Neural-Geometric Tunnel Traversal: Localization-free UAV Flight with Tilted LiDARs
Pith reviewed 2026-05-24 02:02 UTC · model grok-4.3
The pith
Tilted LiDAR returns fed to a neural network for yaw plus geometry for safe position let UAVs traverse tunnels without localization or maps.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Processing LiDAR data through a deep neural network yields the UAV yaw with respect to the tunnel longitudinal axis; a geometric routine then selects the location that maximizes distance to the nearest obstacle. The paper states that this pair of outputs is sufficient for simple yet effective navigation in straight and curved tunnels, all without GNSS, prior maps, or external localization.
What carries the argument
The joint neural-geometric pipeline: a network that regresses yaw angle from tilted LiDAR returns, followed by the geometric computation of the maximum-clearance position inside the tunnel cross-section.
If this is right
- UAVs can hold a consistent heading and stay centered using only real-time LiDAR without building or consulting any map.
- The same sensor stream works for both linear and bending tunnel segments.
- Flight remains possible in complete darkness or on featureless walls where vision-based methods would lose track.
- High-speed runs become feasible because the pipeline avoids the computational cost of full localization or SLAM.
Where Pith is reading between the lines
- The approach could be tested in mine galleries whose cross-sections vary more than the training tunnels to check whether the yaw network generalizes.
- Adding a simple forward speed schedule based on the same clearance distance might let the vehicle slow automatically in tighter sections.
- The method's reliance on a fixed tilt angle of the LiDAR suggests that re-training or fine-tuning would be needed if the sensor mounting changes.
- Similar yaw-plus-clearance logic might apply to ground robots inside pipes or corridors where GNSS is also unavailable.
Load-bearing premise
The neural network must output an accurate yaw angle relative to the tunnel axis for any geometry, speed, or lighting condition the vehicle encounters.
What would settle it
A flight test through a curved tunnel section where the UAV's heading deviates enough to approach a wall despite the geometric position command would show the method is not sufficient.
Figures



read the original abstract
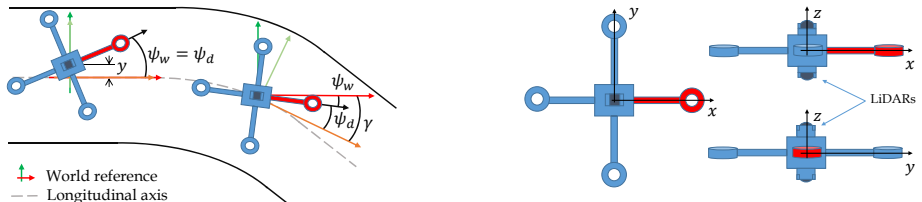
Navigation of UAVs in challenging environments like tunnels or mines, where it is not possible to use GNSS methods to self-localize, illumination may be uneven or nonexistent, and wall features are likely to be scarce, is a complex task, especially if the navigation has to be done at high speed. In this paper we propose a novel proof-of-concept navigation technique for UAVs based on the use of LiDAR information through the joint use of geometric and machine-learning algorithms. The perceived information is processed by a deep neural network to establish the yaw of the UAV with respect to the tunnel's longitudinal axis, in order to adjust the direction of navigation. Additionally, a geometric method is used to compute the safest location inside the tunnel (i.e. the one that maximizes the distance to the closest obstacle). This information proves to be sufficient for simple yet effective navigation in straight and curved tunnels.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a localization-free UAV navigation method for tunnels and mines that combines a deep neural network processing tilted-LiDAR returns to estimate yaw relative to the tunnel axis with a geometric computation of the position maximizing clearance to the nearest obstacle. The abstract asserts that these two outputs suffice for simple yet effective flight in both straight and curved tunnels at high speed.
Significance. If the central claim holds under quantitative scrutiny, the hybrid neural-geometric approach would provide a lightweight, GNSS-independent solution for high-speed flight in feature-scarce, poorly illuminated environments. The explicit separation of learned yaw estimation from an interpretable geometric safety step is a methodological strength that could be extended to other confined-space navigation tasks.
major comments (2)
- [Abstract] Abstract: the claim that 'this information proves to be sufficient for simple yet effective navigation in straight and curved tunnels' is unsupported by any quantitative results, yaw-error statistics, success rates, test environments, or failure-case analysis; without such evidence the sufficiency assertion cannot be evaluated.
- [Abstract] Abstract: no bound or sensitivity analysis is supplied on how yaw-estimation error scales with tunnel curvature radius or flight speed, yet the geometric max-distance step relies on the yaw estimate being accurate enough to keep the instantaneous safe-position command inside the tunnel walls.
minor comments (1)
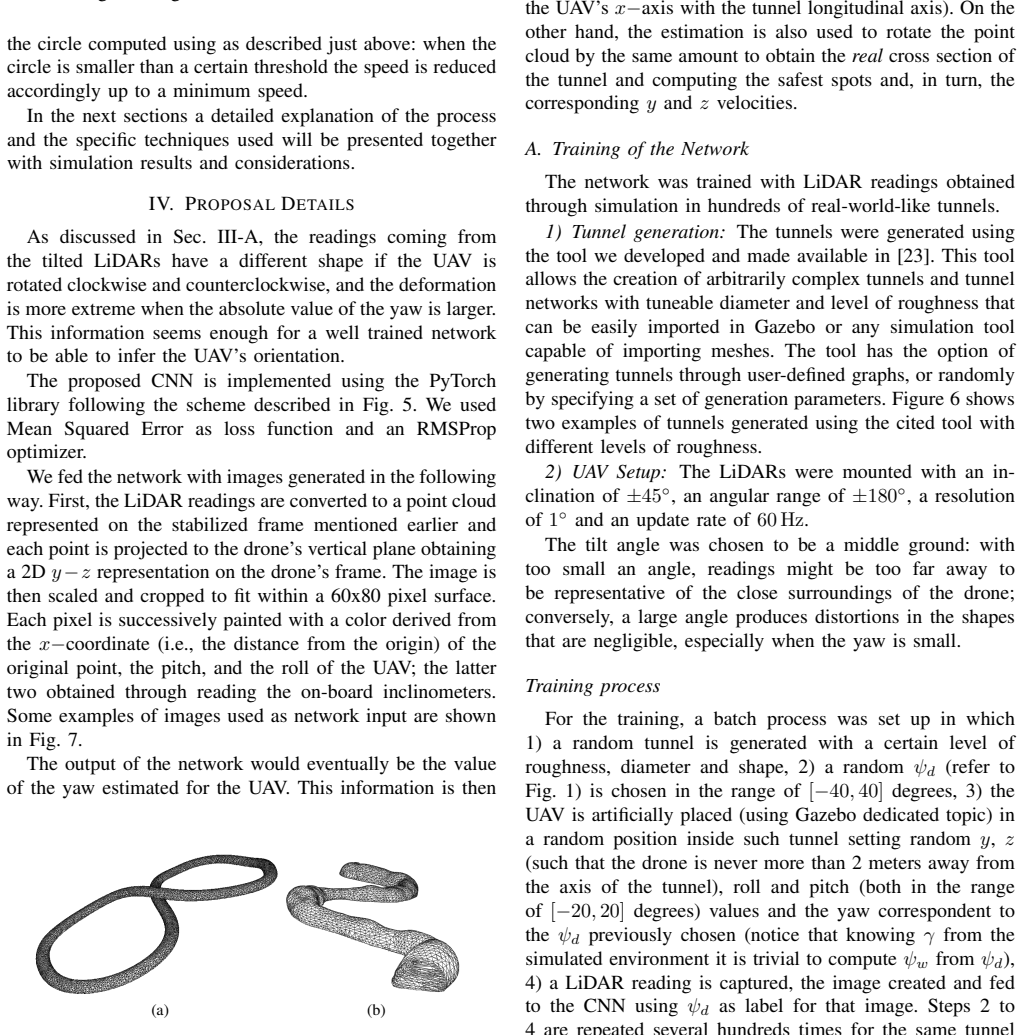
- The title mentions 'Tilted LiDARs' but the abstract provides no description of the tilt angle, mounting geometry, or its effect on the LiDAR point-cloud input to the network.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment point by point below, indicating planned revisions to strengthen the abstract.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim that 'this information proves to be sufficient for simple yet effective navigation in straight and curved tunnels' is unsupported by any quantitative results, yaw-error statistics, success rates, test environments, or failure-case analysis; without such evidence the sufficiency assertion cannot be evaluated.
Authors: The abstract is intentionally concise as a high-level summary. The full manuscript includes simulation results in the experiments section demonstrating navigation performance, with yaw-error statistics, success rates, and details on test environments for both straight and curved tunnels. To address the concern directly, we will revise the abstract to reference these supporting quantitative findings and qualify the sufficiency claim accordingly. revision: yes
-
Referee: [Abstract] Abstract: no bound or sensitivity analysis is supplied on how yaw-estimation error scales with tunnel curvature radius or flight speed, yet the geometric max-distance step relies on the yaw estimate being accurate enough to keep the instantaneous safe-position command inside the tunnel walls.
Authors: The manuscript does not supply analytical bounds. We will revise by adding a brief empirical sensitivity discussion, drawing on our existing simulation results to illustrate performance variation across different curvature radii and speeds, while noting the assumptions underlying the geometric step. revision: yes
Circularity Check
No circularity in derivation chain
full rationale
The paper describes an engineering combination of a neural network for yaw estimation from LiDAR and a geometric computation for maximum-distance safe position. No equations, fitted parameters renamed as predictions, self-citations, or uniqueness theorems are present in the provided text. The central claim is presented as a direct method without any derivation that reduces to its own inputs by construction. This matches the reader's assessment of score 1.0 with no self-referential structure.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Tilted LiDAR point clouds contain sufficient information for a neural network to estimate yaw relative to tunnel axis
Reference graph
Works this paper leans on
-
[1]
Ground robotics in tunnels: Keys and lessons learned after 10 years of research and experiments,
D. Tardioli, L. Riazuelo, D. Sicignano, C. Rizzo, F. Lera, J. L. Villarroel, and L. Montano, “Ground robotics in tunnels: Keys and lessons learned after 10 years of research and experiments,” Journal of Field Robotics , vol. 36, no. 6, pp. 1074–1101, 2019
work page 2019
-
[2]
Robot localization in tunnels: Combining discrete features in a pose graph framework,
T. Seco, M. T. L ´azaro, J. Espelos ´ın, L. Montano, and J. L. Villarroel, “Robot localization in tunnels: Combining discrete features in a pose graph framework,” Sensors, vol. 22, no. 4, p. 1390, 2022
work page 2022
-
[3]
Robot teams for intervention in confined and structured environments,
D. Tardioli, D. Sicignano, L. Riazuelo, A. Romeo, J. L. Villarroel, and L. Montano, “Robot teams for intervention in confined and structured environments,”J. of Field Robotics, vol. 33, no. 6, pp. 765–801, 2016
work page 2016
-
[4]
Challenges and implemented technologies used in autonomous drone racing,
H. Moon, J. Martinez-Carranza, T. Cieslewski, M. Faessler, D. Falanga, A. Simovic, D. Scaramuzza, S. Li, M. Ozo, C. De Wagter et al., “Challenges and implemented technologies used in autonomous drone racing,”Intelligent Service Robotics, vol. 12, no. 2, pp. 137–148, 2019
work page 2019
-
[5]
Au- tonomous drone racing with deep reinforcement learning,
Y . Song, M. Steinweg, E. Kaufmann, and D. Scaramuzza, “Au- tonomous drone racing with deep reinforcement learning,” in 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021, pp. 1205–1212
work page 2021
-
[6]
Alphapilot: Autonomous drone racing,
P. Foehn, D. Brescianini, E. Kaufmann, T. Cieslewski, M. Gehrig, M. Muglikar, and D. Scaramuzza, “Alphapilot: Autonomous drone racing,” Autonomous Robots, pp. 1–14, 2021
work page 2021
-
[7]
Flying free: A research overview of deep learning in drone navigation autonomy,
T. Lee, S. Mckeever, and J. Courtney, “Flying free: A research overview of deep learning in drone navigation autonomy,” Drones, vol. 5, no. 2, 2021. [Online]. Available: https://www.mdpi.com/ 2504-446X/5/2/52
work page 2021
-
[8]
Perception, guidance, and navigation for indoor autonomous drone racing using deep learn- ing,
S. Jung, S. Hwang, H. Shin, and D. H. Shim, “Perception, guidance, and navigation for indoor autonomous drone racing using deep learn- ing,” IEEE Robotics and Automation Letters , vol. 3, no. 3, pp. 2539– 2544, 2018
work page 2018
-
[9]
Towards high-speed localisation for autonomous drone racing,
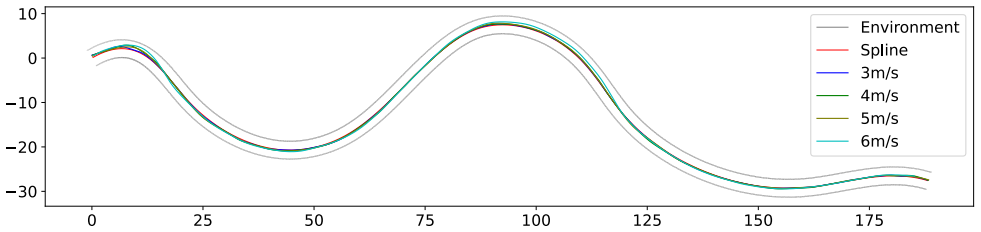
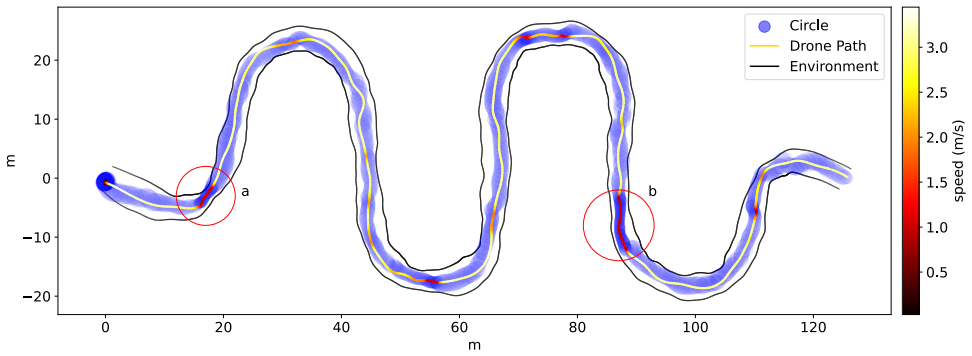
J. A. Cocoma-Ortega and J. Mart ´ınez-Carranza, “Towards high-speed localisation for autonomous drone racing,” in Mexican International Conference on Artificial Intelligence . Springer, 2019, pp. 740–751. 7 Fig. 14: Triple-S-shaped rough simulation environment. Circle C computed by the UA V at each point (blue), and its path and speed (color scale). The b...
work page 2019
-
[10]
A machine learning approach to visual perception of forest trails for mobile robots,
A. Giusti, J. Guzzi, D. C. Cires ¸an, F.-L. He, J. P. Rodr´ıguez, F. Fontana, M. Faessler, C. Forster, J. Schmidhuber, G. D. Caro, D. Scaramuzza, and L. M. Gambardella, “A machine learning approach to visual perception of forest trails for mobile robots,” IEEE Robotics and Automation Letters, vol. 1, no. 2, pp. 661–667, 2016
work page 2016
-
[11]
Learning high-speed flight in the wild,
A. Loquercio, E. Kaufmann, R. Ranftl, M. M ¨uller, V . Koltun, and D. Scaramuzza, “Learning high-speed flight in the wild,” Science Robotics, vol. 6, no. 59, p. eabg5810, 2021. [Online]. Available: https://www.science.org/doi/abs/10.1126/scirobotics.abg5810
-
[12]
A convolutional neural network feature detection approach to autonomous quadrotor indoor navigation,
A. Garcia, S. S. Mittal, E. Kiewra, and K. Ghose, “A convolutional neural network feature detection approach to autonomous quadrotor indoor navigation,” in 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , 2019, pp. 74–81
work page 2019
-
[13]
P. Petr ´aˇcek, V . Kr´atk´y, and M. Saska, “Dronument: System for reliable deployment of micro aerial vehicles in dark areas of large historical monuments,” IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2078–2085, 2020
work page 2078
-
[14]
Range image-based lidar localization for autonomous vehicles,
X. Chen, I. Vizzo, T. L ¨abe, J. Behley, and C. Stachniss, “Range image-based lidar localization for autonomous vehicles,” in2021 IEEE International Conference on Robotics and Automation (ICRA) , 2021, pp. 5802–5808
work page 2021
-
[15]
G. Tinchev, A. Penate-Sanchez, and M. Fallon, “Learning to see the wood for the trees: Deep laser localization in urban and natural environments on a CPU,” IEEE Robotics and Automation Letters , vol. 4, no. 2, pp. 1327–1334, 2019
work page 2019
-
[16]
Towards resilient autonomous navigation of drones,
A. Santamaria-Navarro, R. Thakker, D. D. Fan, B. Morrell, and A.-a. Agha-mohammadi, “Towards resilient autonomous navigation of drones,” in Robotics Research , T. Asfour, E. Yoshida, J. Park, H. Christensen, and O. Khatib, Eds. Cham: Springer International Publishing, 2022, pp. 922–937
work page 2022
-
[17]
R. Pugliese, T. Konrad, and D. Abel, “LiDAR-aided relative and absolute localization for automated UA V-based inspection of aircraft fuselages,” in 2021 IEEE Int. Conf. on Multisensor Fusion and Integration for Intelligent Systems (MFI) , 2021, pp. 1–6
work page 2021
-
[18]
A comprehensive review of applications of drone technology in the mining industry,
J. Shahmoradi, E. Talebi, P. Roghanchi, and M. Hassanalian, “A comprehensive review of applications of drone technology in the mining industry,” Drones, vol. 4, no. 3, 2020. [Online]. Available: https://www.mdpi.com/2504-446X/4/3/34
work page 2020
-
[19]
T. Elmokadem and A. V . Savkin, “A method for autonomous collision- free navigation of a quadrotor UA V in unknown tunnel-like environ- ments,” Robotica, p. 1–27, 2021
work page 2021
-
[20]
Towards MA V navigation in underground mine using deep learning,
S. S. Mansouri, C. Kanellakis, G. Georgoulas, and G. Nikolakopoulos, “Towards MA V navigation in underground mine using deep learning,” in 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2018, pp. 880–885
work page 2018
-
[21]
Vision-based mav navigation in underground mine using convolutional neural network,
S. S. Mansouri, P. Karvelis, C. Kanellakis, D. Kominiak, and G. Niko- lakopoulos, “Vision-based mav navigation in underground mine using convolutional neural network,” in IECON 2019-45th Annual Confer- ence of the IEEE Industrial Electronics Society , vol. 1. IEEE, 2019, pp. 750–755
work page 2019
-
[22]
Neither fast nor slow: How to fly through narrow tunnels,
L. Wang, H. Xu, Y . Zhang, and S. Shen, “Neither fast nor slow: How to fly through narrow tunnels,” arXiv preprint arXiv:2201.03312 , 2022
-
[23]
Procedural tun- nel generation,
L. Cano, D. Tardioli, and A. R. Mosteo, “Procedural tun- nel generation,” Available at: https://github.com/LorenzoCanoAn/ procedural-subt-gen, accessed: 2024-01-01
work page 2024
-
[24]
D. Garcia-Castellanos and U. Lombardo, “Poles of inaccessibility: A calculation algorithm for the remotest places on earth,” Scottish Geographical Journal, vol. 123, no. 3, pp. 227–233, 2007. [Online]. Available: https://doi.org/10.1080/14702540801897809
-
[25]
V . Agafonkin, “Mapbox/polylabel: A fast algorithm for finding the pole of inaccessibility of a polygon (in javascript and c++),” 2022. [Online]. Available: https://github.com/mapbox/polylabel
work page 2022
-
[26]
D. H. Douglas and T. K. Peucker, “Algorithms for the reduction of the number of points required to represent a digitized line or its caricature,” Cartographica: the international journal for geographic information and geovisualization , vol. 10, no. 2, pp. 112–122, 1973
work page 1973
-
[27]
A flexible and scalable SLAM system with full 3D motion estimation,
S. Kohlbrecher, J. Meyer, O. von Stryk, and U. Klingauf, “A flexible and scalable SLAM system with full 3D motion estimation,” in Proc. IEEE International Symposium on Safety, Security and Rescue Robotics (SSRR). IEEE, November 2011. 8
work page 2011
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.