Adaptive Obstacle-Aware Task Assignment and Planning for Heterogeneous Robot Teaming
Pith reviewed 2026-05-18 06:34 UTC · model grok-4.3
The pith
OATH framework assigns tasks to robot teams with obstacle awareness for better scalability and adaptability.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
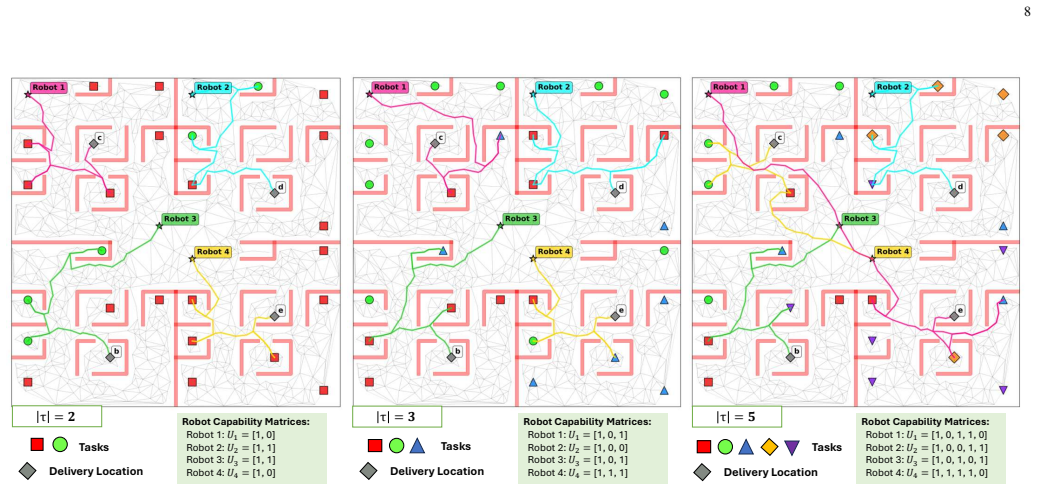
OATH advances MATP by introducing a novel obstacle-aware strategy for task assignment. First, an adaptive Halton sequence map adjusts sampling density based on obstacle distribution. Second, a cluster-auction-selection framework integrates obstacle-aware clustering with weighted auctions and intra-cluster task selection. These mechanisms enable effective coordination among heterogeneous robots while maintaining scalability and suboptimal allocation performance. The framework also leverages an LLM to interpret human instructions and directly guide the planner in real time.
What carries the argument
Adaptive Halton sequence map for obstacle-aware sampling combined with cluster-auction-selection framework for robot coordination.
If this is right
- Improved task assignment quality in obstacle-rich environments
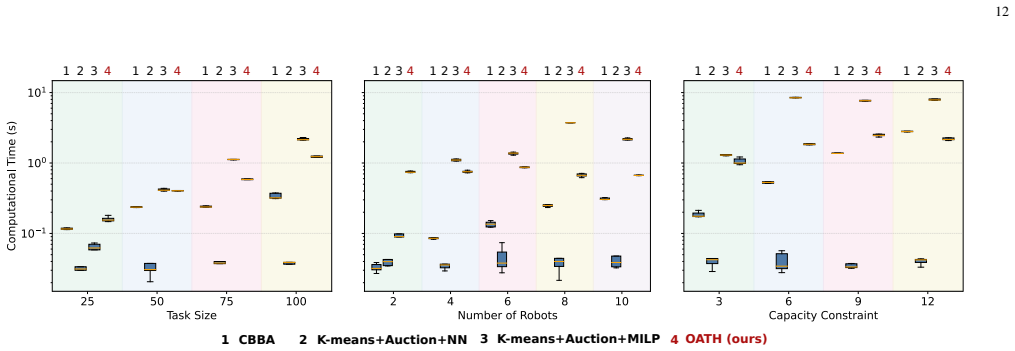
- Greater scalability for handling more robots or tasks
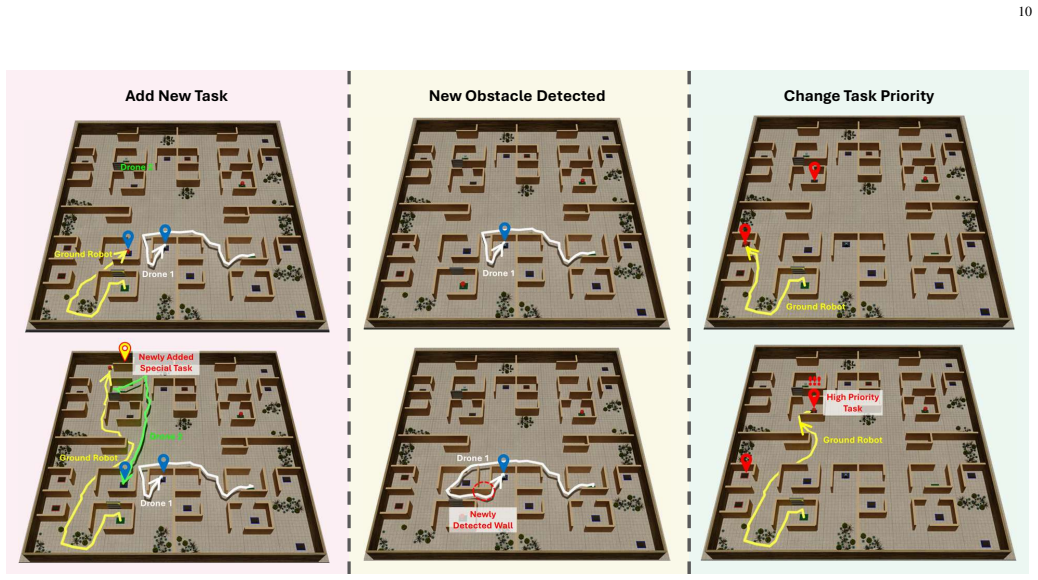
- Enhanced adaptability to dynamic changes in the environment
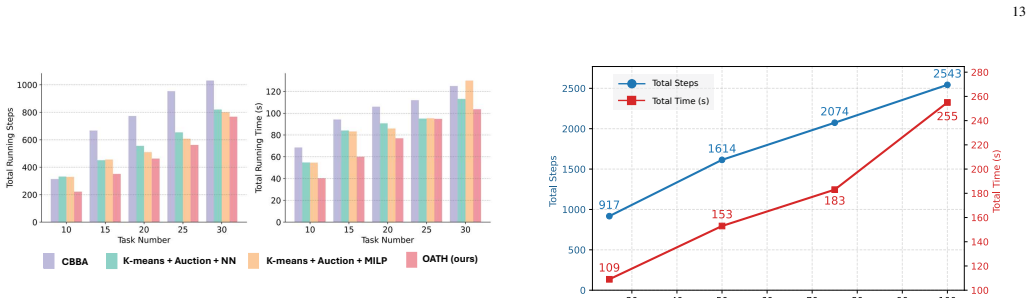
- Superior overall execution performance in simulations and real-world tests
Where Pith is reading between the lines
- Potential application to drone delivery systems in urban settings with buildings as obstacles.
- Further integration with computer vision could allow real-time obstacle map updates from onboard sensors.
- May lead to lower operational costs by minimizing robot travel distances in cluttered areas.
Load-bearing premise
The adaptive Halton sequence map and cluster-auction-selection framework integrate effectively with LLM guidance to deliver scalability and performance improvements in both simulation and real hardware.
What would settle it
An experiment increasing the complexity of obstacles or team size and measuring if improvements in assignment quality and completion time hold compared to baselines.
Figures







read the original abstract
Multi-Agent Task Assignment and Planning (MATP) has attracted growing attention but remains challenging in terms of scalability, spatial reasoning, and adaptability in obstacle-rich environments. To address these challenges, we propose OATH - Adaptive Obstacle-Aware Task Assignment and Planning for Heterogeneous Robot Teaming - which advances MATP by introducing a novel obstacle-aware strategy for task assignment. First, we develop an adaptive Halton sequence map, the first known application of Halton sampling with obstacle-aware adaptation in MATP, which adjusts sampling density based on obstacle distribution. Second, we propose a cluster-auction-selection framework that integrates obstacle-aware clustering with weighted auctions and intra-cluster task selection. These mechanisms jointly enable effective coordination among heterogeneous robots while maintaining scalability and suboptimal allocation performance. In addition, our framework leverages an LLM to interpret human instructions and directly guide the planner in real time. We validate OATH in both NVIDIA Isaac Sim and real-world hardware experiments using TurtleBot platforms, demonstrating substantial improvements in task assignment quality, scalability, adaptability to dynamic changes, and overall execution performance compared to state-of-the-art MATP baselines. A project website is available at https://llm-oath.github.io/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes OATH, a framework for Multi-Agent Task Assignment and Planning (MATP) for heterogeneous robot teams in obstacle-rich environments. It introduces an adaptive Halton sequence map that adjusts sampling density based on obstacle distribution (claimed as the first such application in MATP), a cluster-auction-selection framework that combines obstacle-aware clustering with weighted auctions and intra-cluster task selection, and LLM-based interpretation of human instructions for real-time planner guidance. The approach is validated in NVIDIA Isaac Sim simulations and real-world TurtleBot hardware experiments, with claims of substantial improvements over state-of-the-art MATP baselines in task assignment quality, scalability, adaptability to dynamic changes, and overall execution performance.
Significance. If the performance claims hold under rigorous quantitative evaluation, the work could advance MATP by showing a practical combination of adaptive low-discrepancy sampling, auction-based assignment, and LLM guidance for heterogeneous teams in dynamic obstacle settings. The dual simulation-plus-hardware validation and the explicit novelty claim for obstacle-aware Halton sampling are positive elements. However, the absence of any numerical results, baselines, or statistical details in the abstract substantially weakens the ability to gauge the magnitude or generality of the reported gains.
major comments (2)
- [Abstract] Abstract: the claim of 'substantial improvements' in task assignment quality, scalability, adaptability, and execution performance is unsupported by any quantitative metrics, baseline comparisons, statistical analysis, error bars, or specific numerical results. This directly undermines verification of the central empirical claims.
- [Abstract / Proposed Framework] Abstract / Proposed Framework: no complexity bound or scaling analysis is given for the cluster-auction-selection phase as the number of clusters or degree of robot heterogeneity increases. In addition, no ablation isolates the adaptive Halton component from the LLM guidance or the intra-cluster heuristic, leaving open the possibility that reported gains in Isaac Sim and TurtleBot trials are environment-specific rather than general properties of the framework.
minor comments (1)
- [Abstract] The project website link is a helpful addition for potential reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and have revised the manuscript to incorporate the suggested improvements, particularly strengthening the abstract and adding supporting analyses.
read point-by-point responses
-
Referee: [Abstract] Abstract: the claim of 'substantial improvements' in task assignment quality, scalability, adaptability, and execution performance is unsupported by any quantitative metrics, baseline comparisons, statistical analysis, error bars, or specific numerical results. This directly undermines verification of the central empirical claims.
Authors: We agree that the abstract would be strengthened by including concrete quantitative results to support the performance claims. In the revised manuscript, we have updated the abstract to incorporate key numerical findings from our experiments, such as specific percentage improvements in task completion time and assignment quality relative to baselines, along with references to statistical significance and error bars detailed in the results section. This makes the central empirical claims directly verifiable from the abstract. revision: yes
-
Referee: [Abstract / Proposed Framework] Abstract / Proposed Framework: no complexity bound or scaling analysis is given for the cluster-auction-selection phase as the number of clusters or degree of robot heterogeneity increases. In addition, no ablation isolates the adaptive Halton component from the LLM guidance or the intra-cluster heuristic, leaving open the possibility that reported gains in Isaac Sim and TurtleBot trials are environment-specific rather than general properties of the framework.
Authors: We acknowledge the value of explicit complexity analysis and ablations. We have added a dedicated subsection analyzing the computational complexity of the cluster-auction-selection phase, establishing that it scales as O(C log T + C * R) where C denotes clusters, T tasks, and R robots, remaining efficient even as heterogeneity increases. We have also included new ablation experiments that isolate the adaptive Halton sampling from the LLM guidance and intra-cluster heuristic. These results demonstrate the individual contributions of each component and confirm that performance gains generalize beyond the specific simulation and hardware environments tested. revision: yes
Circularity Check
No circularity: novel integration of adaptive Halton sampling and cluster-auction framework
full rationale
The paper introduces OATH as a new obstacle-aware strategy for MATP, built from an adaptive Halton sequence map (density adjusted by obstacle distribution) and a cluster-auction-selection framework, with LLM guidance for real-time human instruction interpretation. These are presented as first-known applications and novel combinations, validated through empirical comparisons in Isaac Sim and TurtleBot hardware against state-of-the-art baselines. No equations, fitted parameters renamed as predictions, self-definitional reductions, or load-bearing self-citations appear in the derivation; the central claims rest on the described integration and experimental performance gains rather than reducing to inputs by construction.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Optimization techniques for multi-robot task allocation problems: Review on the state- of-the-art,
H. Chakraa, F. Gu ´erin, E. Leclercq, and D. Lefebvre, “Optimization techniques for multi-robot task allocation problems: Review on the state- of-the-art,”Robotics and Autonomous Systems, vol. 168, p. 104492, 2023
work page 2023
-
[2]
A review on multirobot systems in agriculture,
C. Ju, J. Kim, J. Seol, and H. I. Son, “A review on multirobot systems in agriculture,”Computers and Electronics in Agriculture, vol. 202, p. 107336, 2022
work page 2022
-
[3]
A dis- tributed task allocation algorithm for a multi-robot system in healthcare facilities,
G. P. Das, T. M. McGinnity, S. A. Coleman, and L. Behera, “A dis- tributed task allocation algorithm for a multi-robot system in healthcare facilities,”Journal of Intelligent & Robotic Systems, vol. 80, pp. 33–58, 2015
work page 2015
-
[4]
Drone-surveillance for search and rescue in natural disaster,
B. Mishra, D. Garg, P. Narang, and V . Mishra, “Drone-surveillance for search and rescue in natural disaster,”Computer Communications, vol. 156, pp. 1–10, 2020
work page 2020
-
[5]
M. E. Cao, X. Ni, J. Warnke, Y . Han, S. Coogan, and Y . Zhao, “Leverag- ing heterogeneous capabilities in multi-agent systems for environmental conflict resolution,” in2022 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR). IEEE, 2022, pp. 94–101
work page 2022
-
[6]
O. Salzman and R. Stern, “Research challenges and opportunities in multi-agent path finding and multi-agent pickup and delivery problems,” inProceedings of the 19th International Conference on Autonomous Agents and MultiAgent Systems, 2020, pp. 1711–1715
work page 2020
-
[7]
A. Shamsah, J. Jiang, Z. Yoon, S. Coogan, and Y . Zhao, “Terrain- aware model predictive control of heterogeneous bipedal and aerial robot coordination for search and rescue tasks,” in2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 12 352–12 358
work page 2025
-
[8]
Reactive task allocation and planning for quadrupedal and wheeled robot teaming,
Z. Zhou, D. J. Lee, Y . Yoshinaga, S. Balakirsky, D. Guo, and Y . Zhao, “Reactive task allocation and planning for quadrupedal and wheeled robot teaming,” in2022 IEEE 18th International Conference on Automa- tion Science and Engineering (CASE). IEEE, 2022, pp. 2110–2117
work page 2022
-
[9]
Integrated task assignment and path planning for capacitated multi- agent pickup and delivery,
Z. Chen, J. Alonso-Mora, X. Bai, D. D. Harabor, and P. J. Stuckey, “Integrated task assignment and path planning for capacitated multi- agent pickup and delivery,”IEEE Robotics and Automation Letters, vol. 6, no. 3, pp. 5816–5823, 2021
work page 2021
-
[10]
Consensus-based decentralized auctions for robust task allocation,
H.-L. Choi, L. Brunet, and J. P. How, “Consensus-based decentralized auctions for robust task allocation,”IEEE transactions on robotics, vol. 25, no. 4, pp. 912–926, 2009
work page 2009
-
[11]
Decentral task allocation for industrial agv-systems with routing constraints,
M. De Ryck, D. Pissoort, T. Holvoet, and E. Demeester, “Decentral task allocation for industrial agv-systems with routing constraints,”Journal of Manufacturing Systems, vol. 62, pp. 135–144, 2022
work page 2022
-
[12]
Multi-robot auctions for allocation of tasks with temporal constraints,
E. Nunes and M. Gini, “Multi-robot auctions for allocation of tasks with temporal constraints,” inProceedings of the AAAI conference on artificial intelligence, vol. 29, no. 1, 2015
work page 2015
-
[13]
Distributed algorithms for multirobot task assignment with task deadline constraints,
L. Luo, N. Chakraborty, and K. Sycara, “Distributed algorithms for multirobot task assignment with task deadline constraints,”IEEE Trans- actions on Automation Science and Engineering, vol. 12, no. 3, pp. 876–888, 2015. 15
work page 2015
-
[14]
Multi-objective optimisation of multi-robot task allocation with prece- dence constraints
K. Padmanabhan Panchu, M. Rajmohan, R. Sundar, and R. Baskaran, “Multi-objective optimisation of multi-robot task allocation with prece- dence constraints.”Defence Science Journal, vol. 68, no. 2, 2018
work page 2018
-
[15]
Multi-robot task allocation using clustering method,
F. Janati, F. Abdollahi, S. S. Ghidary, M. Jannatifar, J. Baltes, and S. Sadeghnejad, “Multi-robot task allocation using clustering method,” inRobot Intelligence Technology and Applications 4: Results from the 4th International Conference on Robot Intelligence Technology and Applications. Springer, 2016, pp. 233–247
work page 2016
-
[16]
J. Velagi ´c, D. Delimustafi ´c, and D. Osmankovi ´c, “Mobile robot naviga- tion system based on probabilistic road map (prm) with halton sampling of configuration space,” in2014 IEEE 23rd International Symposium on Industrial Electronics (ISIE). IEEE, 2014, pp. 1227–1232
work page 2014
-
[17]
Deterministic sampling-based motion planning: Optimality, complexity, and performance,
L. Janson, B. Ichter, and M. Pavone, “Deterministic sampling-based motion planning: Optimality, complexity, and performance,”The Inter- national Journal of Robotics Research, vol. 37, no. 1, pp. 46–61, 2018
work page 2018
-
[18]
Research on sbmpc algorithm for path planning of rescue and detection robot,
L.-L. Wang and L.-X. Pan, “Research on sbmpc algorithm for path planning of rescue and detection robot,”Discrete Dynamics in Nature and Society, vol. 2020, no. 1, p. 7821942, 2020
work page 2020
-
[19]
Obstacle aware sampling for path planning,
M. Tukan, A. Maalouf, D. Feldman, and R. Poranne, “Obstacle aware sampling for path planning,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 13 676– 13 683
work page 2022
-
[20]
Real-time path planning for robot using op-prm in complex dynamic environment,
L. Ye, J. Chen, and Y . Zhou, “Real-time path planning for robot using op-prm in complex dynamic environment,”Frontiers in Neurorobotics, vol. 16, p. 910859, 2022
work page 2022
-
[21]
J. You, J. Jia, X. Pang, J. Wen, Y . Shi, and J. Zeng, “A novel multi- robot task assignment scheme based on a multi-angle k-means clustering algorithm and a two-stage load-balancing strategy,”Electronics, vol. 12, no. 18, p. 3842, 2023
work page 2023
-
[22]
A. Patil, J. Bae, and M. Park, “An algorithm for task allocation and planning for a heterogeneous multi-robot system to minimize the last task completion time,”Sensors, vol. 22, no. 15, p. 5637, 2022
work page 2022
-
[23]
J. Achiam, S. Adler, S. Agarwal, L. Ahmad, I. Akkaya, F. L. Aleman, D. Almeida, J. Altenschmidt, S. Altman, S. Anadkatet al., “Gpt-4 technical report,”arXiv preprint arXiv:2303.08774, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[24]
A comprehensive capability analysis of gpt-3 and gpt-3.5 series models,
J. Ye, X. Chen, N. Xu, C. Zu, Z. Shao, S. Liu, Y . Cui, Z. Zhou, C. Gong, Y . Shenet al., “A comprehensive capability analysis of gpt-3 and gpt-3.5 series models,”arXiv preprint arXiv:2303.10420, 2023
-
[25]
A. Grattafiori, A. Dubey, A. Jauhri, A. Pandey, A. Kadian, A. Al-Dahle, A. Letman, A. Mathur, A. Schelten, A. Vaughanet al., “The llama 3 herd of models,”arXiv preprint arXiv:2407.21783, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[26]
Gemini 1.5: Unlocking multimodal understanding across millions of tokens of context
G. Team, P. Georgiev, V . I. Lei, R. Burnell, L. Bai, A. Gulati, G. Tanzer, D. Vincent, Z. Pan, S. Wanget al., “Gemini 1.5: Unlocking multimodal understanding across millions of tokens of context,”arXiv preprint arXiv:2403.05530, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[27]
Llm-based multi-agent rein- forcement learning: Current and future directions,
C. Sun, S. Huang, and D. Pompili, “Llm-based multi-agent rein- forcement learning: Current and future directions,”arXiv preprint arXiv:2405.11106, 2024
-
[28]
Autotamp: Autoregressive task and motion planning with llms as translators and checkers,
Y . Chen, J. Arkin, C. Dawson, Y . Zhang, N. Roy, and C. Fan, “Autotamp: Autoregressive task and motion planning with llms as translators and checkers,” in2024 IEEE International conference on robotics and automation (ICRA). IEEE, 2024, pp. 6695–6702
work page 2024
-
[29]
J. X. Liu, Z. Yang, B. Schornstein, S. Liang, I. Idrees, S. Tellex, and A. Shah, “Lang2ltl: Translating natural language commands to temporal specification with large language models,” inWorkshop on Language and Robotics at CoRL 2022, 2022
work page 2022
-
[30]
X. Zhang, H. Qin, F. Wang, Y . Dong, and J. Li, “Lamma-p: General- izable multi-agent long-horizon task allocation and planning with lm- driven pddl planner,”arXiv preprint arXiv:2409.20560, 2024
-
[31]
Smart-llm: Smart multi-agent robot task planning using large language models,
S. S. Kannan, V . L. Venkatesh, and B.-C. Min, “Smart-llm: Smart multi-agent robot task planning using large language models,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 12 140–12 147
work page 2024
-
[32]
Do As I Can, Not As I Say: Grounding Language in Robotic Affordances
M. Ahn, A. Brohan, N. Brown, Y . Chebotar, O. Cortes, B. David, C. Finn, C. Fu, K. Gopalakrishnan, K. Hausmanet al., “Do as i can, not as i say: Grounding language in robotic affordances,”arXiv preprint arXiv:2204.01691, 2022
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[33]
Language models as zero-shot planners: Extracting actionable knowledge for embodied agents,
W. Huang, P. Abbeel, D. Pathak, and I. Mordatch, “Language models as zero-shot planners: Extracting actionable knowledge for embodied agents,” inInternational conference on machine learning. PMLR, 2022, pp. 9118–9147
work page 2022
-
[34]
Large Language Models for Multi-Robot Systems: A Survey
P. Li, Z. An, S. Abrar, and L. Zhou, “Large language models for multi- robot systems: A survey,”arXiv preprint arXiv:2502.03814, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[35]
Vader: Visual affordance detection and error recovery for multi robot human collaboration,
M. Ahn, M. G. Arenas, M. Bennice, N. Brown, C. Chan, B. David, A. Francis, G. Gonzalez, R. Hessmer, T. Jacksonet al., “Vader: Visual affordance detection and error recovery for multi robot human collaboration,”arXiv preprint arXiv:2405.16021, 2024
-
[36]
Conversational language models for human-in-the-loop multi-robot coordination,
W. Hunt, T. Godfrey, and M. D. Soorati, “Conversational language models for human-in-the-loop multi-robot coordination,”arXiv preprint arXiv:2402.19166, 2024
-
[37]
A. Lykov, M. Dronova, N. Naglov, M. Litvinov, S. Satsevich, A. Bazhenov, V . Berman, A. Shcherbak, and D. Tsetserukou, “Llm-mars: Large language model for behavior tree generation and nlp-enhanced di- alogue in multi-agent robot systems,”arXiv preprint arXiv:2312.09348, 2023
-
[38]
Multiple task assignments for cooperating uninhabited aerial vehicles using genetic algorithms,
T. Shima, S. J. Rasmussen, A. G. Sparks, and K. M. Passino, “Multiple task assignments for cooperating uninhabited aerial vehicles using genetic algorithms,”Computers & operations research, vol. 33, no. 11, pp. 3252–3269, 2006
work page 2006
-
[39]
A coalition formation algorithm for multi-robot task allocation in large-scale natural disasters,
C. Mouradian, J. Sahoo, R. H. Glitho, M. J. Morrow, and P. A. Polakos, “A coalition formation algorithm for multi-robot task allocation in large-scale natural disasters,” in2017 13th international wireless communications and mobile computing conference (IWCMC). IEEE, 2017, pp. 1909–1914
work page 2017
-
[40]
Real-time city-scale ridesharing via linear assignment problems,
A. Simonetto, J. Monteil, and C. Gambella, “Real-time city-scale ridesharing via linear assignment problems,”Transportation Research Part C: Emerging Technologies, vol. 101, pp. 208–232, 2019
work page 2019
-
[41]
Multi-robot task allocation and scheduling considering cooperative tasks and precedence constraints,
E. Bischoff, F. Meyer, J. Inga, and S. Hohmann, “Multi-robot task allocation and scheduling considering cooperative tasks and precedence constraints,” in2020 IEEE international conference on systems, man, and cybernetics (SMC). IEEE, 2020, pp. 3949–3956
work page 2020
-
[42]
Auctions for multi-robot task allocation in communication limited environments,
M. Otte, M. J. Kuhlman, and D. Sofge, “Auctions for multi-robot task allocation in communication limited environments,”Autonomous Robots, vol. 44, pp. 547–584, 2020
work page 2020
-
[43]
A sequential task addition distributed assignment algorithm for multi-robot systems,
N. Lindsay, R. K. Buehling, and L. Sun, “A sequential task addition distributed assignment algorithm for multi-robot systems,”Journal of Intelligent & Robotic Systems, vol. 102, no. 2, p. 51, 2021
work page 2021
-
[44]
Group-based distributed auction algorithms for multi-robot task as- signment,
X. Bai, A. Fielbaum, M. Kronm ¨uller, L. Knoedler, and J. Alonso-Mora, “Group-based distributed auction algorithms for multi-robot task as- signment,”IEEE Transactions on Automation Science and Engineering, vol. 20, no. 2, pp. 1292–1303, 2022
work page 2022
-
[45]
W. Zhao, Q. Meng, and P. W. Chung, “A heuristic distributed task allocation method for multivehicle multitask problems and its application to search and rescue scenario,”IEEE transactions on cybernetics, vol. 46, no. 4, pp. 902–915, 2015
work page 2015
-
[46]
A. Agrawal, A. S. Bedi, and D. Manocha, “Rtaw: An attention inspired reinforcement learning method for multi-robot task allocation in ware- house environments,”arXiv preprint arXiv:2209.05738, 2022
-
[47]
L. Ratnabala, A. Fedoseev, R. Peter, and D. Tsetserukou, “Magnnet: Multi-agent graph neural network-based efficient task allocation for autonomous vehicles with deep reinforcement learning,”arXiv preprint arXiv:2502.02311, 2025
-
[48]
Z. Zhang, X. Jiang, Z. Yang, S. Ma, J. Chen, and W. Sun, “Scalable multi-robot task allocation using graph deep reinforcement learning with graph normalization,”Electronics, vol. 13, no. 8, p. 1561, 2024
work page 2024
-
[49]
Towards learning-based distributed task allocation approach for multi- robot system,
Z. Chekakta, N. Aouf, S. Govindaraj, F. Polisano, and G. De Cubber, “Towards learning-based distributed task allocation approach for multi- robot system,” in2024 10th International Conference on Automation, Robotics and Applications (ICARA). IEEE, 2024, pp. 34–39
work page 2024
-
[50]
Multi-goal multi-agent pickup and delivery,
Q. Xu, J. Li, S. Koenig, and H. Ma, “Multi-goal multi-agent pickup and delivery,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 9964–9971
work page 2022
-
[51]
Conflict- based search with optimal task assignment,
W. H ¨onig, S. Kiesel, A. Tinka, J. Durham, and N. Ayanian, “Conflict- based search with optimal task assignment,” inProceedings of the International Joint Conference on Autonomous Agents and Multiagent Systems, 2018
work page 2018
-
[52]
Lifelong Multi-Agent Path Finding for Online Pickup and Delivery Tasks
H. Ma, J. Li, T. Kumar, and S. Koenig, “Lifelong multi-agent path finding for online pickup and delivery tasks,”arXiv preprint arXiv:1705.10868, 2017
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[53]
A survey of optimization-based task and motion planning: From classical to learning approaches,
Z. Zhao, S. Cheng, Y . Ding, Z. Zhou, S. Zhang, D. Xu, and Y . Zhao, “A survey of optimization-based task and motion planning: From classical to learning approaches,”IEEE/ASME Transactions on Mechatronics, 2024
work page 2024
-
[54]
Text2motion: From natural language instructions to feasible plans,
K. Lin, C. Agia, T. Migimatsu, M. Pavone, and J. Bohg, “Text2motion: From natural language instructions to feasible plans,”Autonomous Robots, vol. 47, no. 8, pp. 1345–1365, 2023
work page 2023
-
[55]
Translating natural language to planning goals with large-language models,
Y . Xie, C. Yu, T. Zhu, J. Bai, Z. Gong, and H. Soh, “Translating natural language to planning goals with large-language models,”arXiv preprint arXiv:2302.05128, 2023
-
[56]
LLM+P: Empowering Large Language Models with Optimal Planning Proficiency
B. Liu, Y . Jiang, X. Zhang, Q. Liu, S. Zhang, J. Biswas, and P. Stone, “Llm+ p: Empowering large language models with optimal planning proficiency,”arXiv preprint arXiv:2304.11477, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[57]
Auto- matic behavior tree expansion with llms for robotic manipulation,
J. Styrud, M. Iovino, M. Norrl ¨of, M. Bj ¨orkman, and C. Smith, “Auto- matic behavior tree expansion with llms for robotic manipulation,”arXiv preprint arXiv:2409.13356, 2024. 16
-
[58]
J. X. Liu, A. Shah, G. Konidaris, S. Tellex, and D. Paulius, “Lang2ltl-2: Grounding spatiotemporal navigation commands using large language and vision-language models,” in2024 IEEE/RSJ International Confer- ence on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 2325– 2332
work page 2024
-
[59]
Modern hierarchical, agglomerative clustering algorithms
D. M ¨ullner, “Modern hierarchical, agglomerative clustering algorithms,” arXiv preprint arXiv:1109.2378, 2011
work page internal anchor Pith review Pith/arXiv arXiv 2011
-
[60]
Y . Yuan, P. Yang, H. Jiang, and T. Shi, “A multi-robot task allocation method based on the synergy of the k-means++ algorithm and the particle swarm algorithm,”Biomimetics, vol. 9, no. 11, p. 694, 2024
work page 2024
-
[61]
Integer programming formulation of traveling salesman problems,
C. E. Miller, A. W. Tucker, and R. A. Zemlin, “Integer programming formulation of traveling salesman problems,”Journal of the ACM (JACM), vol. 7, no. 4, pp. 326–329, 1960
work page 1960
-
[62]
Fast ltl to b ¨uchi automata translation,
P. Gastin and D. Oddoux, “Fast ltl to b ¨uchi automata translation,” in International Conference on Computer Aided Verification. Springer, 2001, pp. 53–65
work page 2001
-
[63]
J. Ren, H. Miller, K. M. Feigh, S. Coogan, and Y . Zhao, “Ltl-d*: Incrementally optimal replanning for feasible and infeasible tasks in linear temporal logic specifications,” in2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2024, pp. 4495–4502
work page 2024
-
[64]
Fast replanning for navigation in unknown terrain,
S. Koenig and M. Likhachev, “Fast replanning for navigation in unknown terrain,”IEEE transactions on robotics, vol. 21, no. 3, pp. 354–363, 2005
work page 2005
-
[65]
NVIDIA, “Nvidia isaac sim,” https://developer.nvidia.com/isaac/sim, 2025, accessed: 2025-10-09
work page 2025
-
[66]
A. Shamsah, Z. Gu, J. Warnke, S. Hutchinson, and Y . Zhao, “Integrated task and motion planning for safe legged navigation in partially observ- able environments,”IEEE Transactions on Robotics, vol. 39, no. 6, pp. 4913–4934, 2023
work page 2023
-
[67]
J. Ren, X. Lin, R. Mineyev, K. M. Feigh, S. Coogan, and Y . Zhao, “Accelerating signal-temporal-logic-based task and motion planning of bipedal navigation using benders decomposition,”arXiv preprint arXiv:2508.13407, 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.