Robust Time-Varying Control Barrier Functions with Sector-Bounded Nonlinearities
Pith reviewed 2026-05-17 21:49 UTC · model grok-4.3
The pith
Robust time-varying control barrier functions ensure safety for all admissible input nonlinearities by using pointwise quadratic constraints.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper establishes that a class of robust time-varying control barrier functions can be defined for plants with control-dependent nonlinearities whose input-output maps obey known pointwise-in-time quadratic constraints. These functions produce a safety filter that renders the time-varying safe set robustly forward invariant for every admissible nonlinearity while minimizing the deviation from a given baseline control law. Online implementation reduces to a second-order cone program, and explicit feasibility conditions are supplied when the input is restricted to a ball.
What carries the argument
The robust time-varying control barrier function that incorporates pointwise-in-time quadratic constraints to bound the admissible set of input nonlinearities and thereby guarantees safety over that entire set.
If this is right
- The safety filter can be computed in real time by solving a second-order cone program at each step.
- Safety holds simultaneously for every nonlinearity whose behavior lies inside the quadratic bounds.
- The baseline controller command is altered only when necessary to maintain the safety guarantee.
- Feasibility of the program is assured under stated conditions when the input lies inside a ball.
Where Pith is reading between the lines
- Tighter or data-driven quadratic bounds would reduce conservatism of the resulting filter.
- The same constraint technique could supply safety certificates while learning actuator nonlinearities online.
- The approach may extend to other actuation uncertainties where only input-output sector bounds are known.
Load-bearing premise
The derivation assumes that the input-output behavior of the actual nonlinearity satisfies known quadratic constraints that remain valid at every time.
What would settle it
Apply the safety filter to a closed-loop trajectory whose nonlinearity satisfies the quadratic constraints yet drives the state outside the time-varying safe set; such a violation would falsify the robustness claim.
Figures
read the original abstract
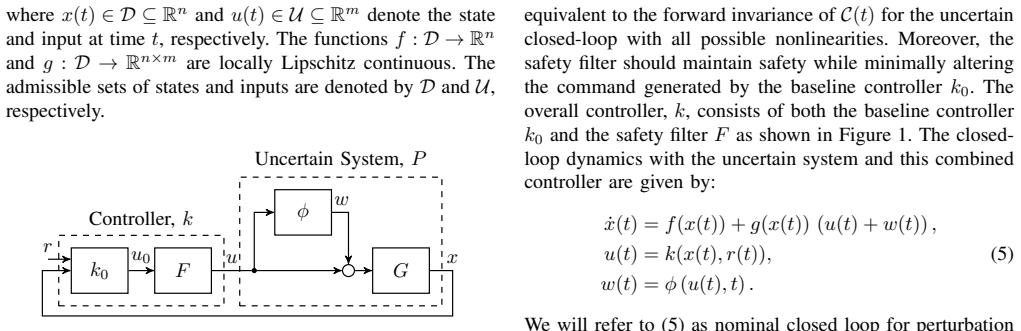
This paper presents a novel approach for ensuring safe operation of systems subject to input nonlinearities and time-varying safety constraints. We extend the time-varying barrier function framework to address time-varying safety constraints and explicitly account for control-dependent nonlinearities at the plant input. Guaranteed bounds on the input-output behavior of these nonlinearities are provided through pointwise-in-time quadratic constraints. The result is a class of robust time-varying control barrier functions that define a safety filter. This filter ensures robust safety for all admissible nonlinearities while minimally modifying the command generated by a baseline controller. We derive a second-order cone program (SOCP) to compute this safety filter online and provide novel feasibility conditions for ball-constrained inputs. The proposed approach is demonstrated on a spacecraft docking maneuver.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper extends time-varying control barrier functions (TV-CBFs) to systems with control-dependent sector-bounded nonlinearities by characterizing admissible input-output maps via pointwise-in-time quadratic constraints. It derives a robust safety filter as a second-order cone program (SOCP) that enforces forward invariance of a time-varying safe set for every nonlinearity satisfying the quadratic bounds while minimally modifying a nominal controller. Novel feasibility conditions are given for ball-constrained inputs, and the method is illustrated on a spacecraft docking maneuver.
Significance. If the quadratic constraints are known a priori and hold for the true nonlinearity at every instant and admissible control, the framework supplies a computationally tractable, robust safety certificate that directly incorporates actuator nonlinearities into the TV-CBF condition. This addresses a practical gap between idealized CBF theory and real actuators, and the SOCP formulation plus explicit feasibility conditions are concrete strengths that could enable online implementation in aerospace and robotics.
major comments (3)
- [§3.3, Eq. (18)] §3.3, Eq. (18): The robust CBF inequality is obtained by substituting the quadratic constraint relaxation directly into the Lie derivative of the barrier function. This substitution certifies safety only if the supplied quadratic bounds are satisfied by the actual control-dependent nonlinearity for every admissible u(t) at each t; the manuscript provides no general procedure to compute or validate these pointwise bounds when the nonlinearity depends on u, which is load-bearing for the claimed robust guarantee.
- [§4.1, Theorem 2] §4.1, Theorem 2: The feasibility conditions for ball-constrained inputs are derived under the assumption that the quadratic forms are known and valid. If the true nonlinearity can exit the assumed sector due to unmodeled effects (e.g., saturation limits that vary with state or time), the SOCP solution no longer guarantees forward invariance; the paper does not discuss how to obtain or tighten these bounds for concrete actuator models.
- [§5] §5, spacecraft docking example: The numerical results show the safety filter in operation, but the explicit quadratic constraint matrices used for the input nonlinearities (e.g., thruster or attitude actuator maps) are not reported, nor is any verification that the true dynamics remain inside the assumed sectors for the applied controls. This makes it impossible to assess the tightness of the bounds or the conservatism of the resulting filter.
minor comments (3)
- [§2] Notation for the time-varying safe set and its boundary should be introduced once in §2 and used consistently; occasional reuse of h(t,x) for both the barrier and its level set is confusing.
- [Figure 3] Figure 3 (SOCP solution trajectories) would benefit from an additional panel showing the quadratic constraint violation margin over time to illustrate how close the true nonlinearity stays to the assumed bound.
- [Abstract] The abstract states that 'feasibility conditions for ball-constrained inputs' are provided; this should be cross-referenced explicitly to Theorem 2 in the introduction.
Simulated Author's Rebuttal
We thank the referee for the thorough review and constructive feedback on our manuscript. The comments correctly identify areas where additional clarification and details would strengthen the presentation of the robust TV-CBF framework and its practical application. We address each major comment below and will make corresponding revisions to the manuscript.
read point-by-point responses
-
Referee: [§3.3, Eq. (18)] §3.3, Eq. (18): The robust CBF inequality is obtained by substituting the quadratic constraint relaxation directly into the Lie derivative of the barrier function. This substitution certifies safety only if the supplied quadratic bounds are satisfied by the actual control-dependent nonlinearity for every admissible u(t) at each t; the manuscript provides no general procedure to compute or validate these pointwise bounds when the nonlinearity depends on u, which is load-bearing for the claimed robust guarantee.
Authors: We agree that the robust safety certificate in Eq. (18) holds only when the quadratic constraints are satisfied by the true nonlinearity. The manuscript treats these pointwise quadratic bounds as given inputs derived from the actuator model, consistent with standard practice in robust control using quadratic constraints. To address the referee's concern, we will add a dedicated paragraph in §3.3 outlining a general procedure: for a known nonlinearity f(u,t), the tightest quadratic bounds can be obtained by solving a semidefinite program that minimizes the conservatism subject to the sector condition holding over the admissible input set at each t. This addition will include a brief example for common saturations and references to related techniques in the quadratic constraint literature. revision: yes
-
Referee: [§4.1, Theorem 2] §4.1, Theorem 2: The feasibility conditions for ball-constrained inputs are derived under the assumption that the quadratic forms are known and valid. If the true nonlinearity can exit the assumed sector due to unmodeled effects (e.g., saturation limits that vary with state or time), the SOCP solution no longer guarantees forward invariance; the paper does not discuss how to obtain or tighten these bounds for concrete actuator models.
Authors: We concur that the feasibility conditions in Theorem 2 presuppose valid quadratic forms. The theorem focuses on the mathematical derivation under this assumption. In the revision, we will append a remark after Theorem 2 discussing practical bound selection for concrete actuators. This will cover methods such as worst-case analysis over bounded variations in saturation limits and the use of more conservative (larger) quadratic forms to account for unmodeled state- or time-dependent effects, thereby preserving the forward-invariance guarantee at the cost of some additional conservatism. revision: yes
-
Referee: [§5] §5, spacecraft docking example: The numerical results show the safety filter in operation, but the explicit quadratic constraint matrices used for the input nonlinearities (e.g., thruster or attitude actuator maps) are not reported, nor is any verification that the true dynamics remain inside the assumed sectors for the applied controls. This makes it impossible to assess the tightness of the bounds or the conservatism of the resulting filter.
Authors: We thank the referee for highlighting the need for greater transparency in the example. In the revised manuscript, we will explicitly report the quadratic constraint matrices (including the specific Q, R, and S terms) employed for the thruster and attitude actuator nonlinearities in §5. We will also add a verification subsection or paragraph that confirms the true simulated dynamics remain within the assumed sectors, for instance by reporting the maximum value of the quadratic form over the closed-loop trajectory and noting that it remains non-positive as required. revision: yes
Circularity Check
No significant circularity; derivation proceeds from assumed quadratic constraints
full rationale
The paper takes pointwise-in-time quadratic constraints on the input nonlinearities as an explicit modeling assumption supplied by the user. From these bounds it derives the robust time-varying CBF condition, the associated SOCP safety filter, and feasibility conditions for ball-constrained inputs. No equation or step reduces the final safety guarantee to a fitted parameter, a self-citation chain, or a renaming of the input data; the central claim remains an independent consequence of standard CBF theory applied to the given sector bounds. The derivation is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The input nonlinearities satisfy known pointwise-in-time quadratic constraints that bound their input-output behavior.
- standard math The barrier function is sufficiently differentiable and the system has relative degree one with respect to the barrier.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
sup u inf w∈W(u) [L̄²f h + L̃g L̄f h (u+w)] ≥ −2α L̄f h − α² h (Def. 6, Eq. 12); w∗(u) = −θ||u||² L̃g L̄f h / ||L̃g L̄f h||² (Eq. 13); resulting SOCP (Eq. 18)
-
IndisputableMonolith/Foundation/BranchSelection.leanbranch_selection unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
pointwise-in-time quadratic constraints … sector [−θ,θ] (Eq. 2–3)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Control barrier function based quadratic programs for safety critical systems,
A. D. Ames, X. Xu, J. W. Grizzle, and P. Tabuada, “Control barrier function based quadratic programs for safety critical systems,”IEEE Transactions on Automatic Control, vol. 62, no. 8, pp. 3861–3876, Aug. 2017
work page 2017
-
[2]
Control barrier functions: Theory and applications,
A. D. Ames, S. Coogan, M. Egerstedt, G. Notomista, K. Sreenath, and P. Tabuada, “Control barrier functions: Theory and applications,” inEuropean Control Conference, 2019, pp. 3420–3431
work page 2019
-
[3]
Q. Nguyen and K. Sreenath, “Exponential control barrier functions for enforcing high relative-degree safety-critical constraints,” inAmerican Control Conference, 2016, pp. 322–328
work page 2016
-
[4]
Control barrier functions for systems with high relative degree,
W. Xiao and C. Belta, “Control barrier functions for systems with high relative degree,” inIEEE Conference on Decision and Control, 2019, pp. 474–479
work page 2019
-
[5]
High-order barrier functions: Robustness, safety, and performance-critical control,
X. Tan, W. S. Cortez, and D. V . Dimarogonas, “High-order barrier functions: Robustness, safety, and performance-critical control,”IEEE Transactions on Automatic Control, vol. 67, no. 6, pp. 3021–3028, 2021
work page 2021
-
[6]
H. Wang, J. Peng, J. Xu, F. Zhang, and Y . Wang, “High-order control barrier functions-based optimization control for time-varying nonlinear systems with full-state constraints: A dynamic sub-safe set approach,” International Journal of Robust and Nonlinear Control, vol. 33, no. 8, pp. 4490–4503, 2023
work page 2023
-
[7]
Constrained control of input–output linearizable systems using control sharing barrier functions,
X. Xu, “Constrained control of input–output linearizable systems using control sharing barrier functions,”Automatica, vol. 87, pp. 195–201, 2018
work page 2018
-
[8]
Control barrier functions for signal temporal logic tasks,
L. Lindemann and D. V . Dimarogonas, “Control barrier functions for signal temporal logic tasks,”IEEE Control Systems Letters, vol. 3, no. 1, pp. 96–101, 2018
work page 2018
-
[9]
Learning for safety- critical control with control barrier functions,
A. Taylor, A. Singletary, Y . Yue, and A. Ames, “Learning for safety- critical control with control barrier functions,” inProceedings of the 2nd Conference on Learning for Dynamics and Control, ser. Proceedings of Machine Learning Research, vol. 120. PMLR, 10–11 Jun 2020, pp. 708–717
work page 2020
-
[10]
arXiv preprint arXiv:2004.07584 , year =
J. Choi, F. Castaneda, C. J. Tomlin, and K. Sreenath, “Reinforcement learning for safety-critical control under model uncertainty, using con- trol lyapunov functions and control barrier functions,”arXiv preprint arXiv:2004.07584, 2020
-
[11]
F. Blanchini and S. Miani,Set-theoretic methods in control. Springer, 2015
work page 2015
-
[12]
Robust control barrier functions with sector-bounded uncertainties,
J. Buch, S.-C. Liao, and P. Seiler, “Robust control barrier functions with sector-bounded uncertainties,”IEEE Control Systems Letters, vol. 6, pp. 1994–1999, 2021
work page 1994
-
[13]
Control barrier functions with unmodeled input dynamics using integral quadratic constraints,
P. Seiler, M. Jankovic, and E. Hellstrom, “Control barrier functions with unmodeled input dynamics using integral quadratic constraints,” IEEE Control Systems Letters, vol. 6, pp. 1664–1669, 2021
work page 2021
-
[14]
Robust safety-critical control for dy- namic robotics,
Q. Nguyen and K. Sreenath, “Robust safety-critical control for dy- namic robotics,”IEEE Transactions on Automatic Control, vol. 67, no. 3, pp. 1073–1088, 2022
work page 2022
-
[15]
T. Pati and S. Z. Yong, “Robust control barrier functions for control affine systems with time-varying parametric uncertainties,”IFAC- PapersOnLine, vol. 56, no. 2, pp. 10 588–10 594, 2023
work page 2023
-
[16]
Robust control barrier–value functions for safety-critical control,
J. J. Choi, D. Lee, K. Sreenath, C. J. Tomlin, and S. L. Herbert, “Robust control barrier–value functions for safety-critical control,” in IEEE Conference on Decision and Control, 2021, pp. 6814–6821
work page 2021
-
[17]
Time-varying soft-maximum control barrier functions for safety in an a priori unknown environment,
A. Safari and J. B. Hoagg, “Time-varying soft-maximum control barrier functions for safety in an a priori unknown environment,” in American Control Conference, 2024, pp. 3698–3703
work page 2024
-
[18]
Safe control synthe- sis using environmentally robust control barrier functions,
V . Hamdipoor, N. Meskin, and C. G. Cassandras, “Safe control synthe- sis using environmentally robust control barrier functions,”European Journal of Control, vol. 74, p. 100840, 2023
work page 2023
-
[19]
J. Huang, H. Wang, K. Margellos, and P. Goulart, “Predictive control barrier functions: Bridging model predictive control and control barrier functions,”arXiv preprint arXiv:2502.08400, 2025
-
[20]
I. Tezuka, T. Kuramoto, and H. Nakamura, “Input-to-state con- strained safety zeroing control barrier function and its application to time-varying obstacle avoidance for electric wheelchair,”IFAC- PapersOnLine, vol. 55, no. 41, pp. 44–51, 2022
work page 2022
-
[21]
Robust adaptive time-varying control barrier function with application to robotic surface treatment,
Y . Kim and C. Sloth, “Robust adaptive time-varying control barrier function with application to robotic surface treatment,” 2025
work page 2025
-
[22]
H. K. Khalil,Nonlinear systems. Prentice hall Upper Saddle River, NJ, 2002, vol. 3
work page 2002
-
[23]
Robust control barrier functions with sector-bounded uncertainties,
J. Buch, S.-C. Liao, and P. Seiler, “Robust control barrier functions with sector-bounded uncertainties,”arXiv preprint arXiv:2109.02537, 2021
-
[24]
G. C. Calafiore and L. El Ghaoui,Optimization models. Cambridge University Press, 2014
work page 2014
-
[25]
A comparison of alternative intervention strategies for un- intended roadway departure URD control,
A. Alleyne, “A comparison of alternative intervention strategies for un- intended roadway departure URD control,”Vehicle System Dynamics, vol. 27, no. 3, pp. 157–186, 1997
work page 1997
-
[26]
Brush tire model with increased flexibility,
J. Svendenius and B. Wittenmark, “Brush tire model with increased flexibility,” inEuropean Control Conference, 2003, pp. 1863–1868
work page 2003
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.