Recognition: 2 theorem links
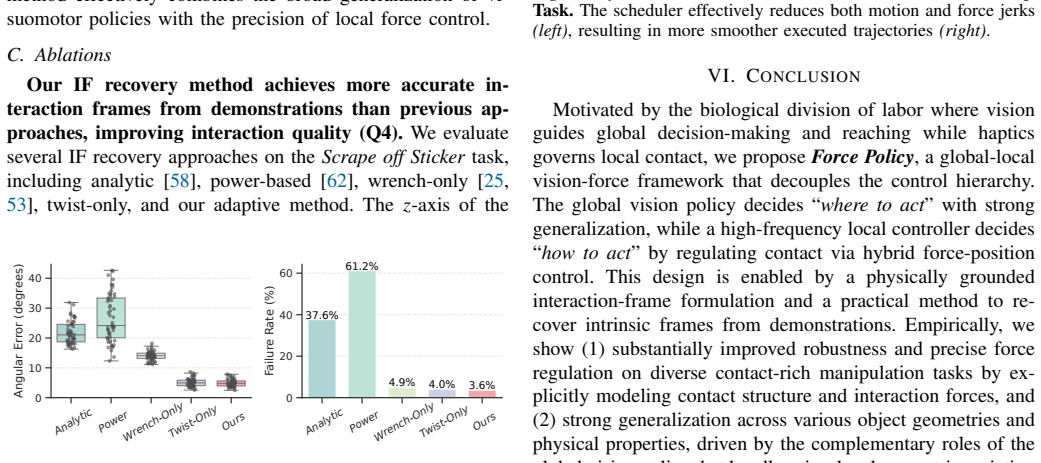
· Lean TheoremForce Policy: Learning Hybrid Force-Position Control Policy under Interaction Frame for Contact-Rich Manipulation
Pith reviewed 2026-05-15 19:33 UTC · model grok-4.3
The pith
Recovering an interaction frame from demonstrations lets a global vision policy hand off to a local high-frequency hybrid force-position controller for stable contact.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We formalize a physically grounded interaction frame as an instantaneous local basis recovered from demonstrations that decouples force regulation from motion execution. Using this, Force Policy combines a global vision-based policy for free-space actions with a high-frequency local policy that estimates the frame on contact and executes hybrid force-position control, yielding more robust contact establishment, accurate force regulation, and generalization to novel objects across diverse contact-rich tasks.
What carries the argument
The interaction frame: an instantaneous local basis recovered from demonstrations that decouples force regulation from motion execution and enables the switch to hybrid force-position control.
If this is right
- The method produces more robust contact establishment than monolithic or parameter-only baselines across real-world tasks.
- Force regulation becomes more accurate because the local policy operates directly in the recovered frame.
- Generalization to objects with new geometries and physical properties holds without retraining the full policy.
- Both contact stability and overall task execution quality improve as a direct result of the global-local split.
Where Pith is reading between the lines
- The frame recovery step could be extended to online refinement using current force measurements if initial demo-based estimates drift.
- Similar global-local splits might apply to other hybrid control domains such as tool use where vision sets approach and force refines insertion.
- If frame estimation proves reliable, the need for expensive high-precision force-torque sensors at every joint might decrease for many contact tasks.
Load-bearing premise
The interaction frame recovered from demonstrations remains accurate enough and the high-frequency local policy stabilizes contact without explicit dynamics models or extra sensing.
What would settle it
A trial in which the local policy fails to maintain stable contact forces when the recovered frame orientation deviates more than 15 degrees from the true surface normal on a novel object geometry would falsify the claim.
Figures
















read the original abstract
Contact-rich manipulation demands human-like integration of perception and force feedback: vision should guide task progress, while high-frequency interaction control must stabilize contact under uncertainty. Existing learning-based policies often entangle these roles in a monolithic network, trading off global generalization against stable local refinement, while control-centric approaches typically assume a known task structure or learn only controller parameters rather than the structure itself. In this paper, we formalize a physically grounded interaction frame, an instantaneous local basis that decouples force regulation from motion execution, and propose a method to recover it from demonstrations. Based on this, we address both issues by proposing Force Policy, a global-local vision-force policy in which a global policy guides free-space actions using vision, and upon contact, a high-frequency local policy with force feedback estimates the interaction frame and executes hybrid force-position control for stable interaction. Real-world experiments across diverse contact-rich tasks show consistent gains over strong baselines, with more robust contact establishment, more accurate force regulation, and reliable generalization to novel objects with varied geometries and physical properties, ultimately improving both contact stability and execution quality. Project page: https://force-policy.github.io/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces Force Policy, a global-local vision-force policy for contact-rich manipulation. It formalizes a physically grounded interaction frame recovered from demonstrations to decouple force regulation from motion execution. A global policy uses vision for free-space actions, while a high-frequency local policy employs force feedback for hybrid force-position control upon contact. Real-world experiments on diverse tasks demonstrate consistent improvements over baselines in contact establishment, force regulation, and generalization to novel objects with different geometries and properties.
Significance. If the results hold, this work could significantly advance learning-based approaches to hybrid control in robotics by providing a structured way to integrate perception and force feedback without requiring explicit dynamics models or additional sensing. The real-world validation across multiple tasks and generalization claims are notable strengths, though the absence of detailed quantitative metrics, baselines, and ablations in the abstract makes it difficult to fully assess the magnitude of the contribution.
major comments (1)
- [Abstract] Abstract: The central claim of reliable generalization to novel objects with varied geometries and physical properties depends on the interaction frame recovered from demonstrations remaining valid under unmodeled contact variations (e.g., friction, compliance). No derivation or ablation is provided showing how frame estimation tolerates these variations, which is load-bearing for the assertion that the local policy stabilizes contact without explicit dynamics modeling.
minor comments (1)
- [Abstract] Abstract: Claims of 'consistent gains over strong baselines' and 'more robust contact establishment' are stated without any quantitative metrics, specific baseline comparisons, or ablation results, which weakens the ability to evaluate the strength of evidence.
Simulated Author's Rebuttal
We thank the referee for their constructive comments. We address the concern regarding the interaction frame's robustness to unmodeled variations below and commit to strengthening the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim of reliable generalization to novel objects with varied geometries and physical properties depends on the interaction frame recovered from demonstrations remaining valid under unmodeled contact variations (e.g., friction, compliance). No derivation or ablation is provided showing how frame estimation tolerates these variations, which is load-bearing for the assertion that the local policy stabilizes contact without explicit dynamics modeling.
Authors: We appreciate the referee highlighting this load-bearing aspect of our claims. The interaction frame is recovered directly from force-torque measurements in the demonstrations by computing the principal axes of the observed force and velocity vectors at contact; this procedure is physically grounded in the fact that contact forces align with the surface normal while tangential components reflect motion along the surface. Because the recovery uses real sensor data rather than a pre-specified model, it adapts to the instantaneous geometry and force distribution, providing inherent tolerance to moderate variations in friction and compliance. Our real-world results across objects with differing shapes, stiffnesses, and surface properties support this empirically. To address the absence of explicit analysis, we will add to the revised manuscript: (i) a short derivation showing that bounded perturbations in friction produce bounded errors in the recovered tangent directions that are corrected by the high-frequency force feedback loop, and (ii) a new ablation that injects controlled variations in friction coefficient and object compliance (both in simulation and on hardware) and reports frame estimation error together with downstream force-regulation and task-success metrics. These additions will quantify the claimed robustness. revision: yes
Circularity Check
No circularity detected; derivation relies on external demonstrations and hardware validation
full rationale
The paper formalizes an interaction frame recovered from demonstrations and deploys a global-local policy evaluated on physical hardware across novel objects. No equations or steps reduce by construction to fitted inputs, self-citations, or renamed ansatzes; the interaction frame is treated as an externally recovered quantity rather than defined in terms of the policy output. Central claims rest on empirical gains over baselines, not on internal reparameterization of the same data.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption An instantaneous local interaction frame exists and can be recovered from force demonstrations to decouple force regulation from motion execution.
invented entities (1)
-
Interaction frame
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We formalize a physically grounded interaction frame, an instantaneous local basis that decouples force regulation from motion execution... spectral decomposition of K_env into principal stiffnesses λ_i and axes q_i, partitioning into constraint subspace U and admissible-motion subspace T
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leanJ_uniquely_calibrated_via_higher_derivative unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
recover IF directly from observed interaction signals ξ and W... adaptive approximation strategy... dominant power source (dissipative residual or structural residual)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Learning Diffusion Policies from Demonstrations for Compliant Contact-Rich Manipulation
Malek Aburub et al. “Learning Diffusion Policies from Demonstrations for Compliant Contact-Rich Manipulation”. In:arXiv preprint arXiv:2410.19235(2024)
-
[2]
SAIL: Faster-than- Demonstration Execution of Imitation Learning Policies
Nadun Ranawaka Arachchige et al. “SAIL: Faster-than- Demonstration Execution of Imitation Learning Policies”. In:Conference on Robot Learning. V ol. 305. PMLR, 2025, pp. 721–749
work page 2025
-
[3]
On the Analysis of Move- ment Smoothness
Sivakumar Balasubramanian et al. “On the Analysis of Move- ment Smoothness”. In:Journal of Neuroengineering and Re- habilitation12.1 (2015), p. 112
work page 2015
-
[4]
Cambridge university press, 1998
Robert Stawell Ball.A Treatise on the Theory of Screws. Cambridge university press, 1998
work page 1998
-
[5]
Artem Bazhenov et al. “Echo: An Open-Source, Low-Cost Teleoperation System with Force Feedback for Dataset Collec- tion in Robot Learning”. In:arXiv preprint arXiv:2504.07939 (2025)
-
[6]
GR00T N1: An Open Foundation Model for Generalist Humanoid Robots
Johan Bjorck et al. “GR00T N1: An Open Foundation Model for Generalist Humanoid Robots”. In:arXiv preprint arXiv:2503.14734(2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[7]
Real- Time Execution of Action Chunking Flow Policies
Kevin Black, Manuel Y Galliker, and Sergey Levine. “Real- Time Execution of Action Chunking Flow Policies”. In:Ad- vances in Neural Information Processing Systems. 2025
work page 2025
-
[8]
𝜋 0.5: a Vision-Language-Action Model with Open-World Generalization
Kevin Black et al. “𝜋 0.5: a Vision-Language-Action Model with Open-World Generalization”. In:Conference on Robot Learning. V ol. 305. PMLR, 2025, pp. 17–40
work page 2025
-
[9]
𝜋 0: A Vision-Language-Action Flow Model for General Robot Control
Kevin Black et al. “𝜋 0: A Vision-Language-Action Flow Model for General Robot Control”. In:Robotics: Science and Systems. 2025
work page 2025
-
[10]
Kevin Black et al. “Training-Time Action Conditioning for Efficient Real-Time Chunking”. In:arXiv preprint arXiv:2512.05964(2025)
-
[11]
RT-1: Robotics Transformer for Real- World Control at Scale
Anthony Brohan et al. “RT-1: Robotics Transformer for Real- World Control at Scale”. In:Robotics: Science and Systems. 2023
work page 2023
-
[12]
Specification of Force-Controlled Actions in the
Herman Bruyninckx and Joris De Schutter. “Specification of Force-Controlled Actions in the "Task Frame Formalism" - a Synthesis”. In:IEEE Transactions on Robotics and Automation 12.4 (1996), pp. 581–589
work page 1996
-
[13]
Kinematic Models for Model- Based Compliant Motion in the Presence of Uncertainty
Herman Bruyninckx et al. “Kinematic Models for Model- Based Compliant Motion in the Presence of Uncertainty”. In:International Journal of Robotics Research14.5 (1995), pp. 465–482
work page 1995
-
[14]
Bi-ACT: Bilateral Control-Based Imitation Learning via Action Chunking with Transformer
Thanpimon Buamanee et al. “Bi-ACT: Bilateral Control-Based Imitation Learning via Action Chunking with Transformer”. In:IEEE International Conference on Advanced Intelligent Mechatronics. IEEE. 2024, pp. 410–415
work page 2024
-
[15]
Learning Variable Impedance Control
Jonas Buchli et al. “Learning Variable Impedance Control”. In:International Journal of Robotics Research30.7 (2011), pp. 820–833
work page 2011
-
[16]
Integration of Haptics and Vision in Human Multisensory Grasping
Ivan Camponogara and Robert V olcic. “Integration of Haptics and Vision in Human Multisensory Grasping”. In:Cortex135 (2021), pp. 173–185
work page 2021
-
[17]
Vegetable Peeling: A Case Study in Constrained Dexterous Manipulation
Tao Chen et al. “Vegetable Peeling: A Case Study in Constrained Dexterous Manipulation”. In:arXiv preprint arXiv:2407.07884(2024)
-
[18]
Diffusion Policy: Visuomotor Policy Learn- ing via Action Diffusion
Cheng Chi et al. “Diffusion Policy: Visuomotor Policy Learn- ing via Action Diffusion”. In:Robotics: Science and Systems. 2023
work page 2023
-
[19]
Universal Manipulation Interface: In- The-Wild Robot Teaching Without In-The-Wild Robots
Cheng Chi et al. “Universal Manipulation Interface: In- The-Wild Robot Teaching Without In-The-Wild Robots”. In: Robotics: Science and Systems. 2024
work page 2024
-
[20]
The Parallel Ap- proach to Force/Position Control of Robotic Manipulators
Stefano Chiaverini and Lorenzo Sciavicco. “The Parallel Ap- proach to Force/Position Control of Robotic Manipulators”. In: IEEE Transactions on Robotics and Automation9.4 (2002), pp. 361–373
work page 2002
-
[21]
Learning Phrase Representations using RNN Encoder-Decoder for Statistical Machine Translation
Kyunghyun Cho et al. “Learning Phrase Representations using RNN Encoder-Decoder for Statistical Machine Translation”. In:Empirical Methods in Natural Language Processing. ACL, 2014, pp. 1724–1734
work page 2014
-
[22]
In-the-wild compliant manipulation with umi-ft.arXiv preprint arXiv:2601.09988, 2026
Hojung Choi et al. “In-the-Wild Compliant Manipulation with UMI-FT”. In:arXiv preprint arXiv:2601.09988(2026)
-
[23]
Sim-to-Real Transfer in Robotics: Addressing the Gap Between Simulation and Real-World Performance
Naomi Chukwurah, Abiodun Sunday Adebayo, and Olanre- waju Oluwaseun Ajayi. “Sim-to-Real Transfer in Robotics: Addressing the Gap Between Simulation and Real-World Performance”. In:International Journal of Robotics and Sim- ulation6.1 (2024), pp. 89–102
work page 2024
-
[24]
Open X- Embodiment: Robotic Learning Datasets and RT-X Models
Open X-Embodiment Collaboration et al. “Open X- Embodiment: Robotic Learning Datasets and RT-X Models”. In:IEEE International Conference on Robotics and Automa- tion. 2024, pp. 6892–6903
work page 2024
-
[25]
Learning Task Con- straints from Demonstration for Hybrid Force/Position Con- trol
Adam Conkey and Tucker Hermans. “Learning Task Con- straints from Demonstration for Hybrid Force/Position Con- trol”. In:IEEE-RAS International Conference on Humanoid Robots. IEEE. 2019, pp. 162–169
work page 2019
-
[26]
Compliant Robot Motion I. A Formalism for Specifying Compliant Motion Tasks
Joris De Schutter and Hendrik Van Brussel. “Compliant Robot Motion I. A Formalism for Specifying Compliant Motion Tasks”. In:International Journal of Robotics Research7.4 (1988), pp. 3–17
work page 1988
- [27]
-
[28]
RH20T: A Comprehensive Robotic Dataset for Learning Diverse Skills in One-Shot
Hao-Shu Fang et al. “RH20T: A Comprehensive Robotic Dataset for Learning Diverse Skills in One-Shot”. In:IEEE International Conference on Robotics and Automation. 2024, pp. 653–660
work page 2024
-
[29]
DEXOP: A Device for Robotic Trans- fer of Dexterous Human Manipulation
Hao-Shu Fang et al. “DEXOP: A Device for Robotic Trans- fer of Dexterous Human Manipulation”. In:arXiv preprint arXiv:2509.04441(2025)
-
[30]
AirExo: Low-Cost Exoskeletons for Learning Whole-Arm Manipulation in the Wild
Hongjie Fang et al. “AirExo: Low-Cost Exoskeletons for Learning Whole-Arm Manipulation in the Wild”. In:IEEE International Conference on Robotics and Automation. IEEE. 2024, pp. 15031–15038
work page 2024
-
[31]
AirExo-2: Scaling up Generalizable Robotic Imitation Learning with Low-Cost Exoskeletons
Hongjie Fang et al. “AirExo-2: Scaling up Generalizable Robotic Imitation Learning with Low-Cost Exoskeletons”. In:Conference on Robot Learning. V ol. 305. PMLR, 2025, pp. 198–220
work page 2025
-
[32]
Play to the Score: Stage-Guided Dy- namic Multi-Sensory Fusion for Robotic Manipulation
Ruoxuan Feng et al. “Play to the Score: Stage-Guided Dy- namic Multi-Sensory Fusion for Robotic Manipulation”. In: Conference on Robot Learning. 2024
work page 2024
-
[33]
Omar A Gharbawie, Iwona Stepniewska, and Jon H Kaas. “Cortical Connections of Functional Zones in Posterior Pari- etal Cortex and Frontal Cortex Motor Regions in New World Monkeys”. In:Cerebral Cortex21.9 (2011), pp. 1981–2002
work page 2011
-
[34]
Adam B Goldring et al. “Functional Characterization of the Fronto-Parietal Reaching and Grasping Network: Reversible Deactivation of M1 and Areas 2, 5, and 7b in Awake Behav- ing Monkeys”. In:Journal of Neurophysiology127.5 (2022), pp. 1363–1387
work page 2022
-
[35]
Deep Residual Learning for Image Recog- nition
Kaiming He et al. “Deep Residual Learning for Image Recog- nition”. In:IEEE Conference on Computer Vision and Pattern Recognition. 2016, pp. 770–778
work page 2016
-
[36]
FoAR: Force-Aware Reactive Policy for Contact-Rich Robotic Manipulation
Zihao He et al. “FoAR: Force-Aware Reactive Policy for Contact-Rich Robotic Manipulation”. In:IEEE Robotics and Automation Letters(2025)
work page 2025
-
[37]
Impedance Control: An Approach to Manip- ulation
Neville Hogan. “Impedance Control: An Approach to Manip- ulation”. In:Journal of Dynamic Systems, Measurement, and Control107 (1985), pp. 1–24
work page 1985
-
[38]
Adaptive Compliance Policy: Learning Approximate Compliance for Diffusion Guided Control
Yifan Hou et al. “Adaptive Compliance Policy: Learning Approximate Compliance for Diffusion Guided Control”. In: IEEE International Conference on Robotics and Automation. 2025, pp. 4829–4836
work page 2025
-
[39]
Binghao Huang et al. “3D-ViTac: Learning Fine-Grained Manipulation with Visuo-Tactile Sensing”. In:arXiv preprint arXiv:2410.24091(2024)
-
[40]
Abderrahmane Issam et al. “DTW-Align: Bridging the Modal- ity Gap in End-to-End Speech Translation with Dynamic Time Warping Alignment”. In:Proceedings of the Tenth Conference on Machine Translation. 2025, pp. 191–199
work page 2025
-
[41]
Adaptive mixtures of local experts
Robert A Jacobs et al. “Adaptive mixtures of local experts”. In:Neural computation3.1 (1991), pp. 79–87
work page 1991
-
[42]
A Survey of Automated Threaded Fastening
Zhenzhong Jia et al. “A Survey of Automated Threaded Fastening”. In:IEEE Transactions on Automation Science and Engineering16.1 (2018), pp. 298–310
work page 2018
-
[43]
Learning Force Control Poli- cies for Compliant Manipulation
Mrinal Kalakrishnan et al. “Learning Force Control Poli- cies for Compliant Manipulation”. In:IEEE/RSJ International Conference on Intelligent Robots and Systems. 2011, pp. 4639– 4644
work page 2011
-
[44]
Tatsuya Kamijo, Cristian C Beltran-Hernandez, and Masashi Hamaya. “Learning Variable Compliance Control from a Few Demonstrations for Bimanual Robot with Haptic Feed- back Teleoperation System”. In:IEEE/RSJ International Con- ference on Intelligent Robots and Systems. IEEE. 2024, pp. 12663–12670
work page 2024
-
[45]
Admittance control for physical human–robot inter- action
Arvid QL Keemink, Herman Van der Kooij, and Arno HA Stienen. “Admittance control for physical human–robot inter- action”. In:The International Journal of Robotics Research 37.11 (2018), pp. 1421–1444
work page 2018
-
[46]
Oussama Khatib. “A Unified Approach for Motion and Force Control of Robot Manipulators: The Operational Space For- mulation”. In:IEEE Journal on Robotics and Automation3.1 (2003), pp. 43–53
work page 2003
-
[47]
Learning Movement Primitives for Force Interaction Tasks
Jens Kober, Michael Gienger, and Jochen J Steil. “Learning Movement Primitives for Force Interaction Tasks”. In:IEEE International Conference on Robotics and Automation. IEEE. 2015, pp. 3192–3199
work page 2015
-
[48]
Stability Considerations for Variable Impedance Control
Klas Kronander and Aude Billard. “Stability Considerations for Variable Impedance Control”. In:IEEE Transactions on Robotics32.5 (2016), pp. 1298–1305
work page 2016
-
[49]
Learn- ing Contact-Rich Manipulation Skills With Guided Policy Search
Sergey Levine, Nolan Wagener, and Pieter Abbeel. “Learn- ing Contact-Rich Manipulation Skills With Guided Policy Search”. In:IEEE International Conference on Robotics and Automation. 2015, pp. 156–163
work page 2015
-
[50]
See, Hear, and Feel: Smart Sensory Fusion for Robotic Manipulation
Hao Li et al. “See, Hear, and Feel: Smart Sensory Fusion for Robotic Manipulation”. In:Conference on Robot Learning. 2022, pp. 1368–1378
work page 2022
-
[51]
Xing Li, Manuel Baum, and Oliver Brock. “Augmentation Enables One-Shot Generalization in Learning from Demon- stration for Contact-Rich Manipulation”. In:IEEE/RSJ Inter- national Conference on Intelligent Robots and Systems. IEEE. 2023, pp. 3656–3663
work page 2023
-
[52]
Learning from Demonstration Based on Environmental Constraints
Xing Li and Oliver Brock. “Learning from Demonstration Based on Environmental Constraints”. In:IEEE Robotics and Automation Letters7.4 (2022), pp. 10938–10945
work page 2022
-
[53]
Wenhai Liu et al. “ForceMimic: Force-Centric Imitation Learning With Force-Motion Capture System for Contact-Rich Manipulation”. In:ICRA. IEEE. 2025, pp. 1105–1112
work page 2025
-
[54]
ImMimic: Cross-Domain Imitation from Human Videos via Mapping and Interpolation
Yangcen Liu et al. “ImMimic: Cross-Domain Imitation from Human Videos via Mapping and Interpolation”. In:arXiv preprint arXiv:2509.10952(2025)
-
[55]
ManiW A V: Learning Robot Manipulation from In-the-Wild Audio-Visual Data
Zeyi Liu et al. “ManiW A V: Learning Robot Manipulation from In-the-Wild Audio-Visual Data”. In:Conference on Robot Learning. 2024
work page 2024
-
[56]
Flexiv Ltd.Flexiv Teleoperation Development Kit (TDK). Accessed January 2026
work page 2026
-
[57]
Compliance and Force Control for Com- puter Controlled Manipulators
Matthew T Mason. “Compliance and Force Control for Com- puter Controlled Manipulators”. In:IEEE Transactions on Systems, Man, and Cybernetics11.6 (2007), pp. 418–432
work page 2007
-
[58]
Ali Mousavi Mohammadi et al. “A Generic Task Model and Control Strategy to Support Learning, Robust Control, and Generalization of Contact-Rich Manipulation Tasks”. In: Robotics and Autonomous Systems197 (2026), p. 105270
work page 2026
-
[59]
Meinard Müller. “Dynamic Time Warping”. In:Information Retrieval for Music and Motion. Springer, 2007, pp. 69–84
work page 2007
-
[60]
Performance Trade- offs in Dynamic Time Warping Algorithms for Isolated Word Recognition
C. Myers, L. Rabiner, and A. Rosenberg. “Performance Trade- offs in Dynamic Time Warping Algorithms for Isolated Word Recognition”. In:IEEE Transactions on Acoustics, Speech, and Signal Processing28.6 (1980), pp. 623–635
work page 1980
-
[61]
FORGE: Force-Guided Explo- ration for Robust Contact-Rich Manipulation Under Uncer- tainty
Michael Noseworthy et al. “FORGE: Force-Guided Explo- ration for Robust Contact-Rich Manipulation Under Uncer- tainty”. In:IEEE Robotics and Automation Letters(2025)
work page 2025
-
[62]
Alex Harm Gert-Jan Overbeek et al. “Identifying Physical In- teractions in Contact-Based Robot Manipulation for Learning from Demonstration”. In:Advanced Robotics Research(2025), e202500109
work page 2025
-
[63]
Chaoyi Pan et al. “Much Ado About Noising: Dispelling the Myths of Generative Robotic Control”. In:arXiv preprint arXiv:2512.01809(2025)
-
[64]
FiLM: Visual Reasoning with a General Conditioning Layer
Ethan Perez et al. “FiLM: Visual Reasoning with a General Conditioning Layer”. In:AAAI conference on Artificial Intel- ligence. 2018, pp. 3942–3951
work page 2018
-
[65]
Claudia Pérez-D’Arpino and Julie A Shah. “C-Learn: Learn- ing Geometric Constraints from Demonstrations for Multi- Step Manipulation in Shared Autonomy”. In:IEEE Interna- tional Conference on Robotics and Automation. IEEE. 2017, pp. 4058–4065
work page 2017
-
[66]
Hybrid Position/Force Control of Manipulators
Marc H Raibert and John J Craig. “Hybrid Position/Force Control of Manipulators”. In:Journal of dynamic systems, measurement, and control103.2 (1981), pp. 126–133
work page 1981
-
[67]
Branden Romero et al. “Eyesight Hand: Design of a Fully- Actuated Dexterous Robot Hand with Integrated Vision-based Tactile Sensors and Compliant Actuation”. In:arXiv preprint arXiv:2408.06265(2024)
-
[68]
Dynamic Programming Algorithm Optimization for Spoken Word Recognition
H. Sakoe and S. Chiba. “Dynamic Programming Algorithm Optimization for Spoken Word Recognition”. In:IEEE Trans- actions on Acoustics, Speech, and Signal Processing26.1 (1978), pp. 43–49
work page 1978
-
[69]
Sergei Satsevich et al. “Prometheus: Universal, Open-Source Mocap-Based Teleoperation System with Force Feedback for Dataset Collection in Robot Learning”. In:arXiv preprint arXiv:2510.01023(2025)
-
[70]
Joohwan Seo et al. “EquiContact: A Hierarchical SE(3) Vision-To-Force Equivariant Policy for Spatially Generalizable Contact-Rich Tasks”. In:arXiv preprint arXiv:2507.10961 (2025)
-
[71]
Adaptive Admittance Control: An Ap- proach to Explicit Force Control in Compliant Motion
Homayoun Seraji. “Adaptive Admittance Control: An Ap- proach to Explicit Force Control in Compliant Motion”. In: IEEE International Conference on Robotics and Automation. IEEE. 1994, pp. 2705–2712
work page 1994
-
[72]
In- ferring Geometric Constraints in Human Demonstrations
Guru Subramani, Michael Zinn, and Michael Gleicher. “In- ferring Geometric Constraints in Human Demonstrations”. In: Conference on Robot Learning. PMLR. 2018, pp. 223–236
work page 2018
-
[73]
Imitation Learning-Based Framework for Learning 6-D Lin- ear Compliant Motions
Markku Suomalainen, Fares J Abu-Dakka, and Ville Kyrki. “Imitation Learning-Based Framework for Learning 6-D Lin- ear Compliant Motions”. In:Autonomous Robots45.3 (2021), pp. 389–405
work page 2021
-
[74]
A Survey of Robot Manipulation in Contact
Markku Suomalainen, Yiannis Karayiannidis, and Ville Kyrki. “A Survey of Robot Manipulation in Contact”. In:Robotics and Autonomous Systems156 (2022), p. 104224
work page 2022
-
[75]
Learning Compliant Assembly Motions from Demonstration
Markku Suomalainen and Ville Kyrki. “Learning Compliant Assembly Motions from Demonstration”. In:IEEE/RSJ Inter- national Conference on Intelligent Robots and Systems. IEEE. 2016, pp. 871–876
work page 2016
-
[76]
A Geometric Ap- proach for Learning Compliant Motions from Demonstra- tion
Markku Suomalainen and Ville Kyrki. “A Geometric Ap- proach for Learning Compliant Motions from Demonstra- tion”. In:IEEE-RAS International Conference on Humanoid Robotics. IEEE. 2017, pp. 783–790
work page 2017
-
[77]
Learning from Demonstration for Hydraulic Manipulators
Markku Suomalainen et al. “Learning from Demonstration for Hydraulic Manipulators”. In:IEEE/RSJ International Confer- ence on Intelligent Robots and Systems. IEEE. 2018, pp. 3579– 3586
work page 2018
-
[78]
Partially Decoupled Impedance Motion Force Control Using Prioritized Inertia Shaping
Wenbo Tang, Weiming Wang, and Shiquan Wang. “Partially Decoupled Impedance Motion Force Control Using Prioritized Inertia Shaping”. In:IEEE Robotics and Automation Letters (2024)
work page 2024
-
[79]
Task Parameterization Us- ing Continuous Constraints Extracted from Human Demon- strations
Ana Lucia Pais Ureche et al. “Task Parameterization Us- ing Continuous Constraints Extracted from Human Demon- strations”. In:IEEE Transactions on Robotics31.6 (2015), pp. 1458–1471
work page 2015
-
[80]
Neural Control of Motion-to-Force Transitions With the Fin- gertip
Madhusudhan Venkadesan and Francisco J Valero-Cuevas. “Neural Control of Motion-to-Force Transitions With the Fin- gertip”. In:Journal of Neuroscience28.6 (2008), pp. 1366– 1373
work page 2008
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.