Provably-Correct Safety Protocol for Cooperative Platooning
Pith reviewed 2026-05-24 05:01 UTC · model grok-4.3
The pith
A safety protocol guarantees collision-free cooperative platooning by sharing braking data even when messages fail to arrive.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The safety protocol prevents collisions in a provably-correct manner for a class of CACC systems while maintaining small inter-vehicle distances by utilizing communicated braking capabilities, and the safety holds despite possible communication failures.
What carries the argument
The safety protocol that incorporates communicated braking capabilities to enforce safe following distances and actions.
If this is right
- Platoons can maintain smaller gaps without increasing collision risk.
- Safety guarantees apply even when some communication messages are lost.
- The protocol integrates with existing consensus-based CACC designs.
- Evaluation on benchmark scenarios shows applicability to various platoon situations.
Where Pith is reading between the lines
- The approach could extend to non-platoon cooperative driving where vehicles share capability data.
- It might allow denser traffic flows on highways if the braking assumptions hold in practice.
- Real-vehicle implementation would require verifying that braking data remains valid after delays.
Load-bearing premise
The protocol is developed only for CACC systems where vehicles successively agree on consensus behavior and where communicated braking capabilities remain usable when messages arrive.
What would settle it
A test case in which a vehicle brakes harder than its last communicated capability and a collision occurs after a message loss despite the protocol being active.
Figures


read the original abstract
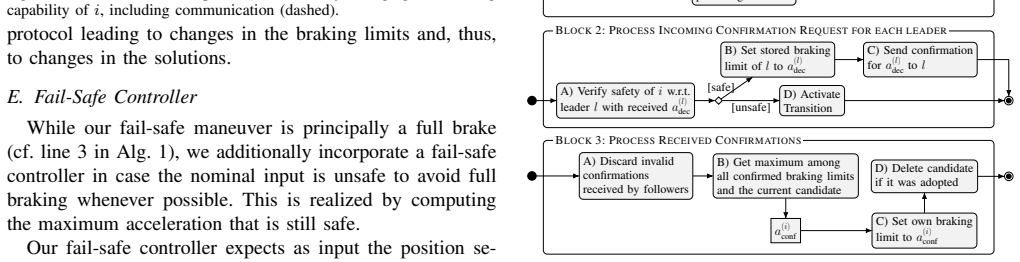
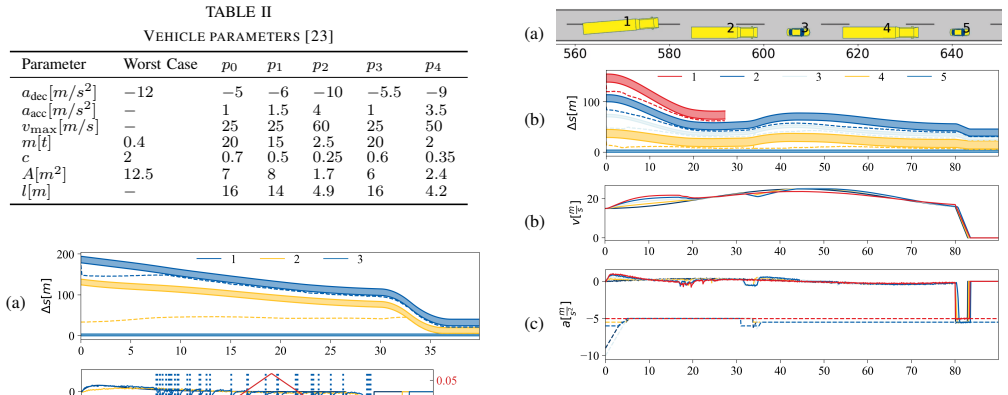
Cooperative Adaptive Cruise Control (CACC) is a well-studied technology for forming string-stable vehicle platoons. Ensuring collision avoidance is particularly difficult in CACC due to the small desired inter-vehicle spacing. We propose a safety protocol preventing collisions in a provably-correct manner while still maintaining a small distance to the preceding vehicle, by utilizing communicated braking capabilities. In addition, the safety of the protocol is ensured despite possible communication failures. While our concept can be applied to any CACC system, we particularly consider a class of CACCs, where the platoon vehicles successively agree on a consensus behavior. Our safety protocol is evaluated on various scenarios using the CommonRoad benchmark suite.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a safety protocol for cooperative adaptive cruise control (CACC) platoons that prevents collisions in a provably correct manner while maintaining small inter-vehicle distances by utilizing communicated braking capabilities. The protocol is designed for consensus-based CACC systems and is claimed to remain safe despite communication failures; it is evaluated on various scenarios from the CommonRoad benchmark suite.
Significance. If the provable correctness and robustness claims hold under a well-specified failure model, the work would provide a useful formal approach to collision avoidance in platoons with tight spacing, addressing a practical barrier to CACC deployment.
major comments (2)
- [Abstract] Abstract: the central claim of 'provably-correct' safety and collision avoidance is asserted without any proof outline, model assumptions, verification steps, or theorem statement, so the claim cannot be evaluated from the manuscript.
- The robustness claim under communication failures rests on the unstated assumption that 'communicated braking capabilities remain usable when messages arrive'; without an explicit failure model (omission vs. delay, corruption, or inconsistent views), it is impossible to verify whether the inductive invariant or safety guarantee survives the modeled faults.
minor comments (1)
- The evaluation on CommonRoad should report quantitative metrics (e.g., minimum observed spacing, collision counts, and string-stability measures) rather than qualitative scenario descriptions.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the two major comments below. The manuscript already contains the formal model, inductive invariant, and safety theorem in Sections 3–4, but we agree the abstract and failure-model presentation can be strengthened for clarity.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim of 'provably-correct' safety and collision avoidance is asserted without any proof outline, model assumptions, verification steps, or theorem statement, so the claim cannot be evaluated from the manuscript.
Authors: The abstract is a concise summary; the full manuscript contains the required elements. Section 2.2 states the system model and assumptions (continuous-time double-integrator dynamics, bounded braking, and the consensus CACC law). Section 3 defines the inductive invariant and proves safety via Theorem 1, which states that if the initial state satisfies the invariant and the protocol is followed, inter-vehicle distance remains positive. Verification steps are given by the inductive proof in Section 3.3. We have revised the abstract to include a one-sentence proof outline and reference to Theorem 1. revision: yes
-
Referee: [—] The robustness claim under communication failures rests on the unstated assumption that 'communicated braking capabilities remain usable when messages arrive'; without an explicit failure model (omission vs. delay, corruption, or inconsistent views), it is impossible to verify whether the inductive invariant or safety guarantee survives the modeled faults.
Authors: We accept that the failure model was stated only implicitly. The protocol assumes that any received message is authentic and contains the sender’s correct braking capability (no corruption or Byzantine behavior). Failures are limited to omissions and bounded delays; the safety proof in Section 3.4 shows that the invariant is preserved because each vehicle falls back to its locally computed worst-case braking when a message is missing. We have added an explicit failure-model subsection (new Section 2.3) that enumerates the considered faults and states the assumptions under which the inductive invariant holds. revision: yes
Circularity Check
No circularity; safety claims rest on external communication model and consensus assumptions
full rationale
The abstract and description tie provable collision avoidance to communicated braking capabilities and an explicit assumption that 'communicated braking capabilities remain usable when messages arrive' under a class of consensus-based CACC systems. No equations, fitted parameters, or self-citations are presented that reduce the safety invariant to a definition of itself or to a prior result by the same authors. The protocol is evaluated on external CommonRoad benchmarks rather than internally generated data. This satisfies the default expectation of a self-contained derivation against stated external assumptions.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Safety in Vehicle Platooning: A Systematic Literature Review,
J. Axelsson, “Safety in Vehicle Platooning: A Systematic Literature Review,” IEEE Transactions on Intelligent Transportation Systems , vol. 18, no. 5, pp. 1033–1045, 2017
work page 2017
-
[2]
An adaptive approach to longi- tudinal platooning with heterogeneous vehicle saturations,
T. Tao, V . Jain, and S. Baldi, “An adaptive approach to longi- tudinal platooning with heterogeneous vehicle saturations,” IFAC- PapersOnLine, vol. 52, no. 3, pp. 7–12, 2019
work page 2019
-
[3]
S. Baldi, D. Liu, V . Jain, and W. Yu, “Establishing Platoons of Bidirectional Cooperative Vehicles With Engine Limits and Uncertain Dynamics,” IEEE Transactions on Intelligent Transportation Systems , vol. 22, no. 5, pp. 2679–2691, 2021
work page 2021
-
[4]
D. Liu, S. Mair, K. Yang, S. Baldi, P. Frasca, and M. Althoff, “Resilience in Platoons of Cooperative Heterogeneous Vehicles: Self-organization Strategies and Provably-correct Design.” [Online]. Available: https://arxiv.org/abs/2305.17443
-
[5]
Safe and Efficient Coop- erative Platooning,
S. Thormann, A. Schirrer, and S. Jakubek, “Safe and Efficient Coop- erative Platooning,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 2, pp. 1368–1380, 2022
work page 2022
-
[6]
K. C. Dey, et al. , “A Review of Communication, Driver Character- istics, and Controls Aspects of Cooperative Adaptive Cruise Control (CACC),” IEEE Transactions on Intelligent Transportation Systems , vol. 17, no. 2, pp. 491–509, 2016
work page 2016
-
[7]
Safe Platooning in Automated Highway Systems Part I: Safety Regions Design,
L. Alvarez and R. Horowitz, “Safe Platooning in Automated Highway Systems Part I: Safety Regions Design,” Vehicle System Dynamics , vol. 32, no. 1, pp. 23–55, 1999
work page 1999
-
[8]
N. Mehdipour, M. Althoff, R. D. Tebbens, and C. Belta, “Formal methods to comply with rules of the road in autonomous driving: State of the art and grand challenges,” Automatica, vol. 152, 2023
work page 2023
-
[9]
Safe longitudinal platoons of vehicles without communication,
A. Scheuer, O. Simonin, and F. Charpillet, “Safe longitudinal platoons of vehicles without communication,” inIEEE International Conference on Robotics and Automation , 2009, pp. 70–75
work page 2009
-
[10]
A. Khalifa, O. Kermorgant, S. Dominguez, and P. Martinet, “Vehi- cles Platooning in Urban Environments: Integrated Consensus-based Longitudinal Control with Gap Closure Maneuvering and Collision Avoidance Capabilities,” in 18th European Control Conference, 2019, pp. 1695–1701
work page 2019
-
[11]
A. Alam, A. Gattami, K. H. Johansson, and C. J. Tomlin, “Guarantee- ing safety for heavy duty vehicle platooning: Safe set computations and experimental evaluations,” Control Engineering Practice, vol. 24, pp. 33–41, 2014
work page 2014
-
[12]
Online Verification of Automated Road Vehicles Using Reachability Analysis,
M. Althoff and J. M. Dolan, “Online Verification of Automated Road Vehicles Using Reachability Analysis,” IEEE Transactions on Robotics, vol. 30, no. 4, pp. 903–918, 2014
work page 2014
-
[13]
Adaptive Cruise Control with Safety Guarantees for Autonomous Vehicles,
S. Magdici and M. Althoff, “Adaptive Cruise Control with Safety Guarantees for Autonomous Vehicles,” IFAC-PapersOnLine, vol. 50, no. 1, pp. 5774–5781, 2017
work page 2017
-
[14]
Controller Design for Cooperative Driving with Guaranteed Safe Behavior,
J. Ligthart, E. Semsar-Kazerooni, J. Ploeg, M. Alirezaei, and H. Ni- jmeijer, “Controller Design for Cooperative Driving with Guaranteed Safe Behavior,” in IEEE Conference on Control Technology and Applications, 2018, pp. 1460–1465
work page 2018
-
[15]
Provably-Correct and Com- fortable Adaptive Cruise Control,
M. Althoff, S. Maierhofer, and C. Pek, “Provably-Correct and Com- fortable Adaptive Cruise Control,” IEEE Transactions on Intelligent Vehicles, vol. 6, no. 1, pp. 159–174, 2021
work page 2021
-
[16]
CommonRoad: Compos- able benchmarks for motion planning on roads,
M. Althoff, M. Koschi, and S. Manzinger, “CommonRoad: Compos- able benchmarks for motion planning on roads,” in IEEE Intelligent Vehicles Symposium, 2017, pp. 719–726
work page 2017
-
[17]
For- malization of Interstate Traffic Rules in Temporal Logic,
S. Maierhofer, A.-K. Rettinger, E. C. Mayer, and M. Althoff, “For- malization of Interstate Traffic Rules in Temporal Logic,” in IEEE Intelligent Vehicles Symposium, 2020, pp. 752–759
work page 2020
- [18]
-
[19]
Ensuring drivability of planned motions using formal methods,
B. Schurmann, D. Hes, J. Eilbrecht, O. Stursberg, F. Koster, and M. Al- thoff, “Ensuring drivability of planned motions using formal methods,” in IEEE 20th International Conference on Intelligent Transportation Systems, Yokohama, 2017, pp. 1–8
work page 2017
-
[20]
Using online verification to prevent autonomous vehicles from causing accidents,
C. Pek, S. Manzinger, M. Koschi, and M. Althoff, “Using online verification to prevent autonomous vehicles from causing accidents,” Nature Machine Intelligence , vol. 2, no. 9, pp. 518–528, 2020
work page 2020
-
[21]
D. Angeli and E. Sontag, “Monotone control systems,” IEEE Trans- actions on Automatic Control , vol. 48, 2003
work page 2003
-
[22]
Automotive Radar Signal Processing: Research Directions and Practical Challenges,
F. Engels, P. Heidenreich, M. Wintermantel, L. Stäcker, M. Al Kadi, and A. M. Zoubir, “Automotive Radar Signal Processing: Research Directions and Practical Challenges,” IEEE Journal of Selected Topics in Signal Processing , vol. 15, no. 4, pp. 865–878, June 2021
work page 2021
-
[23]
S. Pischinger and U. Seiffert, Eds., Vieweg Handbuch Kraft- fahrzeugtechnik. Wiesbaden: Springer Fachmedien Wiesbaden, 2021
work page 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.