ECoLAD: Deployment-Oriented Evaluation for Automotive Time-Series Anomaly Detection
Pith reviewed 2026-05-15 12:29 UTC · model grok-4.3
The pith
Lightweight classical detectors maintain both coverage and detection performance across all throughput targets on constrained automotive telemetry, while several deep methods lose feasibility first.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
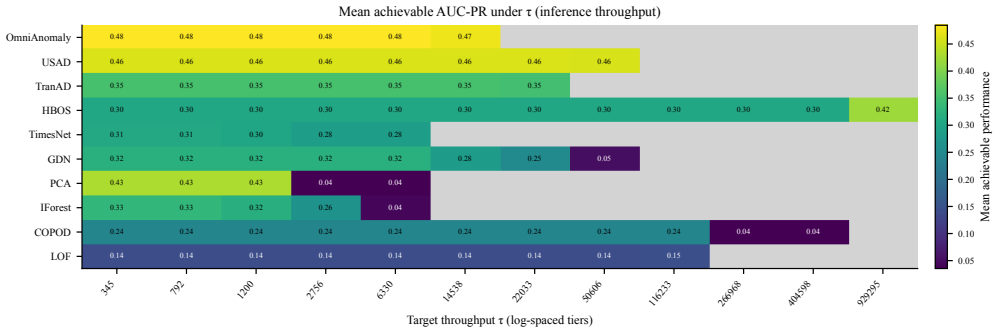
On constrained automotive telemetry, lightweight classical detectors sustain both coverage and detection lift above the random baseline across the full throughput sweep. Several deep methods lose feasibility before they lose accuracy.
What carries the argument
The monotone compute-reduction ladder with mechanically determined integer-only scaling rules and explicit CPU thread caps, which reduces resources step by step while logging every change and reports coverage plus best AUC-PR under target scoring rates.
Load-bearing premise
The compute-reduction ladder with its integer scaling rules and thread caps accurately models the resource limits and runtime behavior of real in-vehicle monitoring systems.
What would settle it
Executing the same detectors on actual vehicle hardware and finding that a deep method meets a target throughput rate with maintained AUC-PR where the ladder predicted infeasibility.
Figures


read the original abstract
Time-series anomaly detectors are commonly compared on workstation-class hardware under unconstrained execution. In-vehicle monitoring, however, requires predictable latency and stable behavior under limited CPU parallelism. Accuracy-only leaderboards can therefore misrepresent which methods remain feasible under deployment-relevant constraints. We present ECoLAD (Efficiency Compute Ladder for Anomaly Detection), a deployment-oriented evaluation protocol instantiated as an empirical study on proprietary automotive telemetry (anomaly rate ${\approx}$0.022) and complementary public benchmarks. ECoLAD applies a monotone compute-reduction ladder across heterogeneous detector families using mechanically determined, integer-only scaling rules and explicit CPU thread caps, while logging every applied configuration change. Throughput-constrained behavior is characterized by sweeping target scoring rates and reporting (i) coverage (the fraction of entities meeting the target) and (ii) the best AUC-PR achievable among measured ladder configurations satisfying the target. On constrained automotive telemetry, lightweight classical detectors sustain both coverage and detection lift above the random baseline across the full throughput sweep. Several deep methods lose feasibility before they lose accuracy.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents ECoLAD, a deployment-oriented evaluation protocol for time-series anomaly detection. It applies a monotone compute-reduction ladder using mechanically determined integer-only scaling rules and explicit CPU thread caps to heterogeneous detector families, evaluating coverage (fraction of entities meeting target scoring rates) and best achievable AUC-PR on proprietary automotive telemetry (anomaly rate ≈0.022) plus public benchmarks. The central claim is that lightweight classical detectors sustain both coverage and detection lift above the random baseline across the full throughput sweep, while several deep methods lose feasibility before they lose accuracy.
Significance. If the results hold under the stated constraints, the work is significant for shifting anomaly detection evaluation from unconstrained workstation benchmarks toward deployment-relevant metrics such as predictable latency and coverage under limited CPU parallelism. This is particularly relevant for in-vehicle monitoring systems. The protocol's emphasis on logging every configuration change and reporting both coverage and constrained AUC-PR provides a concrete, falsifiable framework that could improve method selection for embedded automotive applications. The combination of proprietary and public data is a strength, though the former limits external reproducibility.
major comments (2)
- [ECoLAD protocol (abstract and methods)] The central claim depends on the ECoLAD ladder's monotone integer-only scaling rules and CPU thread caps accurately proxying real in-vehicle constraints. However, the protocol description does not address potential non-monotone effects from cache contention, memory bandwidth limits, or interrupt-driven I/O, which could make reported coverage fractions and feasibility thresholds artifacts of the artificial ladder rather than true hardware behavior (see skeptic note on the weakest assumption).
- [Results and evaluation protocol] No details are provided on statistical significance testing, error bars, variance across runs, or exact scaling rules for the throughput sweep. This leaves the claim that classical detectors 'sustain both coverage and detection lift across the full throughput sweep' only partially supported, consistent with the reported soundness score of 5.0.
minor comments (2)
- [Abstract] The anomaly rate ≈0.022 should be stated with more precision or as a range to aid interpretation of the low-anomaly regime.
- [Experimental setup] Clarify whether the public benchmarks use the same scaling ladder and thread caps as the proprietary telemetry, or if adaptations were made.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below with targeted revisions to strengthen the protocol description and results reporting.
read point-by-point responses
-
Referee: [ECoLAD protocol (abstract and methods)] The central claim depends on the ECoLAD ladder's monotone integer-only scaling rules and CPU thread caps accurately proxying real in-vehicle constraints. However, the protocol description does not address potential non-monotone effects from cache contention, memory bandwidth limits, or interrupt-driven I/O, which could make reported coverage fractions and feasibility thresholds artifacts of the artificial ladder rather than true hardware behavior (see skeptic note on the weakest assumption).
Authors: We agree that the ECoLAD ladder is a controlled, reproducible proxy rather than a complete emulation of in-vehicle hardware dynamics. The monotone integer-only scaling and explicit thread caps were chosen to isolate throughput effects across detector families in a mechanically auditable way. While effects such as cache contention or interrupt-driven I/O are not modeled, they fall outside the protocol's stated scope of compute-reduction under fixed parallelism. In revision we will expand the methods section with an explicit limitations paragraph discussing these assumptions, including the weakest assumption noted by the referee, and flag them as directions for future hardware-in-the-loop validation. revision: partial
-
Referee: [Results and evaluation protocol] No details are provided on statistical significance testing, error bars, variance across runs, or exact scaling rules for the throughput sweep. This leaves the claim that classical detectors 'sustain both coverage and detection lift across the full throughput sweep' only partially supported, consistent with the reported soundness score of 5.0.
Authors: We accept that the current manuscript omits these details. The experiments used fixed random seeds for reproducibility, but variance, error bars, and formal significance tests were not reported. In the revised version we will (i) provide the exact integer scaling formulas and thread-cap rules in the methods, (ii) add error bars or standard deviations derived from repeated runs for coverage and AUC-PR, and (iii) include a short statistical summary (e.g., confidence intervals or paired tests) supporting the claim that classical detectors maintain lift across the sweep. These additions should raise the evidential support for the central results. revision: yes
Circularity Check
No circularity: empirical metrics from explicit ladder
full rationale
The paper defines ECoLAD as a concrete evaluation protocol that applies a monotone compute-reduction ladder with integer-only scaling rules and thread caps to existing detectors, then directly measures coverage (fraction of entities meeting throughput targets) and best AUC-PR among feasible configurations. All reported results are experimental outcomes on the given telemetry and public benchmarks; no equations, predictions, or first-principles claims reduce to fitted parameters, self-definitions, or self-citation chains. The protocol is self-contained and externally falsifiable via replication on the same data and hardware constraints.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Anomaly detectors can be scaled monotonically by integer factors without changing their fundamental behavior class.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
ECoLAD applies a monotone compute-reduction ladder across heterogeneous detector families using mechanically determined, integer-only scaling rules and explicit CPU thread caps
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Anomaly detection in time series: A comprehensive evaluation,
S. Schmidl, P. Wenig, and T. Papenbrock, “Anomaly detection in time series: A comprehensive evaluation,” vol. 15, no. 9, pp. 1779–1797
-
[2]
Timeeval: A benchmarking toolkit for time series anomaly detection algorithms,
P. Wenig, S. Schmidl, and T. Papenbrock, “Timeeval: A benchmarking toolkit for time series anomaly detection algorithms,” vol. 15, no. 12, pp. 3678–3681
-
[3]
An experimental evaluation of anomaly detection in time series,
A. Zhang, S. Deng, D. Cui, Y . Yuan, and G. Wang, “An experimental evaluation of anomaly detection in time series,”Proc. VLDB Endow., vol. 17, no. 3, p. 483–496, Nov. 2023
work page 2023
-
[4]
Tab: Unified benchmarking of time series anomaly detection methods,
X. Qiu, Z. Li, W. Qiu, S. Hu, L. Zhou, X. Wu, Z. Li, C. Guo, A. Zhou, Z. Sheng, J. Hu, C. S. Jensen, and B. Yang, “Tab: Unified benchmarking of time series anomaly detection methods,” 2025
work page 2025
-
[5]
Timeseriesbench: An industrial-grade benchmark for time series anomaly detection models,
H. Si, J. Li, C. Pei, H. Cui, J. Yang, Y . Sun, S. Zhang, J. Li, H. Zhang, J. Han, D. Pei, and G. Xie, “Timeseriesbench: An industrial-grade benchmark for time series anomaly detection models,” 2024
work page 2024
-
[6]
Evaluating real-time anomaly detection algorithms – the numenta anomaly benchmark,
A. Lavin and S. Ahmad, “Evaluating real-time anomaly detection algorithms – the numenta anomaly benchmark,” in2015 IEEE 14th International Conference on Machine Learning and Applications (ICMLA). IEEE, Dec. 2015, p. 38–44
work page 2015
-
[7]
On the runtime-efficacy trade-off of anomaly detection techniques for real-time streaming data,
D. Choudhary, A. Kejariwal, and F. Orsini, “On the runtime-efficacy trade-off of anomaly detection techniques for real-time streaming data,” 2017
work page 2017
-
[8]
Robust Anomaly Detection for Multivariate Time Series through Stochastic Recurrent Neural Network,
Y . Su, Y . Zhao, C. Niu, R. Liu, W. Sun, and D. Pei, “Robust Anomaly Detection for Multivariate Time Series through Stochastic Recurrent Neural Network,” inProceedings of the 25th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining. Anchorage AK USA: ACM, Jul. 2019, pp. 2828–2837
work page 2019
-
[9]
Detecting spacecraft anomalies using lstms and nonparametric dynamic thresholding,
K. Hundman, V . Constantinou, C. Laporte, I. Colwell, and T. Soder- strom, “Detecting spacecraft anomalies using lstms and nonparametric dynamic thresholding,” inProceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, ser. KDD ’18. ACM, Jul. 2018, p. 387–395
work page 2018
-
[10]
Adam: A Method for Stochastic Optimization
D. P. Kingma and J. Ba, “Adam: A Method for Stochastic Optimization,” Jan. 2017, arXiv:1412.6980
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[11]
PyOD: A Python Toolbox for Scalable Outlier Detection,
Y . Zhao, Z. Nasrullah, and Z. Li, “PyOD: A Python Toolbox for Scalable Outlier Detection,”Journal of Machine Learning Research, vol. 20, no. 96, pp. 1–7, 2019
work page 2019
-
[12]
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, L. Kaiser, and I. Polosukhin, “Attention is all you need,” in Proceedings of the 31st International Conference on Neural Information Processing Systems, 2017, p. 6000–6010
work page 2017
-
[13]
F. T. Liu, K. M. Ting, and Z.-H. Zhou, “Isolation Forest,” in2008 Eighth IEEE International Conference on Data Mining, Dec. 2008, pp. 413–422, iSSN: 2374-8486
work page 2008
-
[14]
LOF: identifying density-based local outliers,
M. M. Breunig, H.-P. Kriegel, R. T. Ng, and J. Sander, “LOF: identifying density-based local outliers,” vol. 29, no. 2, pp. 93–104, 2000
work page 2000
-
[15]
Histogram-based outlier score (hbos): A fast unsupervised anomaly detection algorithm,
M. Goldstein and A. Dengel, “Histogram-based outlier score (hbos): A fast unsupervised anomaly detection algorithm,” 09 2012
work page 2012
-
[16]
COPOD: Copula- based outlier detection
Z. Li, Y . Zhao, N. Botta, C. Ionescu, and X. Hu, “COPOD: Copula- based outlier detection.”
-
[17]
USAD: UnSupervised anomaly detection on multivariate time series,
J. Audibert, P. Michiardi, F. Guyard, S. Marti, and M. A. Zuluaga, “USAD: UnSupervised anomaly detection on multivariate time series,” inProceedings of the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining. ACM, 2020, pp. 3395–3404
work page 2020
-
[18]
TranAD: Deep Transformer Networks for Anomaly Detection in Multivariate Time Series Data,
S. Tuli, G. Casale, and N. R. Jennings, “TranAD: Deep Transformer Networks for Anomaly Detection in Multivariate Time Series Data,” May 2022, arXiv:2201.07284
-
[19]
Graph Neural Network-Based Anomaly Detection in Multivariate Time Series,
A. Deng and B. Hooi, “Graph Neural Network-Based Anomaly Detection in Multivariate Time Series,” Jun. 2021, arXiv:2106.06947
-
[20]
TimesNet: Temporal 2D-Variation Modeling for General Time Series Analysis
H. Wu, T. Hu, Y . Liu, H. Zhou, J. Wang, and M. Long, “TimesNet: Temporal 2D-Variation Modeling for General Time Series Analysis,” Apr. 2023, arXiv:2210.02186
work page internal anchor Pith review arXiv 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.