular traces in internet of things.,” IEEE Trans. Industrial Informatics, vol. 11, no. 2, pp. 302–312, 2015
work page 2015
-
[19]
Indoor positioning: A key enabling technology for iot applications,
D. Macagnano, G. Destino, and G. Abreu, “Indoor positioning: A key enabling technology for iot applications,” in Internet of Things (WF- IoT), 2014 IEEE World Forum on , pp. 117–118, IEEE, 2014
work page 2014
-
[20]
Location of things (lot): A review and taxonomy of sensors localization in iot infrastructure,
R. C. Shit, S. Sharma, D. Puthal, and A. Y . Zomaya, “Location of things (lot): A review and taxonomy of sensors localization in iot infrastructure,” IEEE Communications Surveys & Tutorials , 2018
work page 2018
-
[21]
M. Kwak et al., “An energy-efficient and lightweight indoor localization system for internet-of-things (iot) environments,” ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies , vol. 2, no. 1, p. 17, 2018
work page 2018
-
[22]
J. Zhang, G. Han, N. Sun, and L. Shu, “Path-loss-based fingerprint lo- calization approach for location-based services in indoor environments,” IEEE Access, vol. 5, pp. 13756–13769, 2017
work page 2017
-
[23]
Indoor localization for iot applica- tions using fingerprinting,
P. Fonseka and K. Sandrasegaran, “Indoor localization for iot applica- tions using fingerprinting,” in IEEE World Forum on Internet of Things, WF-IoT 2018, 2018
work page 2018
-
[24]
Csi amplitude fingerprinting-based nb-iot indoor local- ization,
Q. Song et al., “Csi amplitude fingerprinting-based nb-iot indoor local- ization,” IEEE Internet of Things Journal , vol. 5, no. 3, 2018
work page 2018
-
[25]
A comparative study on machine learning algorithms for indoor positioning,
S. Bozkurt et al., “A comparative study on machine learning algorithms for indoor positioning,” in International Symposium on Innovations in Intelligent SysTems and Applications (INISTA) , pp. 1–8, IEEE, 2015
work page 2015
-
[26]
Support vector machines for indoor sensor localization,
W. Farjow, A. Chehri, M. Hussein, and X. Fernando, “Support vector machines for indoor sensor localization,” in 2011 IEEE Wireless Com- munications and Networking Conference , pp. 779–783, IEEE, 2011
work page 2011
-
[27]
Gaussian process regression for fingerprinting based localization,
S. Kumar et al. , “Gaussian process regression for fingerprinting based localization,” Ad Hoc Networks , vol. 51, pp. 1–10, 2016
work page 2016
-
[28]
R. C. Shit et al., “Ubiquitous localization (ubiloc): A survey and taxon- omy on device free localization for smart world,” IEEE Communications Surveys & Tutorials, 2019
work page 2019
-
[29]
Probabilistic rss fingerprinting for localization in smart platforms,
R. C. Shit, S. Sharma, D. Puthal, and S. S. Tripathi, “Probabilistic rss fingerprinting for localization in smart platforms,” in 2018 International Conference on Information Technology (ICIT) , pp. 254–259, IEEE, 2018
work page 2018
-
[30]
Device-free presence detection and localization with svm and csi fingerprinting,
R. Zhou, X. Lu, P. Zhao, and J. Chen, “Device-free presence detection and localization with svm and csi fingerprinting,”IEEE Sensors Journal, vol. 17, no. 23, pp. 7990–7999, 2017
work page 2017
-
[31]
Localization in wireless sensor networks based on support vector machines,
D. A. Tran and T. Nguyen, “Localization in wireless sensor networks based on support vector machines,” IEEE Transactions on Parallel and Distributed Systems, vol. 19, no. 7, pp. 981–994, 2008
work page 2008
-
[32]
Towards location enhanced iot: Characterization of lora signal for wide area localization,
Y . Liy, Z. He, Y . Li, H. Xu, L. Pei, and Y . Zhang, “Towards location enhanced iot: Characterization of lora signal for wide area localization,” in 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS), pp. 1–7, IEEE, 2018
work page 2018
-
[33]
X. Wang, Z. Qian, X. Wang, and L. Huang, “Robust localization for cognitive iot via the mobile anchor node based on the diameter-varying spiral line,” IEEE Access, vol. 7, pp. 28487–28497, 2019
work page 2019
-
[34]
Energy-constrained uav trajectory design for ground node localization,
H. Sallouha, M. M. Azari, and S. Pollin, “Energy-constrained uav trajectory design for ground node localization,” in 2018 IEEE Global Communications Conference (GLOBECOM) , pp. 1–7, IEEE, 2018
work page 2018
-
[35]
Localization in low power wide area networks using wi-fi fingerprints,
T. Janssen, M. Weyn, and R. Berkvens, “Localization in low power wide area networks using wi-fi fingerprints,” Applied Sciences, vol. 7, no. 9, p. 936, 2017
work page 2017
-
[36]
A comparison of signal strength localization methods with sigfox,
M. Aernouts et al. , “A comparison of signal strength localization methods with sigfox,” in 15th WPNC, pp. 1–6, IEEE, 2018
work page 2018
-
[37]
TD: https://github.com/Telecom-Design/Documentation TD, [online] Accessed on: Jan. 2019
work page 2019
-
[38]
Range and coexistence analysis of long range unlicensed communication,
B. Reynders, W. Meert, and S. Pollin, “Range and coexistence analysis of long range unlicensed communication,” in Telecommunications (ICT), 2016 23rd International Conference on , pp. 1–6, IEEE, 2016
work page 2016
-
[39]
Scikit-learn: Machine learning in Python,
F. Pedregosa et al., “Scikit-learn: Machine learning in Python,” Journal of Machine Learning Research , vol. 12, pp. 2825–2830, 2011
work page 2011
-
[40]
I. Ahmad, M. Basheri, M. Iqbal, and A. Raheem, “Performance com- parison of support vector machine, random forest, and extreme learning machine for intrusion detection,” IEEE Access, 2018
work page 2018
-
[41]
Gaussian process regression for csi and feedback estimation in lte,
A. Chiumento et al., “Gaussian process regression for csi and feedback estimation in lte,” in 2015 IEEE International Conference on Commu- nication Workshop (ICCW), pp. 1440–1445, June 2015
work page 2015
-
[42]
Adaptive CSI and feedback estimation in LTE and beyond: a Gaussian process regression approach,
A. Chiumento et al., “Adaptive CSI and feedback estimation in LTE and beyond: a Gaussian process regression approach,” EURASIP Journal on Wireless Communications and Networking , vol. 2015, p. 168, Jun 201
work page 2015
-
[43]
Indoor localization using improved rss-based lateration methods,
J. Yang and Y . Chen, “Indoor localization using improved rss-based lateration methods,” in Global Telecommunications Conference, 2009. GLOBECOM 2009. IEEE , pp. 1–6, IEEE, 2009
work page 2009
-
[44]
Preventing over-fitting during model selection via bayesian regularisation of the hyper-parameters,
G. C. Cawley and N. L. Talbot, “Preventing over-fitting during model selection via bayesian regularisation of the hyper-parameters,” Journal of Machine Learning Research , vol. 8, no. Apr, pp. 841–861, 2007
work page 2007
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.