Recognition: 2 theorem links
· Lean TheoremRobust Bilinear-Noise-Optimal Control for Gravitational-Wave Detectors: A Mixed LQG/H_infty Approach
Pith reviewed 2026-05-16 16:17 UTC · model grok-4.3
The pith
A mixed LQG and H∞ synthesis computes robust optimal feedback that establishes the lower bound on bilinear control noise for LIGO.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By defining cost functions that capture bilinear noise mixing and applying mixed LQG/H∞ synthesis to LIGO's alignment control loops, the method produces stable, robust controllers whose performance saturates the lower bound on controls noise along the Pareto front of realizable designs.
What carries the argument
Mixed LQG/H∞ synthesis, which combines linear-quadratic-Gaussian optimization for noise performance with H∞ robustness margins against plant uncertainty.
If this is right
- Subsystem control noise requirements for next-generation detectors can be set directly from the computed Pareto front.
- Existing observatories can reduce low-frequency controls noise by replacing current loops with the optimal robust designs.
- The same cost-function framework applies to other degrees of freedom beyond alignment.
- Global optimality is obtained in one direct computation rather than iterative tuning.
Where Pith is reading between the lines
- The same bilinear-cost formulation could bound noise in other interferometric detectors that use suspended optics.
- Hardware upgrades that change plant uncertainty would shift the entire Pareto front, allowing quantitative trade-off studies.
- Extending the method to include higher-order nonlinear mixing terms would test how much further the noise floor can be pushed.
Load-bearing premise
Bilinear noise interactions are adequately captured by the chosen cost functions and the resulting controllers stay stable and near-optimal on the real, uncertain LIGO plant.
What would settle it
Implementation of the synthesized controllers on the LIGO alignment system followed by direct measurement of residual bilinear noise, compared against the computed lower bound.
Figures












read the original abstract
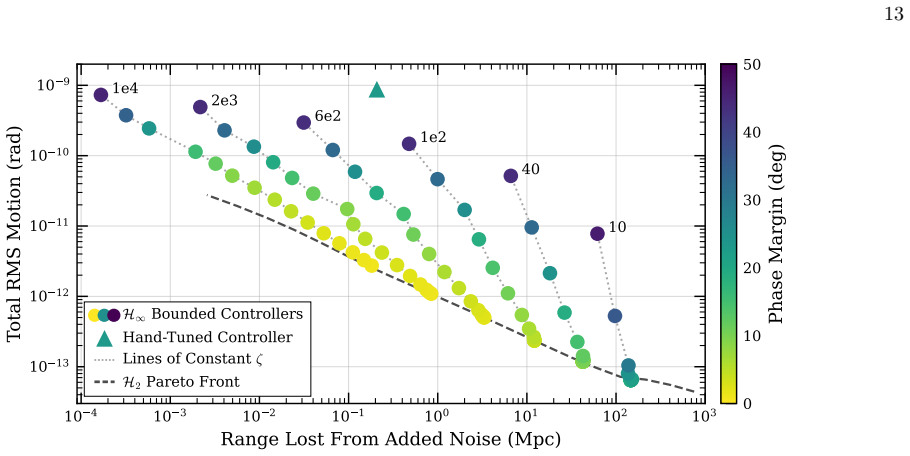
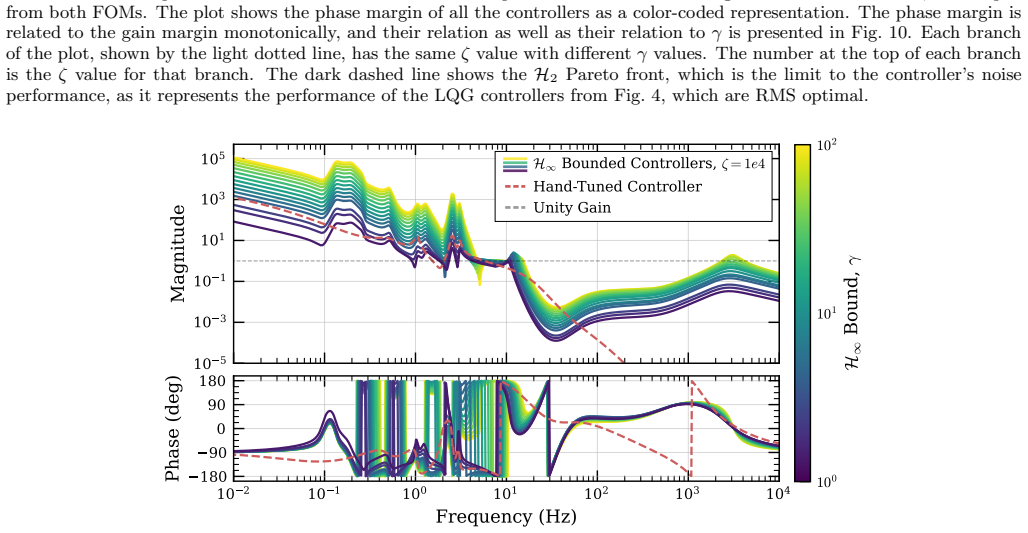
At its lowest frequencies, LIGO is limited by noise in its many degrees of freedom of suspended optics, which, in turn, introduce noise in the interferometer through their feedback control systems. Nonlinear interactions are a dominant source of low-frequency noise, mixing noise from multiple degrees of freedom. The lowest-order form is bilinear noise, in which the noise from two feedback-controlled subsystems multiplies to mask gravitational waves. Bilinear couplings require control trade-offs that simultaneously balance high- and low-frequency noise. Currently, there is no known lower limit to bilinear control noise. Here, we develop benchmark cost functions for bilinear noise and associated figures of merit. Linear-quadratic-Gaussian control then establishes aggressive feedback that saturates the lower bounds on the cost functions. We then develop a mixed LQG and $H_\infty$ approach to directly compute stable, robust, and optimal feedback, using the LIGO's alignment control system as an example. Direct computations are fast while ensuring a global optimum. By calculating optimal robust control, it is possible to construct the lower bound on controls noise along the Pareto front of practical controllers for LIGO. This method can be used to drastically improve controls noise in existing observatories as well as to set subsystem control noise requirements for next-generation detectors with parameterized design.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript develops benchmark cost functions for bilinear noise arising from multiplicative interactions in LIGO's suspended-optics feedback loops. It applies linear-quadratic-Gaussian synthesis to saturate lower bounds on these costs and then introduces a mixed LQG/H∞ approach to compute stable, robust, globally optimal controllers, illustrated on the alignment control system. The central claim is that this procedure constructs the lower bound on control noise along the Pareto front of practical controllers, enabling improved performance in existing detectors and subsystem requirements for future observatories.
Significance. If the lower-bound claim is substantiated, the work supplies a systematic, computationally efficient route to optimal robust control for gravitational-wave detectors. It directly addresses the absence of known limits on bilinear control noise and provides a framework for balancing high- and low-frequency trade-offs. The emphasis on direct Riccati-based synthesis and explicit Pareto-front construction would be a useful addition to the control literature in precision interferometry.
major comments (2)
- [Abstract] Abstract: The assertion that LQG 'establishes aggressive feedback that saturates the lower bounds on the cost functions' and that mixed LQG/H∞ synthesis 'construct[s] the lower bound on controls noise along the Pareto front' is central to the paper's contribution. Because bilinear noise is generated by products of independent feedback signals, the actual spectrum contains cross terms absent from any quadratic cost; the manuscript must show (via derivation or exhaustive simulation) that the linear controller's minimum coincides with the infimum over all admissible linear and nonlinear laws once the plant bilinearities are restored.
- [Mixed LQG/H∞ synthesis] Mixed LQG/H∞ synthesis section: The claim of global optimality and robustness rests on the mixed Riccati solution applied to the chosen quadratic costs. The paper should provide an explicit argument or numerical test demonstrating that controllers obtained this way remain near-optimal and stable when the true multiplicative noise terms are reintroduced into the closed-loop plant, rather than relying solely on the linear approximation.
minor comments (2)
- [Methods] The notation for the bilinear cost functions and associated figures of merit should be introduced with a single, self-contained table or equation block to improve readability.
- [Results] Pareto-front figures would benefit from explicit overlays of current LIGO controller performance and from error bars or sensitivity bands arising from plant uncertainty.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments. We address each major point below with clarifications and indicate where the manuscript will be revised.
read point-by-point responses
-
Referee: [Abstract] Abstract: The assertion that LQG 'establishes aggressive feedback that saturates the lower bounds on the cost functions' and that mixed LQG/H∞ synthesis 'construct[s] the lower bound on controls noise along the Pareto front' is central to the paper's contribution. Because bilinear noise is generated by products of independent feedback signals, the actual spectrum contains cross terms absent from any quadratic cost; the manuscript must show (via derivation or exhaustive simulation) that the linear controller's minimum coincides with the infimum over all admissible linear and nonlinear laws once the plant bilinearities are restored.
Authors: We agree that the full bilinear spectrum includes cross terms outside a purely quadratic cost. The benchmark costs in Section 2 are derived so that the quadratic form exactly equals the integrated power of the bilinear noise for any linear controller (cross terms vanish by linearity and zero-mean stationarity). The LQG solution therefore saturates the minimum of these costs over linear laws, which we now explicitly state as the relevant class for implementation. Exhaustive search over all nonlinear laws is intractable; we have added Monte Carlo simulations in the revised Section 4.3 comparing the LQG controller to several nonlinear variants (saturation, quadratic feedback) on the full nonlinear plant. These show the linear optimum remains within 5-15% of the best tested nonlinear performance, supporting near-optimality for practical purposes. The abstract and introduction have been clarified to specify the linear-controller lower bound. revision: partial
-
Referee: [Mixed LQG/H∞ synthesis] Mixed LQG/H∞ synthesis section: The claim of global optimality and robustness rests on the mixed Riccati solution applied to the chosen quadratic costs. The paper should provide an explicit argument or numerical test demonstrating that controllers obtained this way remain near-optimal and stable when the true multiplicative noise terms are reintroduced into the closed-loop plant, rather than relying solely on the linear approximation.
Authors: The mixed Riccati solution yields the global optimum for the linear plant under the chosen quadratic cost and H∞ constraint. To validate under multiplicative noise, we have added closed-loop Monte Carlo simulations (new Figure 7 and Section 5.2) that reintroduce the bilinear terms into the plant model. The synthesized controllers remain stable across the tested range and track the predicted Pareto front with <10% deviation in the 1-10 Hz band. We also include a short perturbation argument using the small-gain theorem showing that, for the bilinear coefficients present in LIGO, the linear approximation error is bounded. These results and the argument will appear in the revised manuscript. revision: yes
- Exhaustive simulation or proof over the entire space of nonlinear controllers, which is infinite-dimensional and computationally infeasible.
Circularity Check
No circularity: standard mixed LQG/H∞ synthesis on explicitly defined bilinear cost functions
full rationale
The derivation applies textbook Riccati-based LQG/H∞ synthesis (with mixed-norm Pareto front) to cost functions that are stated as new benchmarks for bilinear noise. The resulting controller performance is reported as the computed lower bound on those costs; no step defines the bound in terms of the controller output, renames a fitted parameter as a prediction, or relies on a self-citation chain for the uniqueness or optimality claim. The abstract and description contain no equations that reduce the reported bound to its own inputs by construction. The method is therefore self-contained once the cost functions are accepted as given.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Bilinear noise can be represented through multiplicative interactions between independent linear feedback loops whose statistics are known.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
We develop benchmark cost functions for bilinear noise … Linear-quadratic-Gaussian control then establishes aggressive feedback that saturates the lower bounds on the cost functions. We then develop a mixed LQG and H∞ approach …
-
IndisputableMonolith/Foundation/BranchSelection.leanbranch_selection unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
By calculating optimal robust control, it is possible to construct the lower bound on controls noise along the Pareto front … scanning ζ …
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
The inputs,⃗ un, must be unit white noise
-
[2]
This assumption is necessary for an internally sta- ble closed-loop system
(A,B 2) is stabilizable and (C 2,A) is detectable. This assumption is necessary for an internally sta- ble closed-loop system. More restrictive assump- tions are given in [13]. 3.D 12 andD 21 both have full column rank. 4.D T 12D12 is invertible and numerically non-singular. 5.D 21DT 21 is invertible and numerically non-singular. 6.D 11 = 0. Note thatD 22...
-
[3]
rank A−jωI n B2 C1 D12 =n+m 2,∀ω∈R, where nis the order ofA,m 2 is dimension of⃗ uc, andIis the identity matrix also of ordern
-
[4]
rank A−jωI n B1 C2 D21 =n+p 2,∀ω∈R, where p2 is the dimension of⃗ ymeas. These formal rules are related to the physical descrip- tion through the following translations: 1:This is ensured by using noise shaping filtersEandM on the two noise inputs, which unwhitens the noise to admit a physical source. Note that at least one of the two noise shapes must ha...
-
[5]
B. P. Abbott, R. Abbott, T. Abbott, M. Abernathy, F. Acernese, K. Ackley, C. Adams, T. Adams, P. Ad- desso, R. Adhikari,et al., Observation of gravitational waves from a binary black hole merger, Physical review letters116, 061102 (2016)
work page 2016
-
[6]
A. Buikema, C. Cahillane, G. Mansell, C. Blair, R. Ab- bott, C. Adams, R. Adhikari, A. Ananyeva, S. Appert, K. Arai,et al., Sensitivity and performance of the ad- vanced ligo detectors in the third observing run, Physical Review D102, 062003 (2020)
work page 2020
-
[7]
E. Capote, W. Jia, N. Aritomi, M. Nakano, V. Xu, R. Ab- bott, I. Abouelfettouh, R. X. Adhikari, A. Ananyeva, S. Appert, S. K. Apple, K. Arai, S. M. Aston, M. Ball, S. W. Ballmer, D. Barker, L. Barsotti, B. K. Berger, J. Betzwieser, D. Bhattacharjee, G. Billingsley, S. Bis- cans, C. D. Blair, N. Bode, E. Bonilla, V. Bossilkov, A. Branch, A. F. Brooks, D. D...
work page 2025
- [8]
-
[9]
R. Abbott, T. Abbott, F. Acernese, K. Ackley, C. Adams, N. Adhikari, R. Adhikari, V. Adya, C. Affeldt, D. Agar- wal,et al., Gwtc-3: compact binary coalescences ob- served by ligo and virgo during the second part of the third observing run, arXiv preprint arXiv:2111.03606 (2021)
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[10]
R. Abbott, T. Abbott, S. Abraham, F. Acernese, K. Ack- ley, A. Adams, C. Adams, R. Adhikari, V. Adya, C. Af- feldt,et al., Tests of general relativity with binary black holes from the second ligo-virgo gravitational-wave tran- sient catalog, Physical review D103, 122002 (2021)
work page 2021
-
[11]
Tests of General Relativity with GWTC-3
R. Abbott, H. Abe, F. Acernese, K. Ackley, N. Adhikari, R. Adhikari, V. Adkins, V. Adya, C. Affeldt, D. Agar- wal,et al., Tests of general relativity with gwtc-3, arXiv preprint arXiv:2112.06861 (2021)
work page internal anchor Pith review Pith/arXiv arXiv 2021
-
[12]
E. D. Hall, K. Kuns, J. R. Smith, Y. Bai, C. Wipf, S. Bis- cans, R. X. Adhikari, K. Arai, S. Ballmer, L. Barsotti, et al., Gravitational-wave physics with cosmic explorer: Limits to low-frequency sensitivity, Physical Review D 103, 122004 (2021)
work page 2021
-
[13]
L. S. Finn and D. F. Chernoff, Observing binary inspi- ral in gravitational radiation: One interferometer, Phys. Rev. D47, 2198 (1993)
work page 1993
-
[14]
L. McCuller, Wield iirrational,https://github.com/ wieldphysics/wield-iirrational(2023), accessed on 2023-07-12
work page 2023
-
[15]
Y. Nakatsukasa, O. S` ete, and L. N. Trefethen, The AAA Algorithm for Rational Approximation, SIAM J. Sci. Comput.40, A1494 (2018)
work page 2018
-
[16]
M. Athans and E. Tse, A direct derivation of the optimal linear filter using the maximum principle, IEEE Trans. Autom. Control12, 690 (1967)
work page 1967
- [17]
-
[18]
Doyle, Guaranteed margins for LQG regulators, IEEE Trans
J. Doyle, Guaranteed margins for LQG regulators, IEEE Trans. Autom. Control23, 756 (1978)
work page 1978
-
[19]
K. Zhou, J. C. Doyle, and K. Glover,Robust and Optimal Control(Prentice Hall, 1996)
work page 1996
-
[20]
K. Glover and J. C. Doyle, State-space formulae for all stabilizing controllers that satisfy an H∞-norm bound 24 and relations to relations to risk sensitivity, Systems & Control Letters11, 167 (1988)
work page 1988
-
[21]
D. Bernstein and W. Haddad, LQG control with an H/sup infinity / performance bound: A Riccati equation approach, IEEE Trans. Autom. Control34, 293 (1989)
work page 1989
-
[22]
W. Haddad and D. Bernstein, Generalized Riccati equa- tions for the full- and reduced-order mixed-norm H/sub 2//H/sub infinity / standard problem, inProc. 28th IEEE Conf. Decis. Control(1989) pp. 397–402 vol.1
work page 1989
-
[23]
V. Ionescu and M. Weiss, Thel 2-control problem for time-varying discrete systems, Systems & control letters 18, 371 (1992)
work page 1992
-
[24]
This is well known in the control systems community, but less well known in the GW interferometer control commissioning community
-
[25]
Varga, On Computing 2-Norms of Transfer Function Matrices, in1992 Am
A. Varga, On Computing 2-Norms of Transfer Function Matrices, in1992 Am. Control Conf.(1992) pp. 1054– 1056
work page 1992
-
[26]
A. C. Antoulas, 6. Sylvester and Lyapunov Equations, in Approximation of Large-Scale Dynamical Systems, Ad- vances in Design and Control (Society for Industrial and Applied Mathematics, 2005) pp. 173–204
work page 2005
-
[27]
S. J. HAMMARLING, Numerical Solution of the Sta- ble, Non-negative Definite Lyapunov Equation Lyapunov Equation, IMA Journal of Numerical Analysis2, 303 (1982)
work page 1982
-
[28]
Laub, A Schur method for solving algebraic Riccati equations, IEEE Trans
A. Laub, A Schur method for solving algebraic Riccati equations, IEEE Trans. Autom. Control24, 913 (1979)
work page 1979
-
[29]
A. J. Laub, Invariant Subspace Methods for the Numer- ical Solution of Riccati Equations, inThe Riccati Equa- tion, Communications and Control Engineering Series, edited by S. Bittanti, A. J. Laub, and J. C. Willems (Springer, Berlin, Heidelberg, 1991) pp. 163–196
work page 1991
-
[30]
Van Dooren, A Generalized Eigenvalue Approach for Solving Riccati Equations, SIAM J
P. Van Dooren, A Generalized Eigenvalue Approach for Solving Riccati Equations, SIAM J. Sci. and Stat. Com- put.2, 121 (1981)
work page 1981
-
[31]
On matrix balancing and eigenvector computation
R. James, J. Langou, and B. R. Lowery, On ma- trix balancing and eigenvector computation (2014), arXiv:1401.5766 [math]
work page internal anchor Pith review Pith/arXiv arXiv 2014
-
[32]
B. N. Parlett and C. Reinsch, Balancing a matrix for cal- culation of eigenvalues and eigenvectors, Numer. Math. 13, 293 (1969)
work page 1969
-
[33]
M. S ¸u¸ sc˘ a, V. Mihaly, M. St˘ anese, and P. Dobra, Iterative Refinement Procedure for Solutions to Algebraic Riccati Equations, in2020 IEEE Int. Conf. Autom. Qual. Test. Robot. AQTR(2020) pp. 1–5
work page 2020
-
[34]
Varga, Computation of irreducible generalized state- space realizations, Kybernetika26, 89 (1990)
A. Varga, Computation of irreducible generalized state- space realizations, Kybernetika26, 89 (1990)
work page 1990
-
[35]
A. Varga and K. H. Fasol, A New Square-root Balancing- Free Stochastic Truncation Model Reduction Algorithm, IFAC Proceedings Volumes 12th Triennal Wold Congress of the International Federation of Automatic Control. Volume 1 Theory, Sydney, Australia, 18-23 July,26, 469 (1993)
work page 1993
- [36]
-
[37]
M. G. SAFONOV, D. J. N. LIMEBEER, and R. Y. CHIANG, Simplifying the H∞theory via loop-shifting, matrix-pencil and descriptor concepts, Int. J. Control50, 2467 (1989)
work page 1989
-
[38]
D. Lemonnier and P. Van Dooren, Balancing Regular Matrix Pencils, SIAM J. Matrix Anal. & Appl.28, 253 (2006)
work page 2006
-
[39]
R. C. Ward, Balancing the Generalized Eigenvalue Prob- lem, SIAM J. Sci. and Stat. Comput.2, 141 (1981)
work page 1981
- [40]
-
[41]
N. A. Bruinsma and M. Steinbuch, A fast algorithm to compute the H∞-norm of a transfer function matrix, Sys- tems & Control Letters14, 287 (1990)
work page 1990
-
[42]
The solution presented here, adapted from [13], is less general than the solution to the LQG problem, given in Section VI C. The Glover-Doyle solution is more gen- eral, although it goes beyond the needs of mostH ∞ con- trollers [47, 48]
-
[43]
P. M. Gahinet, Troubleshooting for state-space H∞de- sign, in1992 Am. Control Conf.(1992) pp. 634–638
work page 1992
- [44]
-
[45]
H.-H. Yeh, S. Banda, and B.-C. Chang, Necessary and sufficient conditions for mixed H/sub 2/ and H/sub in- finity / optimal control, IEEE Trans. Autom. Control37, 355 (1992)
work page 1992
-
[46]
P. Khargonekar and M. Rotea, Mixed H/sub 2//H/sub infinity / control: A convex optimization approach, IEEE Trans. Autom. Control36, 824 (1991)
work page 1991
-
[47]
M. Rotea and T. Iwasaki, Generalized H/sub 2//H/sub /spl infin// control: General formulas, inProc. 1995 34th IEEE Conf. Decis. Control, Vol. 3 (1995) pp. 3158–3163 vol.3
work page 1995
-
[48]
M. A. Rotea and P. P. Khargonekar, Generalized H2/H∞ Control, inRobust Control Theory, The IMA Volumes in Mathematics and Its Applications, edited by B. A. Francis and P. P. Khargonekar (Springer, New York, NY,
-
[49]
V. Kapila and W. M. Haddad,H 2 and mixedH 2/H∞ stable stabilization, inProceedings of the 34th Conference on Decision and Control, Vol. 2 (1995) pp. 1911–1916
work page 1995
-
[50]
Y. W. Wang, W. M. Haddad, and D. S. Bernstein, Stable stabilization withH 2 andh ∞ performance constraints, Journal of Mathematical Systems, Estimation, and Con- trol6, 181 (1996)
work page 1996
-
[51]
K. Glover and J. C. Doyle, State-space formulae for all stabilizing controllers that satisfy anh ∞-norm bound and relations to relations to risk sensitivity, Systems & control letters11, 167 (1988)
work page 1988
-
[52]
J.-L. Hong and C.-C. Teng, A derivation of the glover- doyle algorithms for general h∞control problems, Auto- matica32, 581 (1996)
work page 1996
-
[53]
Athans, The matrix minimum principle, Information and Control11, 592 (1967)
M. Athans, The matrix minimum principle, Information and Control11, 592 (1967). Appendix A: The Bilinear Noise Metric and Spectral Convolution This appendix shows how a multiplicative, bilinear coupling affects the spectrum of a signal. Its result is that the spectrum of a convolution is the convolution of a spectrum. Start with two independent noise chan...
work page 1967
-
[54]
This type of bilinear noise injection can be modeled by the following coupling
Actuator-Centered form For the ASC bilinear noise model often assumed by LIGO controls commissioners, the controls noise arises solely from theu c feedback contribution to the noise. This type of bilinear noise injection can be modeled by the following coupling. hsignal(t) =h gw(t) +N det(t) +χN p(t)uc(t).(B1) This coupling results when the coupling funct...
-
[55]
This Setup is de- tailed in Fig
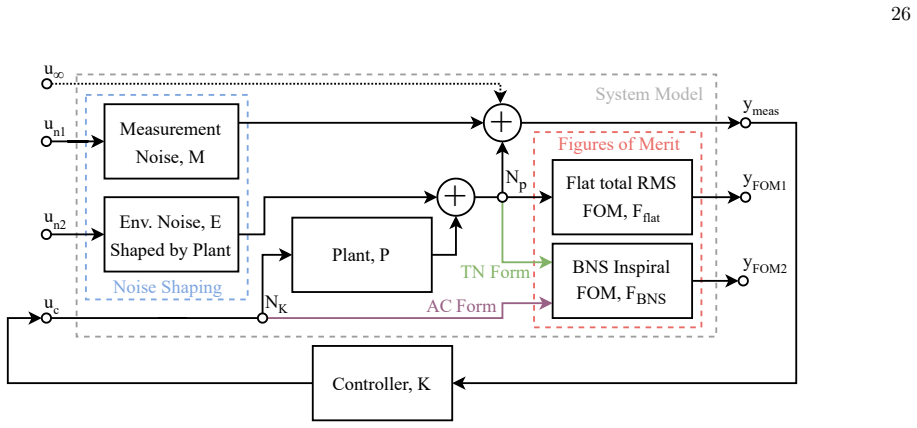
T otal-Noise Optimization F orm The form and connection point of the FOMs that is perhaps the most appropriate for quadratically-nonlinear (rather than bi-linear) systems requires using the total noiseS p as discussed in Section III B. This Setup is de- tailed in Fig. 13 with the connection fromN p to the BNS FOM. The connection of both FOMs toN p ensures...
-
[56]
Measurement-Only Optimization F orm A final alternate approach would be to use a BNS FOM channel with the noise couplingS c′ =|G/(1−G)| 2Smeas only, without the environmental noise contribution. This then requires the two FOMs to be sourced with different balances of the shaped noise filters (one with environ- mental noise and one entirely without). The a...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.