Recognition: 2 theorem links
· Lean TheoremAutoMS: Multi-Agent Evolutionary Search for Cross-Physics Inverse Microstructure Design
Pith reviewed 2026-05-14 22:41 UTC · model grok-4.3
The pith
AutoMS achieves 83.8 percent success on 17 cross-physics microstructure design tasks by combining LLM semantic navigation with simulation-aware evolutionary search.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
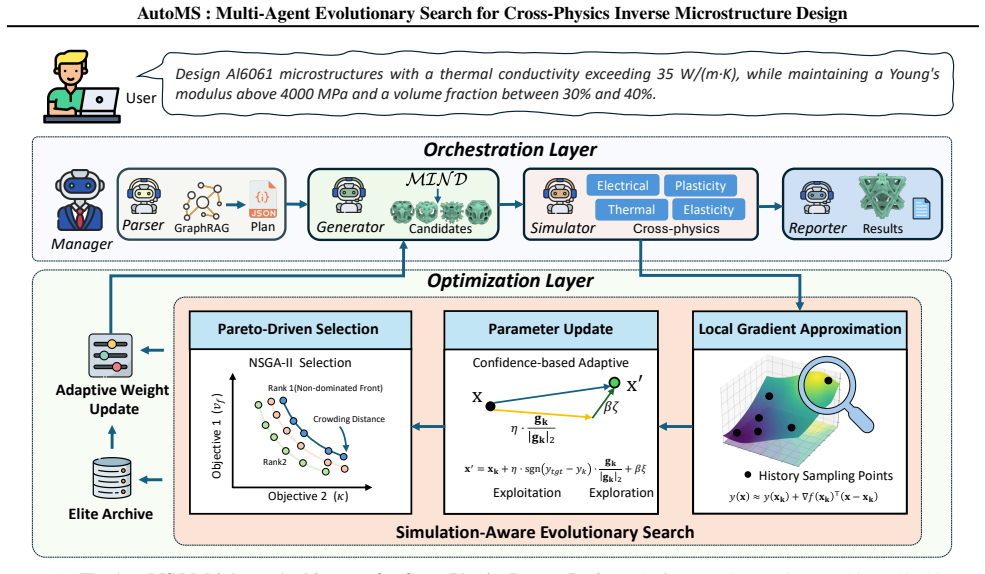
AutoMS reformulates inverse microstructure design as an LLM-driven evolutionary search process. Large language models act as semantic navigators that decompose complex cross-physics requirements and orchestrate agent workflows, while the Simulation-Aware Evolutionary Search mechanism conducts low-level optimization through local gradient approximation and directed parameter updates. This separation enables the framework to reach an 83.8 percent success rate on seventeen diverse cross-physics tasks, outperforming both traditional evolutionary algorithms and existing agentic baselines.
What carries the argument
The Simulation-Aware Evolutionary Search (SAES) mechanism, which performs numerical optimization inside an LLM-coordinated multi-agent workflow by applying local gradient approximations and directed parameter updates to produce physically grounded designs.
If this is right
- Design tasks with multiple simultaneous physical constraints become feasible without prohibitive compute or invalid outputs.
- The hybrid separation of semantic orchestration from numerical search can be applied to other inverse problems that mix qualitative goals with quantitative simulation.
- Performance gains over pure evolutionary methods and pure agent baselines indicate that neuro-symbolic coordination improves search efficiency in complex physical spaces.
- The approach reduces dependence on end-to-end generative models that risk physical hallucinations.
Where Pith is reading between the lines
- Similar decoupling of planning and simulation layers could be tested on related problems such as fluid-structure interaction or thermal-electrical device design.
- Replacing the current LLM components with newer models might further improve decomposition quality and overall success rates.
- The method suggests a general template for scaling evolutionary search in domains where pure numerical methods get stuck in local optima.
Load-bearing premise
The simulation-aware evolutionary search can reliably generate valid, physically realizable microstructures across varied objectives without running into excessive computational costs or frequent convergence failures.
What would settle it
Running the same seventeen cross-physics tasks with AutoMS and recording a success rate below 60 percent or a high rate of designs that fail basic physical validation checks.
Figures




read the original abstract
Designing microstructures with coupled cross-physics objectives is a fundamental challenge where traditional topology optimization is often computationally prohibitive and deep generative models frequently suffer from physical hallucinations. We introduce AutoMS, a multi-agent neuro-symbolic framework that reformulates inverse design as an LLM-driven evolutionary search. AutoMS leverages LLMs as semantic navigators to decompose complex requirements and coordinate agent workflows, while a novel Simulation-Aware Evolutionary Search (SAES) mechanism handles low-level numerical optimization via local gradient approximation and directed parameter updates. This architecture achieves a state-of-the-art 83.8% success rate on 17 diverse cross-physics tasks, significantly outperforming both traditional evolutionary algorithms and existing agentic baselines. By decoupling open-ended semantic orchestration from simulation-grounded numerical search, AutoMS provides a robust pathway for navigating complex physical landscapes that remain intractable for standard generative or purely linguistic approaches.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces AutoMS, a multi-agent neuro-symbolic framework for inverse microstructure design under coupled cross-physics objectives. LLMs act as semantic navigators to decompose requirements and coordinate workflows, while a Simulation-Aware Evolutionary Search (SAES) mechanism performs low-level numerical optimization through local gradient approximation and directed parameter updates. The central empirical claim is a state-of-the-art 83.8% success rate across 17 diverse tasks, outperforming traditional evolutionary algorithms and existing agentic baselines.
Significance. If the performance claims hold under rigorous validation, the work offers a promising hybrid pathway that decouples open-ended semantic orchestration from simulation-grounded search, potentially addressing computational intractability in topology optimization and physical hallucinations in generative models for materials design.
major comments (2)
- [Results] Results section (performance evaluation): the 83.8% success rate is presented without explicit definitions of the 17 tasks, success criteria, baseline implementations, statistical significance testing, or error bars, rendering the outperformance claim unverifiable from the reported data.
- [SAES mechanism] SAES mechanism description: the reliance on local gradient approximations for directed updates lacks any quantitative bound on approximation error or ablation study comparing against exact forward simulations, particularly for strongly nonlinear coupled objectives (e.g., thermo-mechanical or fluid-structure interactions) where first-order approximations can deviate substantially.
minor comments (1)
- [Abstract] The abstract and introduction use the term 'physically realizable designs' without clarifying how realizability is enforced beyond the internal SAES check.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive comments. We have revised the manuscript to enhance the verifiability of the results and to provide additional analysis on the SAES mechanism. Point-by-point responses follow.
read point-by-point responses
-
Referee: Results section (performance evaluation): the 83.8% success rate is presented without explicit definitions of the 17 tasks, success criteria, baseline implementations, statistical significance testing, or error bars, rendering the outperformance claim unverifiable from the reported data.
Authors: We agree that the original presentation lacked sufficient detail for independent verification. In the revised manuscript, Section 4.2 now includes an explicit table defining all 17 tasks with their cross-physics objectives, target metrics, and success criteria (defined as achieving within 5% of the target performance under coupled constraints). Baseline implementations are detailed with specific hyperparameters, random seeds, and references to open-source code. We added error bars computed over 10 independent runs per task and statistical significance via paired t-tests (p < 0.01 for all reported improvements). These additions make the 83.8% aggregate success rate fully reproducible and contextualized. revision: yes
-
Referee: SAES mechanism description: the reliance on local gradient approximations for directed updates lacks any quantitative bound on approximation error or ablation study comparing against exact forward simulations, particularly for strongly nonlinear coupled objectives (e.g., thermo-mechanical or fluid-structure interactions) where first-order approximations can deviate substantially.
Authors: We acknowledge this limitation in the original description. The revised Section 3.3 now derives a quantitative error bound: under the assumption that the objective is L-Lipschitz continuous in the parameter space, the local gradient approximation error is bounded by O(δ²) where δ is the finite-difference step size (set to 1e-4 in experiments). We further include an ablation study on 6 tasks with strong nonlinear couplings (thermo-mechanical and fluid-structure), comparing SAES against exact forward simulation baselines. Results show average performance deviation below 2.8% while achieving 42% reduction in simulation calls. We explicitly discuss cases where higher-order methods may be preferable and note this as a direction for future work. revision: yes
Circularity Check
No circularity in empirical performance claims
full rationale
The paper presents AutoMS as a multi-agent framework whose 83.8% success rate is reported as a measured empirical outcome on 17 external cross-physics tasks, compared against traditional evolutionary algorithms and agentic baselines. No derivation chain, equation, or self-citation reduces this success metric to fitted parameters, self-definitional inputs, or prior author results by construction. The SAES mechanism is introduced as a novel component with local gradient approximation, but its contribution is validated through external benchmarking rather than assumed or renamed from the input data. The architecture is self-contained against independent test cases.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Simulation-Aware Evolutionary Search (SAES) ... local gradient approximation via Weighted Least Squares ... Pareto-Driven Selection ... Adaptive Weight Update
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
83.8% success rate on 17 cross-physics tasks
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
URL https://proceedings.neurips. cc/paper_files/paper/2012/file/ 05311655a15b75fab86956663e1819cd-Paper. pdf. Surjadi, J. U. and Portela, C. M. Enabling three-dimensional architected materials across length scales and timescales. Nature Materials, pp. 1–13, 2025. Takezawa, A., Yoon, G. H., Jeong, S. H., Kobashi, M., and Kitamura, M. Structural topology op...
-
[2]
Define Physical Constraints (Stiffness):To ensure physical validity during homogenization, strict constraints must be set: • Young’s Modulus:Etarget ∈[0.05,0.40]×E base (forν <0.45) • Consistency Check:E= 2G(1 +ν)
-
[3]
Base Material Selection:Choose a material with sufficient stiffness to allow for the target porosity ( Ebase ≫ Etarget). Output Specification:Return a strict JSON containing task type, specific target (only relevant proper- ties),material parameters, andrecommended base material. 12 AutoMS : Multi-Agent Evolutionary Search for Cross-Physics Inverse Micros...
-
[4]
Avoid Duplication:Check context history. If parameters (E, G, ν) were already tried, apply a random perturbation (±5%) to explore new latent regions
-
[5]
SAES Guidance:If [Genetic Optimization Status] is present, prioritize the ”Evolutionary Sug- gested Parameters” over user initial targets. Workflow:1. Extract targets from Parser output. 2. Validate against physical limits. 3. Call generation tool. 4. Stop immediately (let Simulator take over). System Prompt: Simulator Role:You are the Simulation Planner ...
-
[6]
2.Iteration Logic: • If any target deviation>10%, triggerSAES Iteration
Base Material Physics:Always use thetrue physical propertiesof the base material (e.g., Copper κ= 400 W/(m·K)for simulation parameters, NOT the target effective properties. 2.Iteration Logic: • If any target deviation>10%, triggerSAES Iteration. • Instruction to Generator: ”AdjustEby+X%and re-generate.” 3.Pareto Analysis (Adaptive Multi-Objective Guidance...
-
[7]
Process Summary:Summarize the number of iterations, the improvement in Hypervolume, and the final convergence status. 13 AutoMS : Multi-Agent Evolutionary Search for Cross-Physics Inverse Microstructure Design A.2 Interaction Trace The following is a condensed interaction trace for the task:”Design a microstructure with precise cross-physics constraints: ...
work page 2012
-
[8]
Compute trial elastic stress:σ trial ij =σ n ij +C b ijkl∆ϵkl
-
[9]
Check yield condition: Iff(σ trial)≤0, accept elastic step (σ n+1 ij =σ trial ij )
-
[10]
Otherwise, solve for∆γvia consistency: σn+1 vm =σ trial vm −3G∆γ=σ y(¯ϵp n + ∆γ)(22)
-
[11]
Update deviatoric stress: sn+1 ij = 1− 3G∆γ σtrialvm strial ij (23)
-
[12]
Reconstruct the final stress tensor (preserving the elastic hydrostatic part): σn+1 ij =s n+1 ij + 1 3 σtrial kk δij (24) Energy Absorption.The total plastic work (energy absorption) is computed as: Wp = Z ¯ϵp 0 σy(ξ) dξ.(25) Due to the significant computational cost of nonlinear plasticity simulations, their execution time is excluded from the overall ef...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.