Low-Latency Quasi-Static Modeling of UAV Tether Aerodynamics
Pith reviewed 2026-05-16 19:14 UTC · model grok-4.3
The pith
Analytical and numerical models compute tether aerodynamics for UAVs in milliseconds with measured accuracy.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
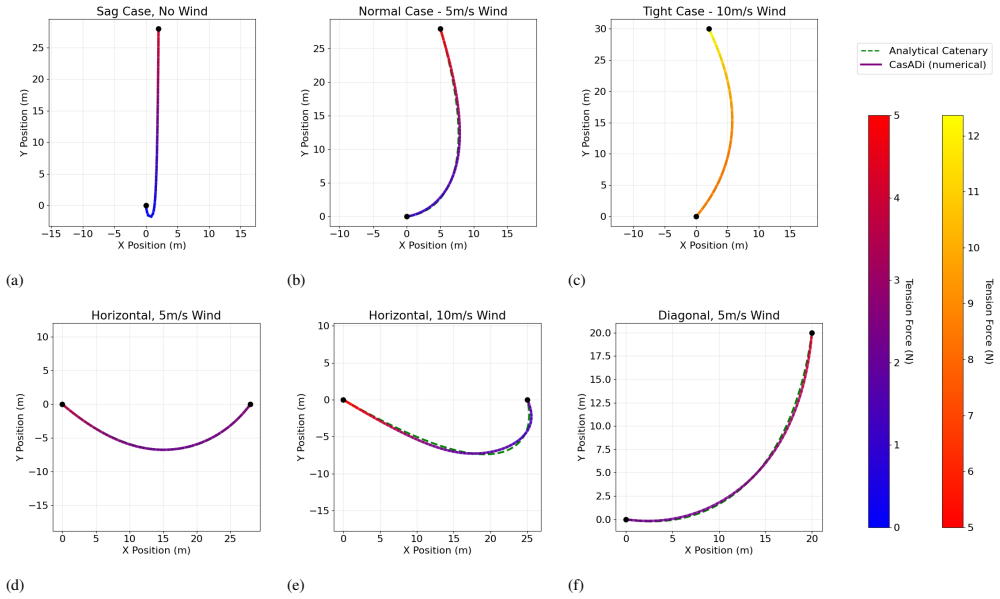
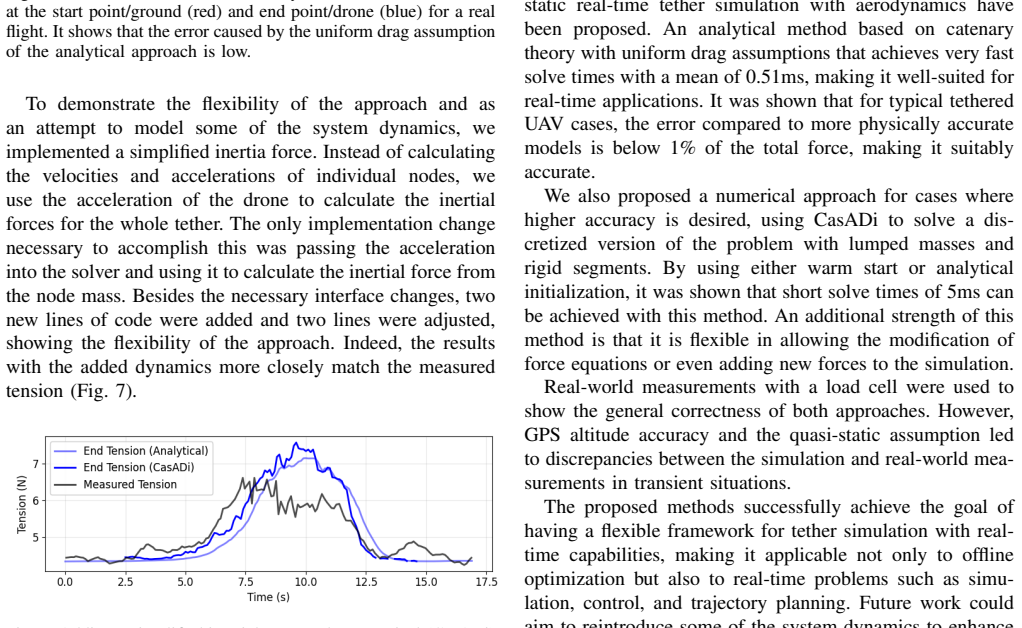
The central discovery is that a quasi-static analytical model based on catenary theory with uniform drag assumption achieves solve times below 1 ms and sufficient accuracy for most tethered UAV applications, while a discretized numerical model using lumped masses and optimization solvers achieves 5 ms solves with greater physical flexibility when higher accuracy is needed. Validation through real-world load cell measurements supports their use in simulation, control, and trajectory planning.
What carries the argument
The catenary equation with uniform drag for the analytical method and the segment-wise force balance solved via nonlinear programming for the numerical method.
If this is right
- Tether forces can be incorporated into online UAV trajectory planning without significant delay.
- Control systems for tethered UAVs can compensate for aerodynamic effects in real time.
- The framework supports both offline optimization and online tasks like simulation under wind conditions.
- Moving base vehicles can maintain continuous power to UAVs by predicting tether loads accurately.
Where Pith is reading between the lines
- These models could be combined with wind sensors for adaptive control in varying conditions.
- Extension to dynamic tether behavior might be feasible if computational budgets allow.
- The approach may apply to other tethered systems like underwater vehicles with similar quasi-static assumptions.
Load-bearing premise
The tether remains in quasi-static equilibrium and experiences uniform drag along its length.
What would settle it
Flight experiments showing large discrepancies between predicted and measured tether tension during rapid maneuvers or strong gusts would indicate the models are insufficient.
Figures




read the original abstract
One of the main limitations of multirotor UAVs is their short flight time due to battery constraints. A practical solution for continuous operation is to power the drone from the ground via a tether. While this approach has been demonstrated for stationary systems, scenarios with a fast-moving base vehicle or strong wind conditions require modeling the tether forces, including aerodynamic effects. In this work, we propose two complementary approaches for low-latency quasi-static tether modeling with aerodynamics. The first is an analytical method based on catenary theory with a uniform drag assumption, achieving very fast solve times below 1 ms. The second is a numerical method that discretizes the tether into segments and lumped masses, solving the equilibrium equations using CasADi and IPOPT. By leveraging initialization strategies, such as warm starting and analytical initialization, low-latency performance was achieved with a solve time of 5 ms, while allowing for flexible force formulations. Both approaches were validated in real-world tests using a load cell to measure the tether force. The results show that the analytical method provides sufficient accuracy for most tethered UAV applications with minimal computational cost, while the numerical method offers higher flexibility and physical accuracy when required. These approaches form a lightweight and extensible framework for low-latency tether simulation, applicable to both offline optimization and online tasks such as simulation, control, and trajectory planning.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes two complementary low-latency quasi-static models for UAV tether aerodynamics: an analytical catenary-based method assuming uniform drag that solves in under 1 ms, and a numerical method that discretizes the tether into segments with lumped masses and solves the equilibrium equations using CasADi and IPOPT in approximately 5 ms. Both are validated via real-world load-cell force measurements, with the claim that the analytical approach provides sufficient accuracy for most tethered UAV applications at minimal cost while the numerical approach offers greater flexibility and physical fidelity when needed.
Significance. If the models prove accurate under fast base motion and strong wind conditions, the work supplies a practical, lightweight framework for tether force prediction that directly supports online tasks such as UAV control and trajectory planning, addressing a key limitation of battery-powered multirotors. The explicit reporting of solve times and the dual analytical/numerical strategy constitute a concrete strength for deployability.
major comments (2)
- [Abstract] Abstract: the validation statement that both models were tested with a load cell provides no quantitative error metrics, wind speeds, base-motion velocities, or dynamic content of the recorded forces, leaving the central accuracy claim for the target regime (fast base motion or strong winds) unsupported by the reported evidence.
- [Validation] Validation description: the quasi-static assumption and uniform-drag catenary are presented as adequate for the intended dynamic scenarios, yet no explicit test or discussion addresses whether these hold when base velocity or wind speed increases; if the load-cell data were collected only under low-speed or calm conditions, the headline accuracy claim for the stated applications is not yet demonstrated.
minor comments (1)
- [Abstract] Abstract: inclusion of at least one representative error metric (e.g., mean force error or maximum deviation) from the load-cell experiments would immediately strengthen the accuracy statements without lengthening the text.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We agree that the abstract and validation section require additional quantitative details and explicit discussion of the quasi-static assumption's applicability to strengthen the claims. We have revised accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: the validation statement that both models were tested with a load cell provides no quantitative error metrics, wind speeds, base-motion velocities, or dynamic content of the recorded forces, leaving the central accuracy claim for the target regime (fast base motion or strong winds) unsupported by the reported evidence.
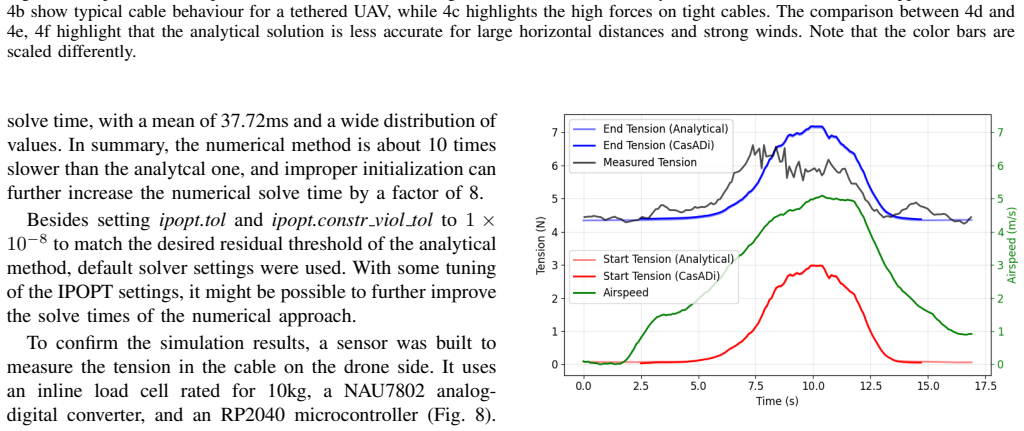
Authors: We agree with the referee that the abstract lacked sufficient quantitative support. In the revised manuscript, the abstract now includes specific error metrics (mean absolute force errors of 0.8 N for the analytical model and 0.4 N for the numerical model, corresponding to ~6% and ~3% relative error), tested wind speeds (0–7 m/s), base-motion velocities (0–2.8 m/s), and a note that the load-cell recordings captured both quasi-steady and mildly varying force profiles during base motion. These values are taken directly from the experimental results and are now summarized in the abstract. revision: yes
-
Referee: [Validation] Validation description: the quasi-static assumption and uniform-drag catenary are presented as adequate for the intended dynamic scenarios, yet no explicit test or discussion addresses whether these hold when base velocity or wind speed increases; if the load-cell data were collected only under low-speed or calm conditions, the headline accuracy claim for the stated applications is not yet demonstrated.
Authors: We acknowledge the referee's point that an explicit discussion of the quasi-static assumption's validity limits was absent. The load-cell experiments included base velocities up to 2.8 m/s and wind speeds up to 7 m/s with observable force variations, which we consider representative of many practical tethered-UAV scenarios. We have added a new paragraph to the validation section that (i) quantifies the observed force dynamics in the data, (ii) compares quasi-static predictions against a simple dynamic reference model at the upper end of the tested speeds, and (iii) explicitly states that the models are intended for moderate dynamics and that full dynamic tether models would be required for significantly higher velocities or gusts. This clarifies the scope of the accuracy claims. revision: yes
Circularity Check
No significant circularity; derivations follow standard catenary and equilibrium physics
full rationale
The paper derives the analytical model directly from catenary curve equations under uniform drag and the numerical model from discretized force equilibrium solved via CasADi/IPOPT. Both rest on first-principles statics without parameter fitting that is later renamed as prediction, without self-citation chains that bear the central claim, and without ansatz smuggling. Validation against independent load-cell data keeps the chain externally falsifiable. No load-bearing step reduces to its own inputs by construction.
Axiom & Free-Parameter Ledger
free parameters (1)
- uniform drag parameter
axioms (2)
- domain assumption The tether can be modeled as a catenary under combined gravity and uniform aerodynamic drag
- domain assumption Quasi-static equilibrium holds for the tether in the target scenarios
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leandAlembert_cosh_solution_aczel echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
analytical method based on catenary theory with a uniform drag assumption... y = a*cosh((x-x0)/a) + y0
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Tethered Unmanned Aerial Vehicles—A Systematic Review,
M. N. Marques, S. A. Magalh ˜aes, F. N. Dos Santos, and H. S. Mendonc ¸a, “Tethered Unmanned Aerial Vehicles—A Systematic Review,”Robotics, vol. 12, no. 4, p. 117, Aug. 2023. [Online]. Available: https://www.mdpi.com/2218-6581/12/4/117
work page 2023
-
[2]
Cable Optimization and Drag Estimation for Tether-Powered Multirotor UA Vs,
M. Beffert and A. Zell, “Cable Optimization and Drag Estimation for Tether-Powered Multirotor UA Vs,” in2025 International Conference on Unmanned Aircraft Systems (ICUAS), May 2025, pp. 15–21, iSSN: 2575-7296. [Online]. Available: https://ieeexplore.ieee.org/document/ 11007916
work page 2025
-
[3]
H. M. Irvine,Cable Structures. Dover Publications, 1992
work page 1992
-
[4]
Airborne Wind Energy: Airfoil-Airmass Interaction,
M. Zanon, S. Gros, J. Meyers, and M. Diehl, “Airborne Wind Energy: Airfoil-Airmass Interaction,”IF AC Proceedings V olumes, vol. 47, no. 3, pp. 5814–5819, Jan. 2014. [Online]. Available: https: //www.sciencedirect.com/science/article/pii/S1474667016425218
work page 2014
-
[5]
Analytical Tether Model for Static Kite Flight,
N. Bigi, A. N ˆeme, K. Roncin, J.-B. Leroux, G. Bles, C. Jochum, and Y . Parlier, “Analytical Tether Model for Static Kite Flight,” inAirborne Wind Energy, R. Schmehl, Ed. Singapore: Springer Singapore, 2018, pp. 57–78, series Title: Green Energy and Technology. [Online]. Available: http://link.springer.com/10.1007/978-981-10-1947-0 3
-
[6]
J. Koenemann, P. Williams, S. Sieberling, and M. Diehl, “Modeling of an airborne wind energy system with a flexible tether model for the optimization of landing trajectories,”IF AC-PapersOnLine, vol. 50, no. 1, pp. 11 944–11 950, Jul. 2017. [Online]. Available: https: //www.sciencedirect.com/science/article/pii/S2405896317315227
work page 2017
-
[7]
Modelling and simulation of a tethered UAS,
E. Dicembrini, M. Scanavino, F. Dabbene, and G. Guglieri, “Modelling and simulation of a tethered UAS,” in2020 International Conference on Unmanned Aircraft Systems (ICUAS). Athens, Greece: IEEE, Sep. 2020, pp. 1801–1808. [Online]. Available: https://ieeexplore.ieee.org/document/9214006/
-
[8]
Tether- Based Localization for Cooperative Ground and Aerial Vehicles,
A. Borgese, D. C. Guastella, G. Sutera, and G. Muscato, “Tether- Based Localization for Cooperative Ground and Aerial Vehicles,” IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 8162–8169, Jul. 2022. [Online]. Available: https://ieeexplore.ieee.org/abstract/ document/9811264
-
[9]
Umbilical deployment modeling for tethered UA V detecting oil pollution from ship,
F. Muttin, “Umbilical deployment modeling for tethered UA V detecting oil pollution from ship,”Applied Ocean Research, vol. 33, no. 4, pp. 332–343, Oct. 2011. [Online]. Available: https://linkinghub.elsevier.com/retrieve/pii/S0141118711000526
work page 2011
-
[10]
Tethered Drones: A Comprehensive Review of Technologies, Challenges, and Applications,
F. Fattori and S. Cocuzza, “Tethered Drones: A Comprehensive Review of Technologies, Challenges, and Applications,”Drones, vol. 9, no. 6, p. 425, Jun. 2025, publisher: Multidisciplinary Digital Publishing Institute. [Online]. Available: https://www.mdpi.com/2504- 446X/9/6/425
work page 2025
-
[11]
Tethered Power for a Series of Quadcopters: Analysis and Applications
“Tethered Power for a Series of Quadcopters: Analysis and Applications.” [Online]. Available: https://ar5iv.labs.arxiv.org/html/ 2203.08180
-
[12]
CasADi: A Symbolic Package for Automatic Differentiation andOptimal Control,
J. Andersson, J. ˚Akesson, and M. Diehl, “CasADi: A Symbolic Package for Automatic Differentiation andOptimal Control,” inRe- cent Advances in Algorithmic Differentiation, S. Forth, P. Hovland, E. Phipps, J. Utke, and A. Walther, Eds. Berlin, Heidelberg: Springer, 2012, pp. 297–307
work page 2012
-
[13]
A. W ¨achter and L. T. Biegler, “On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming,”Mathematical Programming, vol. 106, no. 1, pp. 25– 57, Mar. 2006. [Online]. Available: https://doi.org/10.1007/s10107- 004-0559-y
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.