Non-Uniform Exposure Imaging via Neuromorphic Shutter Control
Pith reviewed 2026-05-24 01:35 UTC · model grok-4.3
The pith
Neuromorphic events enable real-time adaptive non-uniform exposure to reduce motion blur and noise.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By using the extremely low latency of events to monitor real-time motion, the Neuromorphic Shutter Control system enables scene-adaptive exposure that avoids motion blur and reduces instant noise; an accompanying self-supervised event-based denoising network (SEID) then restores consistent SNR across the resulting non-uniform exposures, as demonstrated on a hardware prototype and collected real-world dataset.
What carries the argument
Neuromorphic Shutter Control (NSC) system, which reads event streams to detect intra-frame motion and set per-region exposure times.
If this is right
- Non-uniform exposure techniques move from offline processing to live camera control.
- Hybrid frame-plus-event cameras become a practical route to blur-noise trade-offs in dynamic environments.
- Self-supervised denoising can exploit inter-frame event motion to replace paired clean-noisy training data.
- Hardware prototypes already demonstrate synchronized capture, lowering the barrier to further real-world tests.
Where Pith is reading between the lines
- The same event-driven control loop could be tested on other sensor pairings, such as event plus depth cameras.
- If event noise statistics prove stable across lighting conditions, the SEID training scheme might generalize without scene-specific retraining.
- The collected dataset of synchronized frames and events could support follow-on work on event-guided deblurring or super-resolution.
Load-bearing premise
Event data can be trusted to give accurate enough real-time motion information to drive useful shutter adjustments.
What would settle it
A side-by-side test in which the NSC system produces visibly more blur or noise than a conventional high-speed camera baseline when both are run on the same fast-moving scene.
Figures










read the original abstract
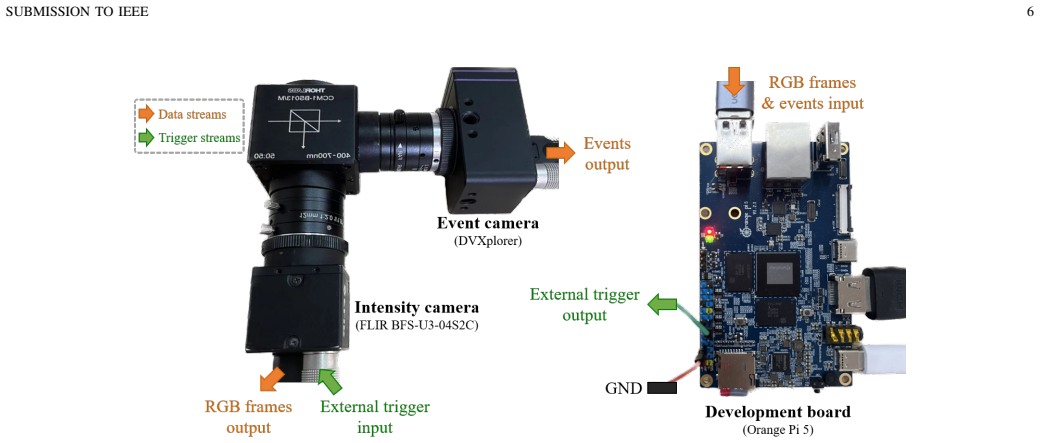
By leveraging the blur-noise trade-off, imaging with non-uniform exposures largely extends the image acquisition flexibility in harsh environments. However, the limitation of conventional cameras in perceiving intra-frame dynamic information prevents existing methods from being implemented in the real-world frame acquisition for real-time adaptive camera shutter control. To address this challenge, we propose a novel Neuromorphic Shutter Control (NSC) system to avoid motion blurs and alleviate instant noises, where the extremely low latency of events is leveraged to monitor the real-time motion and facilitate the scene-adaptive exposure. Furthermore, to stabilize the inconsistent Signal-to-Noise Ratio (SNR) caused by the non-uniform exposure times, we propose an event-based image denoising network within a self-supervised learning paradigm, i.e., SEID, exploring the statistics of image noises and inter-frame motion information of events to obtain artificial supervision signals for high-quality imaging in real-world scenes. To illustrate the effectiveness of the proposed NSC, we implement it in hardware by building a hybrid-camera imaging prototype system, with which we collect a real-world dataset containing well-synchronized frames and events in diverse scenarios with different target scenes and motion patterns. Experiments on the synthetic and real-world datasets demonstrate the superiority of our method over state-of-the-art approaches.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a Neuromorphic Shutter Control (NSC) system that leverages event-camera low latency for real-time scene-adaptive exposure control to avoid motion blur while mitigating noise in non-uniform exposure imaging. It further introduces a self-supervised event-based image denoising network (SEID) that exploits event motion statistics for supervision, implements the approach in a hybrid-camera hardware prototype, collects a synchronized real-world frame-event dataset across diverse motion scenarios, and reports experimental superiority over state-of-the-art methods on both synthetic and real data.
Significance. If the end-to-end latency claim is substantiated, the work would meaningfully advance practical adaptive imaging by demonstrating neuromorphic sensing for intra-frame control. The hardware prototype and accompanying real-world dataset constitute concrete strengths that move the contribution beyond simulation-only validation.
major comments (2)
- [Abstract / Hardware Prototype] Abstract and hardware prototype description: the central claim that 'the extremely low latency of events is leveraged to monitor the real-time motion and facilitate the scene-adaptive exposure' is load-bearing, yet no measured end-to-end latency (event generation through processing, decision, and physical shutter actuation) is reported. Without these numbers relative to frame time or motion timescales, the real-world dataset results cannot confirm that pipeline delay does not negate the claimed benefit.
- [Experiments] Experiments section: the abstract states superiority on synthetic and real-world datasets, but the provided description supplies no concrete metrics, baseline methods, or error analysis; this prevents verification that the NSC+SEID pipeline actually outperforms prior non-uniform exposure techniques under the claimed real-time constraints.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for recognizing the hardware prototype and real-world dataset as concrete strengths. We address the two major comments point by point below. Where revisions are needed, we will incorporate them in the next manuscript version.
read point-by-point responses
-
Referee: [Abstract / Hardware Prototype] Abstract and hardware prototype description: the central claim that 'the extremely low latency of events is leveraged to monitor the real-time motion and facilitate the scene-adaptive exposure' is load-bearing, yet no measured end-to-end latency (event generation through processing, decision, and physical shutter actuation) is reported. Without these numbers relative to frame time or motion timescales, the real-world dataset results cannot confirm that pipeline delay does not negate the claimed benefit.
Authors: We agree that explicit end-to-end latency measurements are necessary to fully substantiate the real-time claim. The revised manuscript will include a new subsection in the hardware prototype description that reports measured latencies for event generation, processing, decision, and physical shutter actuation, together with direct comparisons to frame times and motion timescales observed in the collected dataset. revision: yes
-
Referee: [Experiments] Experiments section: the abstract states superiority on synthetic and real-world datasets, but the provided description supplies no concrete metrics, baseline methods, or error analysis; this prevents verification that the NSC+SEID pipeline actually outperforms prior non-uniform exposure techniques under the claimed real-time constraints.
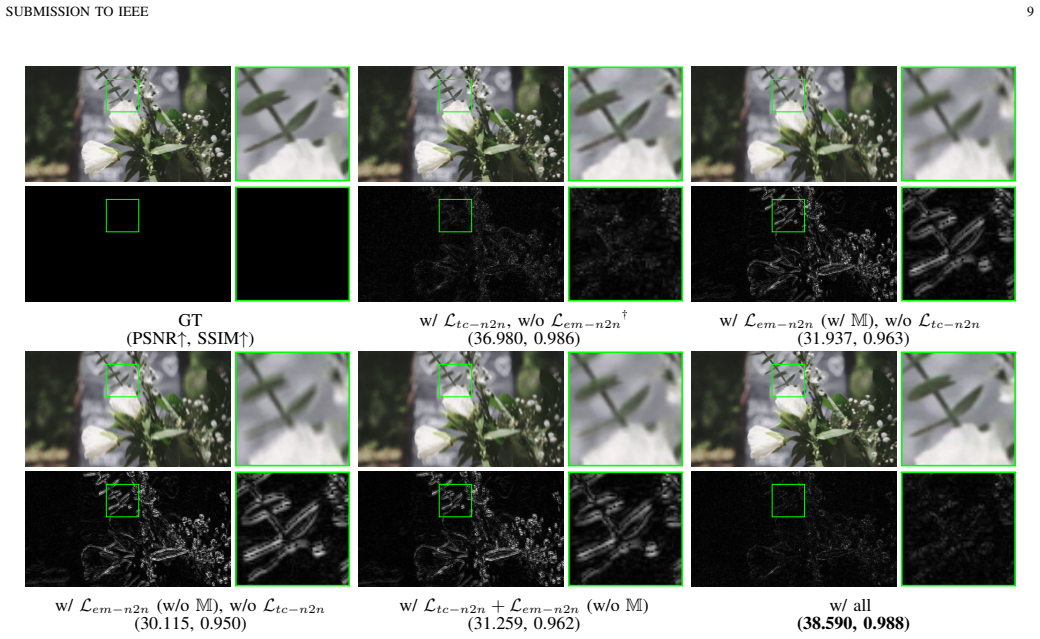
Authors: The full manuscript already presents quantitative results with concrete metrics (PSNR, SSIM), listed baseline methods, and error analysis on both synthetic and real data. To improve accessibility, the revision will add a concise summary table of key numerical results and explicitly restate the baseline methods in the abstract and experiments overview, while confirming that all evaluations respect the real-time constraints of the hardware pipeline. revision: partial
Circularity Check
No circularity in derivation chain
full rationale
The paper presents a hardware prototype for neuromorphic shutter control and a self-supervised denoising network (SEID) that uses external event data and real-world measurements. No mathematical derivations, equations, or parameter-fitting steps are described in the provided text that reduce predictions to inputs by construction. Claims rely on independent hardware implementation and dataset collection rather than self-referential definitions or self-citation chains. This is the standard case of a self-contained empirical contribution.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Learning to extract a video sequence from a single motion-blurred image,
M. Jin, G. Meishvili, and P. Favaro, “Learning to extract a video sequence from a single motion-blurred image,” in CVPR, 2018, pp. 6334–6342. 1
work page 2018
-
[2]
Rethinking coarse-to-fine approach in single image deblurring,
S.-J. Cho, S.-W. Ji, J.-P. Hong, S.-W. Jung, and S.-J. Ko, “Rethinking coarse-to-fine approach in single image deblurring,” in ICCV, 2021, pp. 4641–4650. 1
work page 2021
-
[3]
Exposure trajectory recovery from motion blur,
Y . Zhang, C. Wang, S. J. Maybank, and D. Tao, “Exposure trajectory recovery from motion blur,” IEEE TPAMI, vol. 44, no. 11, pp. 7490– 7504, 2021. 1, 8, 9
work page 2021
-
[4]
E-cir: Event-enhanced continuous intensity recovery,
C. Song, Q. Huang, and C. Bajaj, “E-cir: Event-enhanced continuous intensity recovery,” in CVPR, 2022, pp. 7803–7812. 1
work page 2022
-
[5]
Deblurring low-light images with events,
C. Zhou, M. Teng, J. Han, J. Liang, C. Xu, G. Cao, and B. Shi, “Deblurring low-light images with events,” IJCV, vol. 131, no. 5, pp. 1284–1298, 2023. 1
work page 2023
-
[6]
Burst denoising with kernel prediction networks,
B. Mildenhall, J. T. Barron, J. Chen, D. Sharlet, R. Ng, and R. Carroll, “Burst denoising with kernel prediction networks,” in CVPR, 2018, pp. 2502–2510. 1
work page 2018
-
[7]
Lsd 2–joint denoising and deblurring of short and long exposure images with cnns,
J. Mustaniemi, J. Kannala, J. Matas, S. S ¨arkk¨a, and J. Heikkil ¨a, “Lsd 2–joint denoising and deblurring of short and long exposure images with cnns,” arXiv preprint arXiv:1811.09485 , 2018. 1
-
[8]
Basis prediction networks for effective burst denoising with large kernels,
Z. Xia, F. Perazzi, M. Gharbi, K. Sunkavalli, and A. Chakrabarti, “Basis prediction networks for effective burst denoising with large kernels,” in CVPR, 2020, pp. 11 844–11 853. 1, 3
work page 2020
-
[9]
Image denoising in the deep learning era,
S. Izadi, D. Sutton, and G. Hamarneh, “Image denoising in the deep learning era,” Artificial Intelligence Review , vol. 56, no. 7, pp. 5929– 5974, 2023. 1, 3, 6
work page 2023
-
[10]
Digital gimbal: End-to- end deep image stabilization with learnable exposure times,
O. Dahary, M. Jacoby, and A. M. Bronstein, “Digital gimbal: End-to- end deep image stabilization with learnable exposure times,” in CVPR, 2021, pp. 11 936–11 945. 1, 2, 8, 9
work page 2021
-
[11]
Low-light image restoration with short-and long-exposure raw pairs,
M. Chang, H. Feng, Z. Xu, and Q. Li, “Low-light image restoration with short-and long-exposure raw pairs,” IEEE TMM, vol. 24, pp. 702–714,
-
[12]
D2hnet: Joint denoising and deblurring with hierarchical network for robust night image restoration,
Y . Zhao, Y . Xu, Q. Yan, D. Yang, X. Wang, and L.-M. Po, “D2hnet: Joint denoising and deblurring with hierarchical network for robust night image restoration,” in ECCV, 2022, pp. 91–110. 1
work page 2022
-
[13]
Z. Zhang, K. Dong, J. Suo, and Q. Dai, “Deep coded exposure: end- to-end co-optimization of flutter shutter and deblurring processing for general motion blur removal,” Photonics Research, vol. 11, no. 10, pp. 1678–1686, 2023. 1, 2, 8, 9 SUBMISSION TO IEEE 13
work page 2023
-
[14]
Camera attributes control for visual odometry with motion blur awareness,
B. Han, Y . Lin, Y . Dong, H. Wang, T. Zhang, and C. Liang, “Camera attributes control for visual odometry with motion blur awareness,” IEEE/ASME Transactions on Mechatronics , 2023. 1
work page 2023
-
[15]
A 128 ×128 120 dB 15 µs latency asynchronous temporal contrast vision sensor,
P. Lichtsteiner, C. Posch, and T. Delbruck, “A 128 ×128 120 dB 15 µs latency asynchronous temporal contrast vision sensor,” IEEE J. Solid- State Circuits, vol. 43, no. 2, pp. 566–576, 2008. 1, 3
work page 2008
-
[16]
Event- based vision: A survey,
G. Gallego, T. Delbr ¨uck, G. Orchard, C. Bartolozzi, B. Taba, A. Censi, S. Leutenegger, A. J. Davison, J. Conradt, K. Daniilidis et al., “Event- based vision: A survey,”IEEE TPAMI, vol. 44, no. 1, pp. 154–180, 2020. 1, 3
work page 2020
-
[17]
Exploring and evaluating image restoration potential in dynamic scenes,
C. Zhang, S. Su, Y . Zhu, Q. Yan, J. Sun, and Y . Zhang, “Exploring and evaluating image restoration potential in dynamic scenes,” in CVPR, 2022, pp. 2067–2076. 1, 2, 8
work page 2022
-
[18]
The tradeoff between snr and exposure-set size in hdr imaging,
N. Barakat, T. E. Darcie, and A. N. Hone, “The tradeoff between snr and exposure-set size in hdr imaging,” in ICIP, 2008, pp. 1848–1851. 1
work page 2008
-
[19]
Fastdvdnet: Towards real-time deep video denoising without flow estimation,
M. Tassano, J. Delon, and T. Veit, “Fastdvdnet: Towards real-time deep video denoising without flow estimation,” in CVPR, 2020, pp. 1354–
work page 2020
-
[20]
Patch craft: Video denoising by deep modeling and patch matching,
G. Vaksman, M. Elad, and P. Milanfar, “Patch craft: Video denoising by deep modeling and patch matching,” in ICCV, 2021, pp. 2157–2166. 1, 8, 9
work page 2021
-
[21]
Multi-stage progressive image restoration,
S. W. Zamir, A. Arora, S. Khan, M. Hayat, F. S. Khan, M.-H. Yang, and L. Shao, “Multi-stage progressive image restoration,” in CVPR, 2021, pp. 14 821–14 831. 1
work page 2021
-
[22]
Patch-craft self-supervised training for correlated image denoising,
G. Vaksman and M. Elad, “Patch-craft self-supervised training for correlated image denoising,” in CVPR, 2023, pp. 5795–5804. 1, 2, 6, 8, 9, 10, 11
work page 2023
-
[23]
Time lens: Event-based video frame interpolation,
S. Tulyakov, D. Gehrig, S. Georgoulis, J. Erbach, M. Gehrig, Y . Li, and D. Scaramuzza, “Time lens: Event-based video frame interpolation,” in CVPR, 2021, pp. 16 155–16 164. 2, 3, 6
work page 2021
-
[24]
Noise2noise: Learning image restoration without clean data,
J. Lehtinen, J. Munkberg, J. Hasselgren, S. Laine, T. Karras, M. Aittala, and T. Aila, “Noise2noise: Learning image restoration without clean data,” in ICML, 2018, pp. 2965–2974. 2, 6
work page 2018
-
[25]
Noise2void-learning denoising from single noisy images,
A. Krull, T.-O. Buchholz, and F. Jug, “Noise2void-learning denoising from single noisy images,” in CVPR, 2019, pp. 2129–2137. 2, 6
work page 2019
-
[26]
High-quality self- supervised deep image denoising,
S. Laine, T. Karras, J. Lehtinen, and T. Aila, “High-quality self- supervised deep image denoising,” NeurIPS, vol. 32, 2019. 2, 6
work page 2019
-
[27]
Neighbor2neighbor: Self- supervised denoising from single noisy images,
T. Huang, S. Li, X. Jia, H. Lu, and J. Liu, “Neighbor2neighbor: Self- supervised denoising from single noisy images,” in CVPR, 2021, pp. 14 781–14 790. 2, 6
work page 2021
-
[28]
Ap-bsn: Self-supervised denoising for real-world images via asymmetric pd and blind-spot network,
W. Lee, S. Son, and K. M. Lee, “Ap-bsn: Self-supervised denoising for real-world images via asymmetric pd and blind-spot network,” in CVPR, 2022, pp. 17 725–17 734. 2, 6
work page 2022
-
[29]
Spatially adaptive self-supervised learning for real-world image denoising,
J. Li, Z. Zhang, X. Liu, C. Feng, X. Wang, L. Lei, and W. Zuo, “Spatially adaptive self-supervised learning for real-world image denoising,” in CVPR, 2023, pp. 9914–9924. 2, 6
work page 2023
-
[30]
Bringing a blurry frame alive at high frame-rate with an event camera,
L. Pan, C. Scheerlinck, X. Yu, R. Hartley, M. Liu, and Y . Dai, “Bringing a blurry frame alive at high frame-rate with an event camera,” in CVPR, 2019, pp. 6820–6829. 3
work page 2019
-
[31]
Event enhanced high- quality image recovery,
B. Wang, J. He, L. Yu, G.-S. Xia, and W. Yang, “Event enhanced high- quality image recovery,” in ECCV, 2020, pp. 155–171. 3
work page 2020
-
[32]
Motion deblurring with real events,
F. Xu, L. Yu, B. Wang, W. Yang, G.-S. Xia, X. Jia, Z. Qiao, and J. Liu, “Motion deblurring with real events,” in ICCV, 2021, pp. 2583–2592. 3
work page 2021
-
[33]
Event-based fusion for motion deblurring with cross- modal attention,
L. Sun, C. Sakaridis, J. Liang, Q. Jiang, K. Yang, P. Sun, Y . Ye, K. Wang, and L. V . Gool, “Event-based fusion for motion deblurring with cross- modal attention,” in ECCV, 2022, pp. 412–428. 3, 8, 9
work page 2022
-
[34]
Generalizing event- based motion deblurring in real-world scenarios,
X. Zhang, L. Yu, W. Yang, J. Liu, and G.-S. Xia, “Generalizing event- based motion deblurring in real-world scenarios,” in CVPR, 2023, pp. 10 734–10 744. 3
work page 2023
-
[35]
Learning event-driven video deblurring and interpolation,
S. Lin, J. Zhang, J. Pan, Z. Jiang, D. Zou, Y . Wang, J. Chen, and J. Ren, “Learning event-driven video deblurring and interpolation,” in ECCV, 2020, pp. 695–710. 3
work page 2020
-
[36]
Time lens++: Event-based frame interpolation with parametric non-linear flow and multi-scale fusion,
S. Tulyakov, A. Bochicchio, D. Gehrig, S. Georgoulis, Y . Li, and D. Scaramuzza, “Time lens++: Event-based frame interpolation with parametric non-linear flow and multi-scale fusion,” in CVPR, 2022, pp. 17 755–17 764. 3
work page 2022
-
[37]
Unifying motion deblurring and frame interpola- tion with events,
X. Zhang and L. Yu, “Unifying motion deblurring and frame interpola- tion with events,” in CVPR, 2022, pp. 17 765–17 774. 3, 5
work page 2022
-
[38]
S. Battiato, A. R. Bruna, G. Messina, and G. Puglisi, Image processing for embedded devices . Bentham Science Publishers, 2010. 3
work page 2010
-
[39]
Radiometric ccd camera calibration and noise estimation,
G. E. Healey and R. Kondepudy, “Radiometric ccd camera calibration and noise estimation,” IEEE TPAMI, vol. 16, no. 3, pp. 267–276, 1994. 3
work page 1994
-
[40]
B. K. Horn and B. G. Schunck, “Determining optical flow,” Artificial Intelligence, vol. 17, no. 1, pp. 185–203, 1981. 3
work page 1981
-
[41]
E-raft: Dense optical flow from event cameras,
M. Gehrig, M. Millh ¨ausler, D. Gehrig, and D. Scaramuzza, “E-raft: Dense optical flow from event cameras,” in 3DV, 2021, pp. 197–206. 4
work page 2021
-
[42]
Real-time optical flow for vehicular perception with low-and high-resolution event cameras,
V . Brebion, J. Moreau, and F. Davoine, “Real-time optical flow for vehicular perception with low-and high-resolution event cameras,” IEEE TITS, vol. 23, no. 9, pp. 15 066–15 078, 2021. 4
work page 2021
-
[43]
Secrets of event-based optical flow,
S. Shiba, Y . Aoki, and G. Gallego, “Secrets of event-based optical flow,” in ECCV, 2022, pp. 628–645. 4
work page 2022
-
[44]
Z. Zhang, A. Yezzi, and G. Gallego, “Formulating event-based image reconstruction as a linear inverse problem with deep regularization using optical flow,” IEEE TPAMI, vol. 45, no. 7, pp. 8372–8389, 2022. 4
work page 2022
-
[45]
Deformable convnets v2: More deformable, better results,
X. Zhu, H. Hu, S. Lin, and J. Dai, “Deformable convnets v2: More deformable, better results,” in CVPR, 2019, pp. 9308–9316. 6
work page 2019
-
[46]
Distinctive image features from scale-invariant keypoints,
D. G. Lowe, “Distinctive image features from scale-invariant keypoints,” IJCV, vol. 60, pp. 91–110, 2004. 7
work page 2004
-
[47]
Events-to-video: Bringing modern computer vision to event cameras,
H. Rebecq, R. Ranftl, V . Koltun, and D. Scaramuzza, “Events-to-video: Bringing modern computer vision to event cameras,” in CVPR, 2019, pp. 3857–3866. 7
work page 2019
-
[48]
Automated camera-exposure control for robust localization in varying illumination environments,
Y . Wang, H. Chen, S. Zhang, and W. Lu, “Automated camera-exposure control for robust localization in varying illumination environments,” Autonomous Robots, vol. 46, no. 4, pp. 515–534, 2022. 7
work page 2022
-
[49]
Recovering high dynamic range radiance maps from photographs,
P. E. Debevec and J. Malik, “Recovering high dynamic range radiance maps from photographs,” in ACM SIGGRAPH 2008 classes , 2008, pp. 1–10. 7
work page 2008
-
[50]
Video enhance- ment with task-oriented flow,
T. Xue, B. Chen, J. Wu, D. Wei, and W. T. Freeman, “Video enhance- ment with task-oriented flow,” IJCV, vol. 127, pp. 1106–1125, 2019. 8, 10
work page 2019
-
[51]
Real-time intermediate flow estimation for video frame interpolation,
Z. Huang, T. Zhang, W. Heng, B. Shi, and S. Zhou, “Real-time intermediate flow estimation for video frame interpolation,” in ECCV, 2022, pp. 624–642. 8
work page 2022
-
[52]
Dvs-voltmeter: Stochastic process- based event simulator for dynamic vision sensors,
S. Lin, Y . Ma, Z. Guo, and B. Wen, “Dvs-voltmeter: Stochastic process- based event simulator for dynamic vision sensors,” in ECCV, 2022, pp. 578–593. 8
work page 2022
-
[53]
Learning temporal consistency for low light video enhancement from single images,
F. Zhang, Y . Li, S. You, and Y . Fu, “Learning temporal consistency for low light video enhancement from single images,” in CVPR, 2021, pp. 4967–4976. 8
work page 2021
-
[54]
Image quality assessment: from error visibility to structural similarity,
Z. Wang, A. C. Bovik, H. R. Sheikh, and E. P. Simoncelli, “Image quality assessment: from error visibility to structural similarity,” IEEE TIP, vol. 13, no. 4, pp. 600–612, 2004. 9
work page 2004
-
[55]
An iterative image registration technique with an application to stereo vision,
B. D. Lucas and T. Kanade, “An iterative image registration technique with an application to stereo vision,” inIJCAI, vol. 2, 1981, pp. 674–679. 11
work page 1981
-
[56]
Detection and tracking of point,
C. Tomasi and T. Kanade, “Detection and tracking of point,” IJCV, vol. 9, no. 137-154, p. 2, 1991. 11
work page 1991
-
[57]
Understanding the performance of neuromorphic event- based vision sensors,
A. iniVation, “Understanding the performance of neuromorphic event- based vision sensors,” Tech. Rep., 2020. 12
work page 2020
-
[58]
A linear comb filter for event flicker removal,
Z. Wang, D. Yuan, Y . Ng, and R. Mahony, “A linear comb filter for event flicker removal,” in ICRA, 2022, pp. 398–404. 12
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.