Interactive Safety Verification of Distributed Protocols by Inductive Proof Decomposition
Pith reviewed 2026-05-24 01:50 UTC · model grok-4.3
The pith
Inductive proof decomposition lets humans build safety invariants for distributed protocols by constructing proof graphs backwards from the target property.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
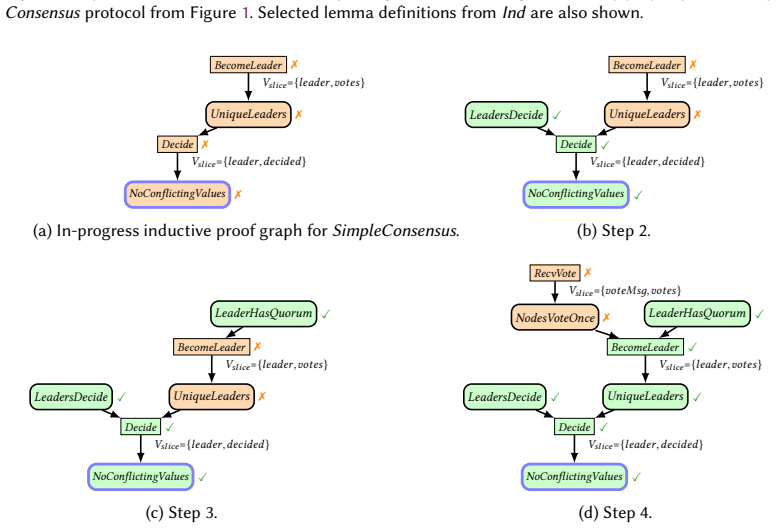
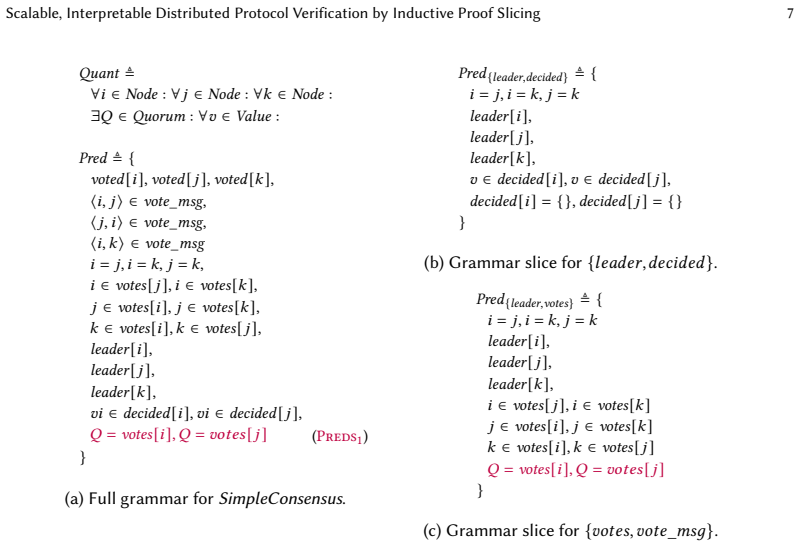
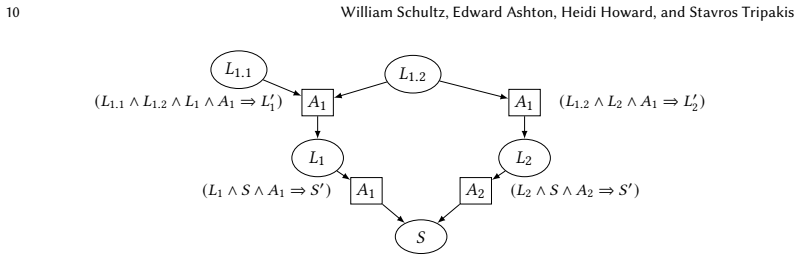
Inductive proof decomposition organizes the development of an inductive invariant as an inductive proof graph built backwards from a target safety property; nodes of the graph are refined using induction counterexamples localized to those nodes and further decomposed according to the logical actions of the protocol's transition relation, with variable slicing applied locally at each node to reduce the visible state.
What carries the argument
The inductive proof graph, which structures inductive invariant development by localizing counterexamples to nodes and supporting decomposition based on protocol actions.
If this is right
- Safety proofs become feasible for protocols such as Raft that exceed the reach of automated tools.
- The resulting proof graphs expose the internal structure of a protocol's correctness argument.
- Variable slicing at each node reduces the state a verifier must consider at any one step.
- Localized counterexamples guide incremental refinement rather than requiring a single monolithic invariant.
Where Pith is reading between the lines
- The same graph-based decomposition could be tested on verification tasks outside distributed systems, such as concurrent software with large state spaces.
- Proof graphs might function as human-readable records of why a protocol satisfies its safety property.
- Parts of node decomposition or slicing might be automated and combined with existing model checkers.
Load-bearing premise
Induction counterexamples can be localized to specific nodes of the proof graph and those nodes can be decomposed based on the protocol's transition actions in a manner that permits successful completion for complex protocols.
What would settle it
An attempt to construct a complete inductive proof graph for the Raft protocol that fails to resolve all induction counterexamples even after repeated localization, decomposition, and variable slicing.
Figures






read the original abstract
Many techniques for the automated verification of distributed protocols have been developed over the past several years, but their performance is still unpredictable and their failure modes can be opaque for industrial scale verification tasks. Thus, in practice, large-scale verification efforts typically require some amount of human guidance. In this paper, we present inductive proof decomposition, a new methodology for interactive safety verification that provides a compositional, interactive approach to inductive invariant development. Our approach guides the human-aided development of inductive invariants via a novel structure, an inductive proof graph, which is built incrementally by a human verifier, working backwards from a target safety property. A user is guided by induction counterexamples that are localized to specific nodes of this graph, and nodes of this proof graph are further decomposed based on logical actions that appear in a protocol's transition relation. Our decomposition also enables a localized variable slicing technique that hides irrelevant protocol state at each sub-component of an inductive proof, allowing a user to focus on fine-grained sub-problems rather than a large, monolithic inductive invariant. We present our technique and experience applying it to develop inductive safety proofs of several complex distributed protocols, including the Raft consensus protocol, which is beyond the capabilities of modern automated verification tools. We also demonstrate how the developed proof graphs provide additional insight into the structure of a protocol proof and its correctness.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces inductive proof decomposition as an interactive methodology for safety verification of distributed protocols. It constructs an inductive proof graph backwards from a target safety property, localizes induction counterexamples to specific graph nodes, decomposes nodes according to logical actions in the protocol transition relation, and applies localized variable slicing to hide irrelevant state. The approach is presented as guiding human-aided invariant development and is demonstrated via experience reports on several protocols, including Raft, which the authors state is beyond the capabilities of modern automated verification tools. The developed proof graphs are also claimed to provide insight into protocol structure.
Significance. If the central claims hold, the work offers a structured, compositional framework that could meaningfully assist human verifiers in tackling complex distributed protocols where fully automated tools fail. The inductive proof graph and slicing technique address the practical difficulty of monolithic invariants, and the reported application to Raft constitutes a non-trivial case study. The methodology is scoped to interactive use rather than full automation, which aligns with the acknowledged need for human guidance in large-scale verification.
major comments (2)
- [§5] §5 (Raft case study): the claim that the method succeeds on Raft where automated tools fail lacks specific details on graph construction, node decompositions performed, counterexample localizations, or slicing applications; this evidence is load-bearing for assessing whether the localization and decomposition assumptions enable verification as stated.
- [§3.2] §3.2 (decomposition rules): the argument that induction counterexamples can be localized to nodes and that nodes can be decomposed by logical actions without compromising overall soundness requires an explicit invariant or lemma showing preservation of the inductive property across the graph; without it the central methodology's correctness is not fully established.
minor comments (2)
- The abstract would be strengthened by including one concrete example of a decomposed sub-problem or the scale of the Raft proof graph.
- [§3] Notation for the inductive proof graph (nodes, edges, and slicing) should be introduced with a small running example before the general definitions.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive review. We address the two major comments below and will incorporate revisions to strengthen the presentation of both the Raft case study and the soundness argument.
read point-by-point responses
-
Referee: [§5] §5 (Raft case study): the claim that the method succeeds on Raft where automated tools fail lacks specific details on graph construction, node decompositions performed, counterexample localizations, or slicing applications; this evidence is load-bearing for assessing whether the localization and decomposition assumptions enable verification as stated.
Authors: We agree that §5 would benefit from additional concrete details to make the Raft experience report more self-contained. The current text describes the overall structure of the proof graph and notes that automated tools could not complete the verification, but does not enumerate every decomposition step or slicing application. In the revised manuscript we will add a table or expanded narrative listing the principal nodes, the logical actions used for each decomposition, representative localized counterexamples, and the variables sliced at each node. This will allow readers to evaluate how the methodology scales to Raft without requiring them to reconstruct the full graph from the high-level description. revision: partial
-
Referee: [§3.2] §3.2 (decomposition rules): the argument that induction counterexamples can be localized to nodes and that nodes can be decomposed by logical actions without compromising overall soundness requires an explicit invariant or lemma showing preservation of the inductive property across the graph; without it the central methodology's correctness is not fully established.
Authors: The manuscript argues soundness by construction: the proof graph is built so that the conjunction of the per-node invariants implies the target safety property, and each decomposition step partitions the transition relation according to the protocol's logical actions while preserving the inductive step. However, we acknowledge that an explicit lemma stating the preservation property across the entire graph would make the argument easier to verify. We will add such a lemma (with a short proof sketch) to §3.2 in the revised version. revision: yes
Circularity Check
No significant circularity; new methodology is self-contained
full rationale
The paper presents a novel interactive methodology (inductive proof decomposition via proof graphs, counterexample localization, action-based node decomposition, and localized variable slicing) for human-guided invariant development. No equations, predictions, fitted parameters, or first-principles derivations appear in the provided text or abstract. Claims rest on the description of the technique and its reported application to protocols including Raft, without reduction to self-citations, self-definitions, or renamed known results. The approach is scoped as a human-aided process independent of prior fitted results, making the derivation chain self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Forward citations
Cited by 1 Pith paper
-
Simplifying Safety Proofs with Forward-Backward Reasoning and Prophecy
An incremental safety proof system using forward-backward reasoning and prophecy steps allows proving safety with simpler invariants than a single complex inductive invariant.
Reference graph
Works this paper leans on
-
[1]
A/l.sc/u.sc/r.sc, R., H/e.sc/n.sc/z.sc/i.sc/n.sc/g.sc/e.sc/r.sc, T. A., M/a.sc/n.sc/g.sc, F. Y. C., Q/a.sc/d.sc/e.sc/e.sc/r.sc, S., R/a.sc/j.sc/a.sc/m.sc/a.sc/n.sc/i.sc, S. K., /a.sc/n.sc/d.sc T/a.sc/s.sc/i.sc/r.sc/a.sc/n.sc, S.Mocha: Modularity in model checking. In Computer Aided Verification (Berlin, Heidelberg, 1998), A. J. Hu and M. Y. Vardi, Eds., Sp...
work page 1998
-
[2]
In 2017 Formal Methods in Computer Aided Design (FMCAD) (2017), IEEE, pp
B/e.sc/r.sc/r.sc/y.sc/h.sc/i.sc/l.sc/l.sc, R., I/v.sc/r.sc/i.sc/i.sc, A., V/e.sc/i.sc/r.sc/a.sc, N., /a.sc/n.sc/d.sc V/e.sc/n.sc/e.sc/r.sc/i.sc/s.sc, A.Learning support sets in IC3 and Quip: The good, the bad, and the ugly. In 2017 Formal Methods in Computer Aided Design (FMCAD) (2017), IEEE, pp. 140–147
work page 2017
-
[3]
M., S/t.sc/r.sc/i.sc/c.sc/h.sc/m.sc/a.sc/n.sc, O., /a.sc/n.sc/d.sc Z/h.sc/u.sc, Y
B/i.sc/e.sc/r.sc/e.sc, A., C/i.sc/m.sc/a.sc/t.sc/t.sc/i.sc, A., C/l.sc/a.sc/r.sc/k.sc/e.sc, E. M., S/t.sc/r.sc/i.sc/c.sc/h.sc/m.sc/a.sc/n.sc, O., /a.sc/n.sc/d.sc Z/h.sc/u.sc, Y. Bounded model checking. Adv. Comput. 58 (2003), 117–148
work page 2003
-
[4]
B/r.sc/a.sc/i.sc/t.sc/h.sc/w.sc/a.sc/i.sc/t.sc/e.sc, S., B/u.sc/c.sc/h.sc/m.sc/a.sc/n.sc, E., K/o.sc/n.sc/n.sc/o.sc/v.sc, I., M/i.sc/l.sc/o.sc/s.sc/e.sc/v.sc/i.sc/c.sc, Z., S/t.sc/o.sc/i.sc/l.sc/k.sc/o.sc/v.sc/s.sc/k.sc/a.sc, I., W/i.sc/d.sc/d.sc/e.sc/r.sc, J., /a.sc/n.sc/d.sc Z/a.sc/m.sc/f.sc/i.sc/r.sc, A.Formal Specification and Model Checking of the Ten...
work page 2020
-
[5]
C/o.sc/b.sc/l.sc/e.sc/i.sc/g.sc/h.sc, J. M., G/i.sc/a.sc/n.sc/n.sc/a.sc/k.sc/o.sc/p.sc/o.sc/u.sc/l.sc/o.sc/u.sc, D., /a.sc/n.sc/d.sc P/abreve.sc/s.sc/abreve.sc/r.sc/e.sc/a.sc/n.sc/u.sc, C. S.Learning assumptions for compositional verification. In Tools and Algorithms for the Construction and Analysis of Sy stems: 9th International Conference, TACAS 2003 He...
work page 2003
-
[6]
C/o.sc/r.sc/b.sc/e.sc/t.sc/t.sc, J. C., D/e.sc/a.sc/n.sc, J., E/p.sc/s.sc/t.sc/e.sc/i.sc/n.sc, M., F/i.sc/k.sc/e.sc/s.sc, A., F/r.sc/o.sc/s.sc/t.sc, C., F/u.sc/r.sc/m.sc/a.sc/n.sc, J., G/h.sc/e.sc/m.sc/a.sc/w.sc/a.sc/t.sc, S., G/u.sc/b.sc/a.sc/r.sc/e.sc/v.sc, A., H/e.sc/i.sc/s.sc/e.sc/r.sc, C., H/o.sc/c.sc/h.sc/s.sc/c.sc/h.sc/i.sc/l.sc/d.sc, P., H/s.sc/i....
work page 2012
-
[7]
C/o.sc/u.sc/s.sc/i.sc/n.sc/e.sc/a.sc/u.sc, D., D/o.sc/l.sc/i.sc/g.sc/e.sc/z.sc, D., L/a.sc/m.sc/p.sc/o.sc/r.sc/t.sc, L., M/e.sc/r.sc/z.sc, S., R/i.sc/c.sc/k.sc/e.sc/t.sc/t.sc/s.sc, D., /a.sc/n.sc/d.sc V /a.sc/n.sc/z.sc/e.sc/t.sc/t.sc/o.sc, H.TLA+ Proofs. Proceedings of the 18th International Symposium on Formal Methods (FM 2012 ), Dimitra Giannakopoulou a...
work page 2012
-
[8]
D., P/e.sc/r.sc/k.sc/i.sc/n.sc/s.sc, J
E/r.sc/n.sc/s.sc/t.sc, M. D., P/e.sc/r.sc/k.sc/i.sc/n.sc/s.sc, J. H., G/u.sc/o.sc, P. J., M/c.scC/a.sc/m.sc/a.sc/n.sc/t.sc, S., P/a.sc/c.sc/h.sc/e.sc/c.sc/o.sc, C., T/s.sc/c.sc/h.sc/a.sc/n.sc/t.sc/z.sc, M. S., /a.sc/n.sc/d.sc X/i.sc/a.sc/o.sc, C.The Daikon system for dynamic detection of likely invariants. Science of computer programming 69 , 1-3 (2007), 35–45
work page 2007
-
[9]
F/a.sc/r.sc/z.sc/a.sc/n.sc, A., K/i.sc/n.sc/c.sc/a.sc/i.sc/d.sc, Z., /a.sc/n.sc/d.sc P/o.sc/d.sc/e.sc/l.sc/s.sc/k.sc/i.sc, A.Inductive Data Flow Graphs. In The 40th Annual ACM SIGPLAN-SIGACT Symposium on Principles of Programming Languages, POPL ’13, Rome, Italy - January 23 - 25, 2013 (2013), R. Giacobazzi and R. Cousot, Eds., ACM, pp. 129–142
work page 2013
-
[10]
In Tools and Algorithms for the Construction and Analysis of Systems (Cham, 2018), D
F/e.sc/d.sc/y.sc/u.sc/k.sc/o.sc/v.sc/i.sc/c.sc/h.sc, G., /a.sc/n.sc/d.sc B/o.sc/d.sc/iacute.sc/k.sc, R.Accelerating Syntax-Guided Invariant Synthesis. In Tools and Algorithms for the Construction and Analysis of Systems (Cham, 2018), D. Beyer and M. Huisman, Eds., Springer International Pu blishing, pp. 251–269
work page 2018
-
[11]
F/l.sc/a.sc/n.sc/a.sc/g.sc/a.sc/n.sc, C., /a.sc/n.sc/d.sc L/e.sc/i.sc/n.sc/o.sc, K. R. M.Houdini, an Annotation Assistant for ESC/Java. In Proceedings of the International Symposium of Formal Methods Europe on Formal Methods for Increasing Software Productivity (Berlin, Heidelberg, 2001), FME ’01, Springer-Verlag, p. 500–517
work page 2001
-
[12]
G/o.sc/e.sc/l.sc, A., /a.sc/n.sc/d.sc S/a.sc/k.sc/a.sc/l.sc/l.sc/a.sc/h.sc, K.On Symmetry and Quantification: A New Approach to Verify Distributed P rotocols. In NASA Formal Methods: 13th International Symposium, NFM 202 1, Virtual Event, May 24–28, 2021, Proceedings (Berlin, Heidelberg, 2021), Springer-Verlag, p. 131–150
work page 2021
-
[13]
A.Towards an Automatic Proof of Lamport’s Paxos
G/o.sc/e.sc/l.sc, A., /a.sc/n.sc/d.sc S/a.sc/k.sc/a.sc/l.sc/l.sc/a.sc/h.sc, K. A.Towards an Automatic Proof of Lamport’s Paxos. 2021 Formal Methods in Computer Aided Design (FMCAD) (2021), 112–122
work page 2021
-
[14]
G/o.sc/r.sc/d.sc/o.sc/n.sc, M. J., K/a.sc/u.sc/f.sc/m.sc/a.sc/n.sc/n.sc, M., /a.sc/n.sc/d.sc R/a.sc/y.sc, S.The Right Tools for the Job: Correctness of Cone of Influence Reduct ion Proved Using ACL2 and HOL4. J. Autom. Reason. 47 , 1 (jun 2011), 1–16
work page 2011
-
[15]
In Operating Systems, An Advanced Course (Berlin, Heidelberg, 1978), Springer-Verlag, p
G/r.sc/a.sc/y.sc, J.Notes on data base operating systems. In Operating Systems, An Advanced Course (Berlin, Heidelberg, 1978), Springer-Verlag, p. 393–481
work page 1978
-
[16]
2015 Formal Methods in Computer-Aided Design (FMCAD) (2015), 65–72
G/u.sc/r.sc/f.sc/i.sc/n.sc/k.sc/e.sc/l.sc, A., /a.sc/n.sc/d.sc I/v.sc/r.sc/i.sc/i.sc, A.Pushing to the top. 2015 Formal Methods in Computer-Aided Design (FMCAD) (2015), 65–72
work page 2015
-
[17]
In 18th USENIX Symposium on Networked Systems Design and Imple mentation (NSDI 21) (Apr
H/a.sc/n.sc/c.sc/e.sc, T., H/e.sc/u.sc/l.sc/e.sc, M., M/a.sc/r.sc/t.sc/i.sc/n.sc/s.sc, R., /a.sc/n.sc/d.sc P/a.sc/r.sc/n.sc/o.sc, B.Finding Invariants of Distributed Systems: It’s a Small (Enough) World After All. In 18th USENIX Symposium on Networked Systems Design and Imple mentation (NSDI 21) (Apr. 2021), USENIX Association, pp. 115–131
work page 2021
-
[18]
H/o.sc/l.sc/z.sc/m.sc/a.sc/n.sc/n.sc, G. J.The model checker SPIN. IEEE Transactions on software engineering 23 , 5 (1997), 279–295
work page 1997
-
[19]
H/u.sc/a.sc/n.sc/g.sc, D., L/i.sc/u.sc, Q., C/u.sc/i.sc, Q., F/a.sc/n.sc/g.sc, Z., M/a.sc, X., X/u.sc, F., S/h.sc/e.sc/n.sc, L.,T/a.sc/n.sc/g.sc, L., Z/h.sc/o.sc/u.sc, Y., H/u.sc/a.sc/n.sc/g.sc, M., W/e.sc/i.sc, W., L/i.sc/u.sc, C., Z/h.sc/a.sc/n.sc/g.sc, J., L/i.sc, J., W/u.sc, X., S/o.sc/n.sc/g.sc, L., S/u.sc/n.sc, R., Y/u.sc, S., Z/h.sc/a.sc/o.sc, L., ...
work page 2020
-
[20]
A., /a.sc/n.sc/d.sc S/a.sc/n.sc/t.sc/o.sc/s.sc/a.sc, A
J/a.sc/f.sc/f.sc/a.sc/r.sc, J., M/u.sc/r.sc/a.sc/l.sc/i.sc, V., N/a.sc/v.sc/a.sc/s.sc, J. A., /a.sc/n.sc/d.sc S/a.sc/n.sc/t.sc/o.sc/s.sc/a.sc, A. E.Path-sensitive backward slicing. In Static Analysis: 19th International Symposium, SAS 2012, Deauville, France, Sep tember 11-13, 2012. Proceedings 19 (2012), Springer, pp. 231– 247
work page 2012
-
[21]
J/h.sc/a.sc/l.sc/a.sc, R., /a.sc/n.sc/d.sc M/a.sc/j.sc/u.sc/m.sc/d.sc/a.sc/r.sc, R.Path slicing. In Proceedings of the 2005 ACM SIGPLAN Conference on Programmi ng language Design and Implementation (2005), pp. 38–47
work page 2005
-
[22]
K/a.sc/r.sc/b.sc/y.sc/s.sc/h.sc/e.sc/v.sc, A., B/j.sc/oslash.sc/r.sc/n.sc/e.sc/r.sc, N., I/t.sc/z.sc/h.sc/a.sc/k.sc/y.sc, S., R/i.sc/n.sc/e.sc/t.sc/z.sc/k.sc/y.sc, N., /a.sc/n.sc/d.sc S/h.sc/o.sc/h.sc/a.sc/m.sc, S.Property-Directed Inference of Universal Invariants or Proving Their Absence. J. ACM 64, 1 (mar 2017)
work page 2017
-
[23]
K/a.sc/t.sc/s.sc/a.sc/r.sc/a.sc/k.sc/i.sc/s.sc, A., G/a.sc/v.sc/r.sc/i.sc/e.sc/l.sc/a.sc/t.sc/o.sc/s.sc, V., K/a.sc/t.sc/e.sc/b.sc/z.sc/a.sc/d.sc/e.sc/h.sc, M. S., J/o.sc/s.sc/h.sc/i.sc,A., D/r.sc/a.sc/g.sc/o.sc/j.sc/e.sc/v.sc/i.sc/c.sc, A., G/r.sc/o.sc/t.sc, B., /a.sc/n.sc/d.sc N/a.sc/g.sc/a.sc/r.sc/a.sc/j.sc/a.sc/n.sc, V.Her- mes: A fast, fault-tolerant...
work page 2020
-
[24]
Zeus: Locality-aware distributed transactions
K/a.sc/t.sc/s.sc/a.sc/r.sc/a.sc/k.sc/i.sc/s.sc, A., M/a.sc, Y., T/a.sc/n.sc, Z., B/a.sc/i.sc/n.sc/b.sc/r.sc/i.sc/d.sc/g.sc/e.sc, A., B/a.sc/l.sc/k.sc/w.sc/i.sc/l.sc/l.sc, M., D/r.sc/a.sc/g.sc/o.sc/j.sc/e.sc/v.sc/i.sc/c.sc, A., G/r.sc/o.sc/t.sc, B., R/a.sc/d.sc/u.sc/n.sc/o.sc/v.sc/i.sc/c.sc, B., /a.sc/n.sc/d.sc Z/h.sc/a.sc/n.sc/g.sc, Y. Zeus: Locality-awar...
work page 2021
-
[25]
K/o.sc/e.sc/n.sc/i.sc/g.sc, J. R., P/a.sc/d.sc/o.sc/n.sc, O., I/m.sc/m.sc/e.sc/r.sc/m.sc/a.sc/n.sc, N., /a.sc/n.sc/d.sc A/i.sc/k.sc/e.sc/n.sc, A.First-Order Quantified Separators. In Proceedings of the 41st ACM SIGPLAN Conference on Programming Language Design and I mplementation (2020), PLDI 2020, Association for Computing Machinery, p. 703–717
work page 2020
-
[26]
K/o.sc/e.sc/n.sc/i.sc/g.sc, J. R., P/a.sc/d.sc/o.sc/n.sc, O., S/h.sc/o.sc/h.sc/a.sc/m.sc, S., /a.sc/n.sc/d.sc A/i.sc/k.sc/e.sc/n.sc, A.Inferring Invariants with Quantifier Alternations: Taming the Search Space Explosion. In Tools and Algorithms for the Construction and Analysis of Systems (Cham, 2022), D. Fisman and G. Rosu, Eds., Springer International Pu...
work page 2022
-
[27]
L/a.sc/m.sc/p.sc/o.sc/r.sc/t.sc, L.A New Solution of Dijkstra’s Concurrent Programming Problem. Commun. ACM 17 , 8 (aug 1974), 453–455
work page 1974
-
[28]
ACM SIGACT News (Distributed Computing Column) 32, 4 (Whole Number 121, December 2001) (2001), 51–58
L/a.sc/m.sc/p.sc/o.sc/r.sc/t.sc, L.Paxos made simple. ACM SIGACT News (Distributed Computing Column) 32, 4 (Whole Number 121, December 2001) (2001), 51–58
work page 2001
-
[29]
L/a.sc/m.sc/p.sc/o.sc/r.sc/t.sc, L.Specifying Systems: The TLA+ Language and Tools for Hardware and Software Engineers. Addison-Wesley, Jun 2002
work page 2002
-
[30]
http://lamport.azurewebsites.net/tla/inductive-invariant.pdf , 2018
L/a.sc/m.sc/p.sc/o.sc/r.sc/t.sc, L.Using TLC to Check Inductive Invariance. http://lamport.azurewebsites.net/tla/inductive-invariant.pdf , 2018. , Vol. 1, No. 1, Article . Publication date: April 2024. 24 William Schultz, Edward Ashton, Heidi Howard, and Stavro s Tripakis
work page 2018
-
[31]
In USENIX Annual Technical Conference (2022)
M/a.sc, H., A/h.sc/m.sc/a.sc/d.sc, H., G/o.sc/e.sc/l.sc, A., G/o.sc/l.sc/d.sc/w.sc/e.sc/b.sc/e.sc/r.sc, E., J/e.sc/a.sc/n.sc/n.sc/i.sc/n.sc, J./hyphen.scB., K/a.sc/p.sc/r.sc/i.sc/t.sc/s.sc/o.sc/s.sc, M., /a.sc/n.sc/d.sc K/a.sc/s.sc/i.sc/k.sc/c.sc/i.sc, B.Sift: Using Refinement- guided Automation to Verify Complex Distributed Systems. In USENIX Annual Techn...
work page 2022
-
[32]
Springer-Verlag, Berlin, Heidelberg, 1995
M/a.sc/n.sc/n.sc/a.sc, Z., /a.sc/n.sc/d.sc P/n.sc/u.sc/e.sc/l.sc/i.sc, A.Temporal Verification of Reactive Systems: Safety . Springer-Verlag, Berlin, Heidelberg, 1995
work page 1995
-
[33]
Science of Computer Programming 37, 1 (2000), 279–309
M/c.scM/i.sc/l.sc/l.sc/a.sc/n.sc, K.A methodology for hardware verification using compositional model c hecking. Science of Computer Programming 37, 1 (2000), 279–309
work page 2000
-
[34]
O/n.sc/g.sc/a.sc/r.sc/o.sc, D.Consensus: Bridging Theory and Practice. Doctoral thesis (2014)
work page 2014
-
[35]
O/n.sc/g.sc/a.sc/r.sc/o.sc, D., /a.sc/n.sc/d.sc O/u.sc/s.sc/t.sc/e.sc/r.sc/h.sc/o.sc/u.sc/t.sc, J.In Search of an Understandable Consensus Algorithm. In Proceedings of the 2014 USENIX Conference on USENIX Annual Technical Conferen ce (USA, 2014), USENIX ATC’14, USENIX Association, pp. 305–320
work page 2014
-
[36]
P/a.sc/d.sc/o.sc/n.sc, O., I/m.sc/m.sc/e.sc/r.sc/m.sc/a.sc/n.sc, N., S/h.sc/o.sc/h.sc/a.sc/m.sc, S., K/a.sc/r.sc/b.sc/y.sc/s.sc/h.sc/e.sc/v.sc, A., /a.sc/n.sc/d.sc S/a.sc/g.sc/i.sc/v.sc, M.Decidability of Inferring Inductive Invariants. In Proceedings of the 43rd Annual ACM SIGPLAN-SIGACT Symposiu m on Principles of Programming Languages (New York, NY, US...
work page 2016
-
[37]
P/a.sc/d.sc/o.sc/n.sc, O., M/c.scM/i.sc/l.sc/l.sc/a.sc/n.sc, K. L., P/a.sc/n.sc/d.sc/a.sc, A., S/a.sc/g.sc/i.sc/v.sc, M., /a.sc/n.sc/d.sc S/h.sc/o.sc/h.sc/a.sc/m.sc,S. Ivy: Safety Verification by Interactive General- ization. In Proceedings of the 37th ACM SIGPLAN Conference on Programmi ng Language Design and Implementation (New York, NY, USA, 2016), PLDI...
work page 2016
-
[38]
S/c.sc/h.sc/u.sc/l.sc/t.sc/z.sc, W., D/a.sc/r.sc/d.sc/i.sc/k.sc, I., /a.sc/n.sc/d.sc T/r.sc/i.sc/p.sc/a.sc/k.sc/i.sc/s.sc, S.Formal Verification of a Distributed Dynamic Reconfiguration Protoco l. In Proceedings of the 11th ACM SIGPLAN International Conferen ce on Certified Programs and Proofs (Philadelphia, PA, USA, 2022), CPP 2022, Association for Computin...
work page 2022
-
[39]
In 2022 Formal Methods in Computer-Aided Design (FMCAD) (2022), IEEE, pp
S/c.sc/h.sc/u.sc/l.sc/t.sc/z.sc, W., D/a.sc/r.sc/d.sc/i.sc/k.sc, I., /a.sc/n.sc/d.sc T/r.sc/i.sc/p.sc/a.sc/k.sc/i.sc/s.sc, S.Plain and Simple Inductive Invariant Inference for Distributed Protocol s in TLA+. In 2022 Formal Methods in Computer-Aided Design (FMCAD) (2022), IEEE, pp. 273–283
work page 2022
-
[40]
S/h.sc/a.sc/r.sc/m.sc/a.sc, R., /a.sc/n.sc/d.sc A/i.sc/k.sc/e.sc/n.sc, A.From Invariant Checking to Invariant Inference Using Randomized Search. In Computer Aided Verification - 26th International Conference, CA V 201 4, Held as Part of the Vienna Summer of Logic, VSL 2014, Vienna, Austria, July 18-22, 2014. Proceedings (2014), A. Biere and R. Bloem, Eds.,...
work page 2014
-
[41]
T/a.sc/f.sc/t.sc, R., S/h.sc/a.sc/r.sc/i.sc/f.sc, I., M/a.sc/t.sc/e.sc/i.sc, A., V /a.sc/n.scB/e.sc/n.sc/s.sc/c.sc/h.sc/o.sc/t.sc/e.sc/n.sc, N., L/e.sc/w.sc/i.sc/s.sc, J., G/r.sc/i.sc/e.sc/g.sc/e.sc/r.sc, T., N/i.sc/e.sc/m.sc/i.sc, K., W/o.sc/o.sc/d.sc/s.sc, A., B/i.sc/r.sc/z.sc/i.sc/n.sc, A., P/o.sc/s.sc/s.sc, R., B/a.sc/r.sc/d.sc/e.sc/a.sc, P., R/a.sc/n...
work page 2020
-
[42]
T/a.sc/u.sc/b.sc/e.sc, M., L/o.sc/s.sc/a.sc, G., M/c.scM/i.sc/l.sc/l.sc/a.sc/n.sc, K. L., P/a.sc/d.sc/o.sc/n.sc, O., S/a.sc/g.sc/i.sc/v.sc, M., S/h.sc/o.sc/h.sc/a.sc/m.sc, S., W/i.sc/l.sc/c.sc/o.sc/x.sc, J. R., /a.sc/n.sc/d.sc W/o.sc/o.sc/s.sc, D.Modularity for decidability of deductive verification with applications to distribu ted systems. In Proceedings...
work page 2018
-
[43]
T/i.sc/p.sc, F.A survey of program slicing techniques. J. Program. Lang. 3 (1994)
work page 1994
-
[44]
https://github.com/Vanlightly/raft-tlaplus/blob/main/specifications/standard-raft/Raft.tla , 2023
V /a.sc/n.sc/l.sc/i.sc/g.sc/h.sc/t.sc/l.sc/y.sc, J.raft-tlaplus: A TLA+ specification of the Raft distributed consens us algorithm. https://github.com/Vanlightly/raft-tlaplus/blob/main/specifications/standard-raft/Raft.tla , 2023. GitHub reposi- tory
work page 2023
-
[45]
W/i.sc/l.sc/c.sc/o.sc/x.sc, J. R., W/o.sc/o.sc/s.sc, D., P/a.sc/n.sc/c.sc/h.sc/e.sc/k.sc/h.sc/a.sc, P., T/a.sc/t.sc/l.sc/o.sc/c.sc/k.sc, Z., W /a.sc/n.sc/g.sc, X., E/r.sc/n.sc/s.sc/t.sc, M. D., /a.sc/n.sc/d.sc A/n.sc/d.sc/e.sc/r.sc/s.sc/o.sc/n.sc, T. E.Verdi: a framework for implementing and formally verifying distributed systems. In Proceedings of the 36...
work page 2015
-
[46]
R., A/n.sc/t.sc/o.sc/n.sc, S., T/a.sc/t.sc/l.sc/o.sc/c.sc/k.sc, Z., E/r.sc/n.sc/s.sc/t.sc, M
W/o.sc/o.sc/s.sc, D., W/i.sc/l.sc/c.sc/o.sc/x.sc, J. R., A/n.sc/t.sc/o.sc/n.sc, S., T/a.sc/t.sc/l.sc/o.sc/c.sc/k.sc, Z., E/r.sc/n.sc/s.sc/t.sc, M. D.,/a.sc/n.sc/d.sc A/n.sc/d.sc/e.sc/r.sc/s.sc/o.sc/n.sc, T.Planning for Change in a Formal Verification of the Raft Consensus Protocol. In Proceedings of the 5th ACM SIGPLAN Conference on Certified Pr ograms and ...
work page 2016
-
[47]
Y /a.sc/o.sc, J., T/a.sc/o.sc, R., G/u.sc, R., /a.sc/n.sc/d.sc N/i.sc/e.sc/h.sc, J.DuoAI: Fast, Automated Inference of Inductive Invariants for Verifying Distributed Protocols. In 16th USENIX Symposium on Operating Systems Design and Implementation, OSDI 2022, Carlsbad, CA, USA, July 11-13, 2022 (2022), M. K. Aguilera and H. Weatherspoon, Eds., USENIX Ass...
work page 2022
-
[48]
Y /a.sc/o.sc, J., T/a.sc/o.sc, R., G/u.sc, R., N/i.sc/e.sc/h.sc, J., J/a.sc/n.sc/a.sc, S., /a.sc/n.sc/d.sc R/y.sc/a.sc/n.sc, G.DistAI: Data-Driven Automated Invariant Learning for Distributed Protocols. In 15th USENIX Symposium on Operating Systems Design and Imple mentation (OSDI 21) (July 2021), USENIX Association, pp. 405–421
work page 2021
-
[49]
In Correct Hardware Design and Verifi- cation Methods (Berlin, Heidelberg, 1999), L
Y/u.sc, Y., M/a.sc/n.sc/o.sc/l.sc/i.sc/o.sc/s.sc, P., /a.sc/n.sc/d.sc L/a.sc/m.sc/p.sc/o.sc/r.sc/t.sc, L.Model Checking TLA+ Specifications. In Correct Hardware Design and Verifi- cation Methods (Berlin, Heidelberg, 1999), L. Pierre and T. Kropf, Eds., Springer B erlin Heidelberg, pp. 54–66. , Vol. 1, No. 1, Article . Publication date: April 2024
work page 1999
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.