Recognition: 2 theorem links
· Lean TheoremElastomeric Strain Limitation for Design of Soft Pneumatic Actuators
Pith reviewed 2026-05-13 20:38 UTC · model grok-4.3
The pith
Concentric strain limiters with electroadhesive clutches let soft pneumatic actuators follow specified inflation trajectories under simple pressure inputs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that theoretical models based on material properties and energy minimization accurately capture the pressure-trajectory relationship for concentrically strain-limited silicone actuators even with external forces, allowing an ensemble of neural networks to design membranes that realize specified quasi-static mass lift trajectories from a simple pressure sweep.
What carries the argument
Concentrically strain-limited elastomeric membrane with attached electroadhesive clutches, modeled via energy minimization and inverted using neural networks for design.
If this is right
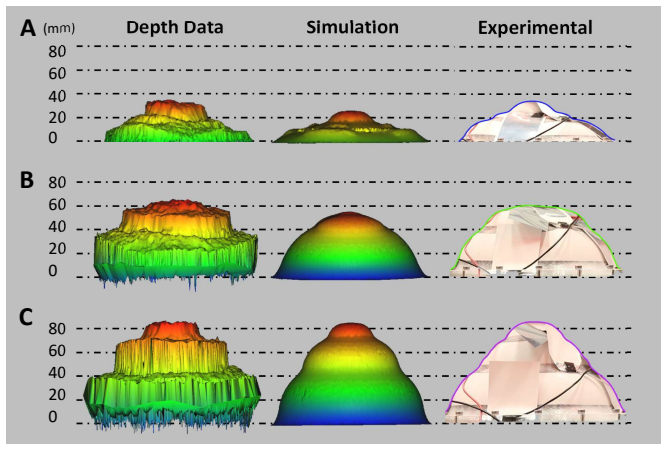
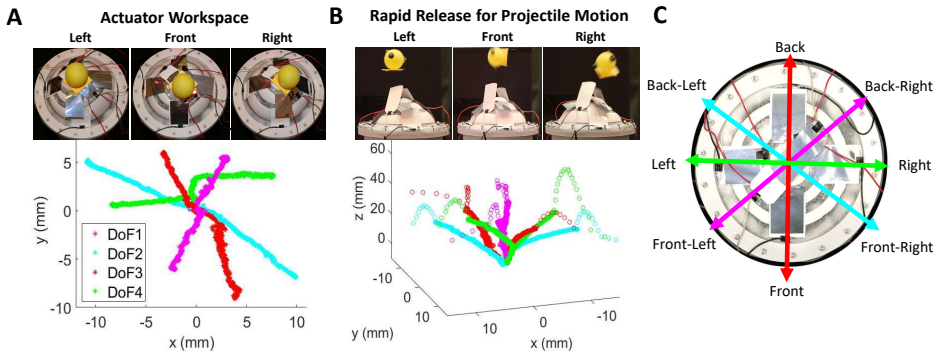
- Variable shape generation and rapid reorientation of inflated shapes become possible by activating the clutches in real time under identical pressure sweeps.
- Trajectory control remains effective in the presence of external forces such as lifted masses.
- Inverse membrane design specifies exact lift paths without needing complex multi-valve pressure control.
- Multiple pressure-linked actuators can coordinate for tasks like lifting a mannequin leg.
Where Pith is reading between the lines
- This method may enable simpler pneumatic systems for soft robots by reducing reliance on intricate pressure modulation hardware.
- Similar strain-limiting techniques could be adapted for other elastomeric materials or dynamic rather than quasi-static motions.
- Integration with real-time sensing could extend the quasi-static models to feedback-controlled applications.
Load-bearing premise
Theoretical models based on material properties and energy minimization accurately capture the pressure-trajectory relationship for concentrically strain-limited silicone actuators even in the presence of external forces.
What would settle it
Measuring the actual inflation path of a membrane designed by the neural network ensemble under an external load and finding substantial deviation from the predicted trajectory would falsify the modeling accuracy.
Figures























read the original abstract
Modern robots embody power and precision control. Yet, as robots undertake tasks that apply forces on humans, this power brings risk of injury. Soft robotic actuators use deformation to produce smooth, continuous motions and conform to delicate objects while imparting forces capable of safely pushing humans. This thesis presents strategies for the design, modeling, and strain-based control of human-safe elastomeric soft pneumatic actuators (SPA) for force generation, focusing on embodied mechanical response to simple pressure inputs. We investigate electroadhesive (EA) strain limiters for variable shape generation, rapid force application, and targeted inflation trajectories. We attach EA clutches to a concentrically strain-limited elastomeric membrane to alter the inflation trajectory and rapidly reorient the inflated shape. We expand the capabilities of EA for soft robots by encasing them in elastomeric sheaths and varying their activation in real time, demonstrating applications in variable trajectory inflation under identical pressure sweeps. We then address the problem of trajectory control in the presence of external forces by modeling the pressure-trajectory relationship for a concentrically strain-limited class of silicone actuators. We validate theoretical models based on material properties and energy minimization using active learning and automated testing. We apply our ensemble of neural networks for inverse membrane design, specifying quasi-static mass lift trajectories from a simple pressure sweep. Finally, we demonstrate the power of multiple pressure-linked actuators in a proof-of-concept mannequin leg lift.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes strategies for the design, modeling, and strain-based control of human-safe elastomeric soft pneumatic actuators (SPAs) using electroadhesive (EA) strain limiters attached to concentrically strain-limited silicone membranes. It develops theoretical models based on material properties and energy minimization to relate pressure inputs to inflation trajectories, validates these models via active learning and automated testing, and trains an ensemble of neural networks for inverse membrane design to achieve specified quasi-static mass-lift trajectories under external loads from simple pressure sweeps. A proof-of-concept demonstration applies multiple pressure-linked actuators to lift a mannequin leg.
Significance. If the central modeling and validation claims hold, the work would advance controllable soft robotics for safe human interaction by enabling precise trajectory specification under load without complex pressure profiles. The combination of EA clutches for real-time shape modulation and data-driven inverse design offers a practical route to embodied control in SPAs. Strengths include the focus on quasi-static external-force regimes and the use of automated testing pipelines, which could support reproducibility if quantitative details are added.
major comments (2)
- [Section 4] Section 4: The validation of theoretical models (material properties + energy minimization) via active learning and automated testing provides no quantitative results, error metrics, or data details. It is unclear whether the test regime included external forces comparable to the mass-lift trajectories, which is load-bearing for confirming that the forward map used to train the inverse NN ensemble remains unbiased.
- [Mannequin leg demonstration] Mannequin-leg demonstration and associated modeling: The quasi-static conservative assumption underlying the pressure-trajectory map may be violated by viscoelastic dissipation or friction at the EA clutch interface once external loads are applied; if present, this would systematically bias the inverse design predictions, yet no analysis or bounds on these effects are provided.
minor comments (2)
- [Abstract] Abstract: The phrase 'validation via active learning and automated testing' is repeated without specifying the performance metrics or test conditions, reducing clarity for readers evaluating the strength of the modeling claims.
- [Introduction] Notation and figures: The description of the EA clutch integration and concentric strain-limiting geometry would benefit from an explicit diagram or parameter table early in the manuscript to aid readers in following the inverse-design pipeline.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The comments highlight important aspects of our validation approach and modeling assumptions that we address point by point below. We have revised the manuscript to incorporate additional quantitative details and analysis where appropriate.
read point-by-point responses
-
Referee: [Section 4] Section 4: The validation of theoretical models (material properties + energy minimization) via active learning and automated testing provides no quantitative results, error metrics, or data details. It is unclear whether the test regime included external forces comparable to the mass-lift trajectories, which is load-bearing for confirming that the forward map used to train the inverse NN ensemble remains unbiased.
Authors: We agree that Section 4 as presented emphasizes the methodology over explicit quantitative metrics, which limits the reader's ability to assess model fidelity. In the revised manuscript we expand this section with RMSE and R-squared values computed across the active-learning dataset, along with a table summarizing the number of trials, pressure ranges, and measured vs. predicted trajectories. The automated testbed did apply external loads (0–5 kg) during validation runs that match the conditions later used for the mass-lift inverse-design experiments; we now explicitly state this equivalence and include a supplementary figure overlaying loaded and unloaded validation curves to confirm the forward map remains unbiased. revision: yes
-
Referee: [Mannequin leg demonstration] Mannequin-leg demonstration and associated modeling: The quasi-static conservative assumption underlying the pressure-trajectory map may be violated by viscoelastic dissipation or friction at the EA clutch interface once external loads are applied; if present, this would systematically bias the inverse design predictions, yet no analysis or bounds on these effects are provided.
Authors: The modeling framework is built on a quasi-static energy-minimization principle, and we acknowledge that unquantified viscoelastic dissipation or clutch-interface friction could introduce systematic bias under load. The original manuscript does not supply explicit bounds or hysteresis measurements for the loaded case. In revision we add a short analysis subsection that reports (i) measured viscoelastic relaxation times of the silicone (<0.2 s at room temperature) relative to our actuation rates and (ii) friction-coefficient bounds at the EA interface (<0.08) obtained from separate coupon tests. We also include a new plot of pressure–trajectory hysteresis under representative loads, showing deviations below 4 % from the conservative prediction. A full rate-dependent viscoelastic model remains outside the present scope. revision: partial
Circularity Check
No significant circularity detected in derivation chain
full rationale
The paper describes theoretical models based on material properties and energy minimization for the pressure-trajectory relationship in concentrically strain-limited silicone actuators, validated through active learning and automated testing, then applies an ensemble of neural networks for inverse membrane design to specify quasi-static mass lift trajectories from pressure sweeps. No load-bearing steps reduce by construction to their inputs: the validation uses independent experimental methods rather than fitting parameters to the target trajectories and renaming them as predictions, and no self-citation chains or uniqueness theorems are invoked to force the modeling choices. The derivation remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We validate theoretical models based on material properties and energy minimization using active learning and automated testing.
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leanJ_uniquely_calibrated_via_higher_derivative unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The model solves for force output relative to pressure.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Audrey Nelson, Guy Fragala, and Nancy Menzel. Myths and facts about back injuries in nursing.AJN The American Journal of Nursing, 103(2):32–40, 2003
work page 2003
-
[2]
Continuum robots-a state of the art
Graham Robinson and J Bruce C Davies. Continuum robots-a state of the art. InProceedings 1999 IEEE international conference on robotics and automation (Cat. No. 99CH36288C), volume 4, pages 2849–2854. IEEE, 1999
work page 1999
-
[3]
Anders Pettersson, Steve Davis, John O Gray, Tony J Dodd, and Tomas Ohlsson. Design of a magnetorheological robot gripper for handling of delicate food products with varying shapes. Journal of Food Engineering, 98(3):332–338, 2010
work page 2010
-
[4]
A resilient, untethered soft robot.Soft robotics, 2014
Michael T Tolley, Robert F Shepherd, Kevin C Galloway, Robert J Wood, George M White- sides, et al. A resilient, untethered soft robot.Soft robotics, 2014
work page 2014
-
[5]
Soft robotics: Technologies and systems pushing the boundaries of robot abilities.Sci
Cecilia Laschi, Barbara Mazzolai, and Matteo Cianchetti. Soft robotics: Technologies and systems pushing the boundaries of robot abilities.Sci. Robot, 1(1):eaah3690, 2016
work page 2016
-
[6]
Jessica Yin, Ronan Hinchet, Herbert Shea, and Carmel Majidi. Wearable soft technologies for haptic sensing and feedback.Advanced Functional Materials, page 2007428, 2020
work page 2020
-
[7]
Trivoramai Jiralerspong and Huichan Zhao. Soft robotic devices for mechanotherapy of the upper and lower extremities.Advanced Materials Technologies, 10(10):2401530, 2025
work page 2025
-
[8]
Cecilia Laschi and Matteo Cianchetti. Soft robotics: new perspectives for robot bodyware and control.Frontiers in bioengineering and biotechnology, 2:3, 2014
work page 2014
-
[9]
Bobak Mosadegh, Panagiotis Polygerinos, Christoph Keplinger, Sophia Wennstedt, Robert F Shepherd, Unmukt Gupta, Jongmin Shim, Katia Bertoldi, Conor J Walsh, and George M Whitesides. Pneumatic networks for soft robotics that actuate rapidly.Advanced Functional Materials, 24(15):2163–2170, 2014
work page 2014
-
[10]
Design and implementation of a 300% strain soft artificial muscle
Elliot W Hawkes, David L Christensen, and Allison M Okamura. Design and implementation of a 300% strain soft artificial muscle. In2016 IEEE International Conference on Robotics and Automation (ICRA), pages 4022–4029. IEEE, 2016
work page 2016
-
[11]
Fionnuala Connolly, Conor J Walsh, and Katia Bertoldi. Automatic design of fiber-reinforced soft actuators for trajectory matching.Proceedings of the National Academy of Sciences, 114(1):51–56, 2017
work page 2017
-
[12]
Erik H Skorina, Ming Luo, Wut Yee Oo, Weijia Tao, Fuchen Chen, Sina Youssefian, Nima Rahbar, and Cagdas D Onal. Reverse pneumatic artificial muscles (rpams): Modeling, inte- gration, and control.PloS one, 13(10):e0204637, 2018. 120
work page 2018
-
[13]
Series pneumatic artificial muscles (spams) and application to a soft continuum robot
Joseph D Greer, Tania K Morimoto, Allison M Okamura, and Elliot W Hawkes. Series pneumatic artificial muscles (spams) and application to a soft continuum robot. In2017 IEEE International Conference on Robotics and Automation (ICRA), pages 5503–5510. IEEE, 2017
work page 2017
-
[14]
Audrey Sedal, Alan Wineman, R Brent Gillespie, and C David Remy. Comparison and exper- imental validation of predictive models for soft, fiber-reinforced actuators.The International Journal of Robotics Research, 40(1):119–135, 2021
work page 2021
-
[15]
Nick Sholl, Austin Moss, Mike Krieg, and Kamran Mohseni. Controlling the deformation space of soft membranes using fiber reinforcement.The International Journal of Robotics Research, 40(1):178–196, 2021
work page 2021
-
[16]
PhD thesis, University of Minnesota, 2022
Steven Daniel Thomalla.High-Force Soft Robots with Applications in Burrowing. PhD thesis, University of Minnesota, 2022
work page 2022
-
[17]
Lara Tomholt, Olga Geletina, Jack Alvarenga, Anna V Shneidman, James C Weaver, Matheus C Fernandes, Santiago A Mota, Martin Bechthold, and Joanna Aizenberg. Tunable infrared transmission for energy-efficient pneumatic building façades.Energy and Buildings, 226:110377, 2020
work page 2020
-
[18]
JH Pikul, S Li, H Bai, RT Hanlon, I Cohen, and RF Shepherd. Stretchable surfaces with programmable 3d texture morphing for synthetic camouflaging skins.Science, 358(6360):210– 214, 2017
work page 2017
-
[19]
Navid Feizi, S Farokh Atashzar, Mehrdad R Kermani, and Rajni V Patel. Modeling and high- definition control of a smart electroadhesive actuator: Toward application in rehabilitation. IEEE Transactions on Medical Robotics and Bionics, 4(4):1057–1067, 2022
work page 2022
-
[20]
Fiber embroidery of self-sensing soft actuators.Biomimetics, 3(3):24, 2018
Steven Ceron, Itai Cohen, Robert F Shepherd, James H Pikul, and Cindy Harnett. Fiber embroidery of self-sensing soft actuators.Biomimetics, 3(3):24, 2018
work page 2018
-
[21]
Logic-enabled textiles.Proceedings of the National Academy of Sciences, 119(35):e2202118119, 2022
Anoop Rajappan, Barclay Jumet, Rachel A Shveda, Colter J Decker, Zhen Liu, Te Faye Yap, Vanessa Sanchez, and Daniel J Preston. Logic-enabled textiles.Proceedings of the National Academy of Sciences, 119(35):e2202118119, 2022
work page 2022
-
[22]
Jacob Rogatinsky, Kiran Gomatam, Zi Heng Lim, Megan Lee, Lorenzo Kinnicutt, Chris- tian Duriez, Perry Thomson, Kevin McDonald, and Tommaso Ranzani. A collapsible soft actuator facilitates performance in constrained environments.Advanced Intelligent Systems, 4(10):2200085, 2022
work page 2022
-
[23]
Andrew D Marchese, Russ Tedrake, and Daniela Rus. Dynamics and trajectory optimiza- tion for a soft spatial fluidic elastomer manipulator.The International Journal of Robotics Research, 35(8):1000–1019, 2016
work page 2016
-
[24]
Multi-modal pneumatic actuator for twisting, exten- 121 sion, and bending
Roman Balak and Yi Chen Mazumdar. Multi-modal pneumatic actuator for twisting, exten- 121 sion, and bending. In2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 8673–8679. IEEE, 2020
work page 2020
-
[25]
Mul- timodal soft robot for complex environments using bionic omnidirectional bending actuator
Wenkai Huang, Zhipeng Xu, Junlong Xiao, Wei Hu, Huoqiu Huang, and Fobao Zhou. Mul- timodal soft robot for complex environments using bionic omnidirectional bending actuator. Ieee Access, 8:193827–193844, 2020
work page 2020
-
[26]
A soft robot that navigates its environment through growth.Science Robotics, 2(8):eaan3028, 2017
Elliot W Hawkes, Laura H Blumenschein, Joseph D Greer, and Allison M Okamura. A soft robot that navigates its environment through growth.Science Robotics, 2(8):eaan3028, 2017
work page 2017
-
[27]
Laura H Blumenschein, Margaret M Coad, David A Haggerty, Allison M Okamura, and Elliot W Hawkes. Design, modeling, control, and application of everting vine robots.Frontiers in Robotics and AI, 7:548266, 2020
work page 2020
-
[28]
Andrew A. Stanley and Allison M. Okamura. Controllable surface haptics via particle jam- ming and pneumatics.IEEE Transactions on Haptics, 8(1):20–30, 2015
work page 2015
-
[29]
Electroadhesive auxetics as programmable layer jamming skins forformable crust shapedisplays
Ahad M Rauf, Jack S Bernardo, and Sean Follmer. Electroadhesive auxetics as programmable layer jamming skins forformable crust shapedisplays. In2023 IEEE International Conference on Robotics and Automation (ICRA), pages 2591–2597. IEEE, 2023
work page 2023
-
[30]
De- velopment of soft continuum manipulator with pneumatic and tendon driven actuations
Jun-Young Lee, Eun-Yeong Go, Woo-Young Choi, Woong-Bae Kim, and Kyu-Jin Cho. De- velopment of soft continuum manipulator with pneumatic and tendon driven actuations. In 2016 13th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI), pages 377–379. IEEE, 2016
work page 2016
-
[31]
Luca Arleo, Lucrezia Lorenzon, and Matteo Cianchetti. Variable stiffness linear actuator based on differential drive fiber jamming.IEEE Transactions on Robotics, pages 1–14, 2023
work page 2023
-
[32]
Soft pneumatic actuator with adjustable stiffness layers for multi-dof actuation
Amir Firouzeh, Marco Salerno, and Jamie Paik. Soft pneumatic actuator with adjustable stiffness layers for multi-dof actuation. In2015 IEEE/RSJ International Conference on In- telligent Robots and Systems (IROS), pages 1117–1124. IEEE, 2015
work page 2015
-
[33]
Bilige Yang, Robert Baines, Dylan Shah, Sreekalyan Patiballa, Eugene Thomas, Madhusud- han Venkadesan, and Rebecca Kramer-Bottiglio. Reprogrammable soft actuation and shape- shifting via tensile jamming.Science Advances, 7(40):eabh2073, 2021
work page 2021
-
[34]
Baines.Material System Design for Predictable Shape-Morphing Robots
Robert L. Baines.Material System Design for Predictable Shape-Morphing Robots. PhD thesis, Yale, 2023. Copyright - Database copyright ProQuest LLC; ProQuest does not claim copyright in the individual underlying works; Last updated - 2023-07-18
work page 2023
-
[35]
Auxetic sleeves for soft actuators with kinematically varied surfaces
Audrey Sedal, Michael Fisher, Joshua Bishop-Moser, Alan Wineman, and Sridhar Kota. Auxetic sleeves for soft actuators with kinematically varied surfaces. In2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 464–471, 2018. 122
work page 2018
-
[36]
Multiobjective optimization for stiffness and position control in a soft robot arm module
Yasmin Ansari, Mariangela Manti, Egidio Falotico, Matteo Cianchetti, and Cecilia Laschi. Multiobjective optimization for stiffness and position control in a soft robot arm module. IEEE Robotics and Automation Letters, 3(1):108–115, 2017
work page 2017
-
[37]
Programming 3d curves with discretely constrained cylindrical inflatables
Robert Baines, Sree Kalyan Patiballa, Benjamin Gorissen, Katia Bertoldi, and Rebecca Kramer-Bottiglio. Programming 3d curves with discretely constrained cylindrical inflatables. Advanced Materials, page 2300535, 2023
work page 2023
-
[38]
Dynamically reconfigurable discrete distributed stiffness for inflated beam robots
Brian H Do, Valory Banashek, and Allison M Okamura. Dynamically reconfigurable discrete distributed stiffness for inflated beam robots. In2020 IEEE International Conference on Robotics and Automation (ICRA), pages 9050–9056. IEEE, 2020
work page 2020
-
[39]
Antonio Elia Forte, Paul Z Hanakata, Lishuai Jin, Emilia Zari, Ahmad Zareei, Matheus C Fernandes, Laura Sumner, Jonathan Alvarez, and Katia Bertoldi. Inverse design of inflatable soft membranes through machine learning.Advanced Functional Materials, 32(16):2111610, 2022
work page 2022
-
[40]
Andrew D Marchese and Daniela Rus. Design, kinematics, and control of a soft spatial fluidic elastomer manipulator.The International Journal of Robotics Research, 35(7):840–869, 2016
work page 2016
-
[41]
Autonomous discovery of tough structures.arXiv preprint arXiv:2308.02315, 2023
Kelsey L Snapp, Benjamin Verdier, Aldair Gongora, Samuel Silverman, Adedire D Adesiji, Elise F Morgan, Timothy J Lawton, Emily Whiting, and Keith A Brown. Autonomous discovery of tough structures.arXiv preprint arXiv:2308.02315, 2023
-
[42]
Mariangela Manti, Vito Cacucciolo, and Matteo Cianchetti. Stiffening in soft robotics: A review of the state of the art.IEEE Robotics & Automation Magazine, 23(3):93–106, 2016
work page 2016
-
[43]
Design, fabrication and control of soft robots.Nature, 521(7553):467–475, 2015
Daniela Rus and Michael T Tolley. Design, fabrication and control of soft robots.Nature, 521(7553):467–475, 2015
work page 2015
-
[44]
Multigait soft robot.Proceed- ings of the National Academy of Sciences, 108(51):20400–20403, 2011
Robert F Shepherd, Filip Ilievski, Wonjae Choi, Stephen A Morin, Adam A Stokes, Aaron D Mazzeo, Xin Chen, Michael Wang, and George M Whitesides. Multigait soft robot.Proceed- ings of the National Academy of Sciences, 108(51):20400–20403, 2011
work page 2011
-
[45]
Jsel: Jam- ming skin enabled locomotion
Erik Steltz, Annan Mozeika, Nick Rodenberg, Eric Brown, and Heinrich M Jaeger. Jsel: Jam- ming skin enabled locomotion. In2009 IEEE/RSJ International Conference on Intelligent Robots and Systems, pages 5672–5677. IEEE, 2009
work page 2009
-
[46]
Materials with electroprogrammable stiffness.Advanced Materials, page 2007952, 2021
David J Levine, Kevin T Turner, and James H Pikul. Materials with electroprogrammable stiffness.Advanced Materials, page 2007952, 2021
work page 2021
-
[47]
Hiroya Imamura, Kevin Kadooka, and Minoru Taya. A variable stiffness dielectric elastomer actuator based on electrostatic chucking.Soft matter, 13(18):3440–3448, 2017
work page 2017
-
[48]
Zhanan Zou, Tiefeng Li, Shaoxing Qu, and Honghui Yu. Active Shape Control and Phase 123 CoexistenceofDielectricElastomerMembraneWithPatternedElectrodes.Journal of Applied Mechanics, 81(3), 10 2013. 031016
work page 2013
-
[49]
High force density textile electrostatic clutch.Advanced Materials Technologies, 5(4):1900895, 2019
Ronan Hinchet and Herbert Shea. High force density textile electrostatic clutch.Advanced Materials Technologies, 5(4):1900895, 2019
work page 2019
-
[50]
Dextres: Wearable haptic feedback for grasping in vr via a thin form-factor electrostatic brake
Ronan Hinchet, Velko Vechev, Herbert Shea, and Otmar Hilliges. Dextres: Wearable haptic feedback for grasping in vr via a thin form-factor electrostatic brake. InProceedings of the 31st Annual ACM Symposium on User Interface Software and Technology, pages 901–912, 2018
work page 2018
-
[51]
Stuart B Diller, Steven H Collins, and Carmel Majidi. The effects of electroadhesive clutch design parameters on performance characteristics.Journal of Intelligent Material Systems and Structures, 29(19):3804–3828, 2018
work page 2018
-
[52]
A lightweight, low-power electroadhesive clutch and spring for exoskeleton actuation
Stuart Diller, Carmel Majidi, and Steven H Collins. A lightweight, low-power electroadhesive clutch and spring for exoskeleton actuation. In2016 IEEE International Conference on Robotics and Automation (ICRA), pages 682–689. IEEE, 2016
work page 2016
-
[53]
Soft pneumatic grippers embedded with stretchable electroadhesion
Jianglong Guo, Khaled Elgeneidy, Chaoqun Xiang, Niels Lohse, Laura Justham, and Jonathan Rossiter. Soft pneumatic grippers embedded with stretchable electroadhesion. Smart Materials and Structures, 27(5):055006, 2018
work page 2018
-
[54]
Active con- nection mechanism for soft modular robots.Advanced Robotics, 26(7):785–798, 2012
Jürg Germann, Michael Dommer, Ramon Pericet-Camara, and Dario Floreano. Active con- nection mechanism for soft modular robots.Advanced Robotics, 26(7):785–798, 2012
work page 2012
-
[55]
Soft-bubble: A highly compliant dense geometry tactile sensor for robot manipulation
Alex Alspach, Kunimatsu Hashimoto, Naveen Kuppuswamy, and Russ Tedrake. Soft-bubble: A highly compliant dense geometry tactile sensor for robot manipulation. In2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), pages 597–604. IEEE, 2019
work page 2019
-
[56]
Dassault Systèmes. Abaqus. https://www.3ds.com/products- services/simulia/products/abaqus/, 2020/Standard
work page 2020
-
[57]
Demo 1: Multi-chamber bending spa
Soft Robotics Toolkit. Demo 1: Multi-chamber bending spa. https://softroboticstoolkit.com/book/modeling-soft-pneumatic-actuators/modeling/demo-1, 2016
work page 2016
-
[58]
Cloudcompare.France: EDF R&D Telecom ParisTech, 2016
Daniel Girardeau-Montaut. Cloudcompare.France: EDF R&D Telecom ParisTech, 2016
work page 2016
-
[59]
Elastic energy-recycling actuators for efficient robots
Erez Krimsky and Steven H Collins. Elastic energy-recycling actuators for efficient robots. Science Robotics, 9(88):eadj7246, 2024
work page 2024
-
[60]
Sang Yup Kim, Robert Baines, Joran Booth, Nikolaos Vasios, Katia Bertoldi, and Rebecca Kramer-Bottiglio. Reconfigurable soft body trajectories using unidirectionally stretchable composite laminae.Nature Communications, 10(1):1–8, 2019. 124
work page 2019
-
[61]
Galloway, Panagiotis Polygerinos, Conor J
Kevin C. Galloway, Panagiotis Polygerinos, Conor J. Walsh, and Robert J. Wood. Mechani- cally programmable bend radius for fiber-reinforced soft actuators. In2013 16th International Conference on Advanced Robotics (ICAR), pages 1–6, 2013
work page 2013
-
[62]
An untethered soft cellular robot with variable volume, friction, and unit-to-unit cohesion
Matthew R Devlin, Brad T Young, Nicholas D Naclerio, David A Haggerty, and Elliot W Hawkes. An untethered soft cellular robot with variable volume, friction, and unit-to-unit cohesion. In2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 3333–3339. IEEE, 2020
work page 2020
-
[63]
Electroadhesive clutches for programmable shape morphing of soft actuators
Gregory M Campbell, Jessica Yin, Yuyang Song, Umesh Gandhi, Mark Yim, and James Pikul. Electroadhesive clutches for programmable shape morphing of soft actuators. In 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 11594–11599. IEEE, 2022
work page 2022
-
[64]
Ronan J Hinchet and Herbert Shea. Glove-and sleeve-format variable-friction electrostatic clutches for kinesthetic haptics.Advanced Intelligent Systems, 4(12):2200174, 2022
work page 2022
-
[65]
David J. Levine, Gokulanand M. Iyer, R. Daelan Roosa, Kevin T. Turner, and James H. Pikul. A mechanics-based approach to realize high–force capacity electroadhesives for robots. Science Robotics, 7(72):eabo2179, 2022
work page 2022
-
[66]
A new constitutive relation for rubber.Rubber Chemistry and Technology, 69(1):59–61, 1996
Alan N Gent. A new constitutive relation for rubber.Rubber Chemistry and Technology, 69(1):59–61, 1996
work page 1996
-
[67]
Electro-adhesive tubular clutch for variable-stiffness robots
Yi Sun, Krishna Manaswi Digumarti, Hoang-Vu Phan, Omar Aloui, and Dario Floreano. Electro-adhesive tubular clutch for variable-stiffness robots. In2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 9628–9634. IEEE, 2022
work page 2022
-
[68]
Daniel Steck, Jian Qu, S Baghbani Kordmahale, Daniel Tscharnuter, Anastasia Muliana, and Jun Kameoka. Mechanical responses of ecoflex silicone rubber: Compressible and incom- pressible behaviors.Journal of Applied Polymer Science, 136(5):47025, 2019
work page 2019
-
[69]
Stephen K Melly, Liwu Liu, Yanju Liu, and Jinsong Leng. A review on material models for isotropic hyperelasticity.International Journal of Mechanical System Dynamics, 1(1):71–88, 2021
work page 2021
-
[70]
WW Feng and W-H Yang. On the contact problem of an inflated spherical nonlinear mem- brane.Journal of Applied Mechanics, 1973
work page 1973
-
[71]
William W Feng and Huang Pangnan. On the general contact problem of an inflated nonlinear plane membrane.International Journal of Solids and Structures, 11(4):437–448, 1975
work page 1975
-
[72]
Model and validation of a highly extensible and tough actuator based on a ballooning membrane
Nicolas Herzig, Joanna Jones, Eduardo Perez-Guagnelli, and Dana D Damian. Model and validation of a highly extensible and tough actuator based on a ballooning membrane. In2021 IEEE International Conference on Robotics and Automation (ICRA), pages 11961–11967. 125 IEEE, 2021
work page 2021
-
[73]
Modelling the inflation of an elastic membrane with a load
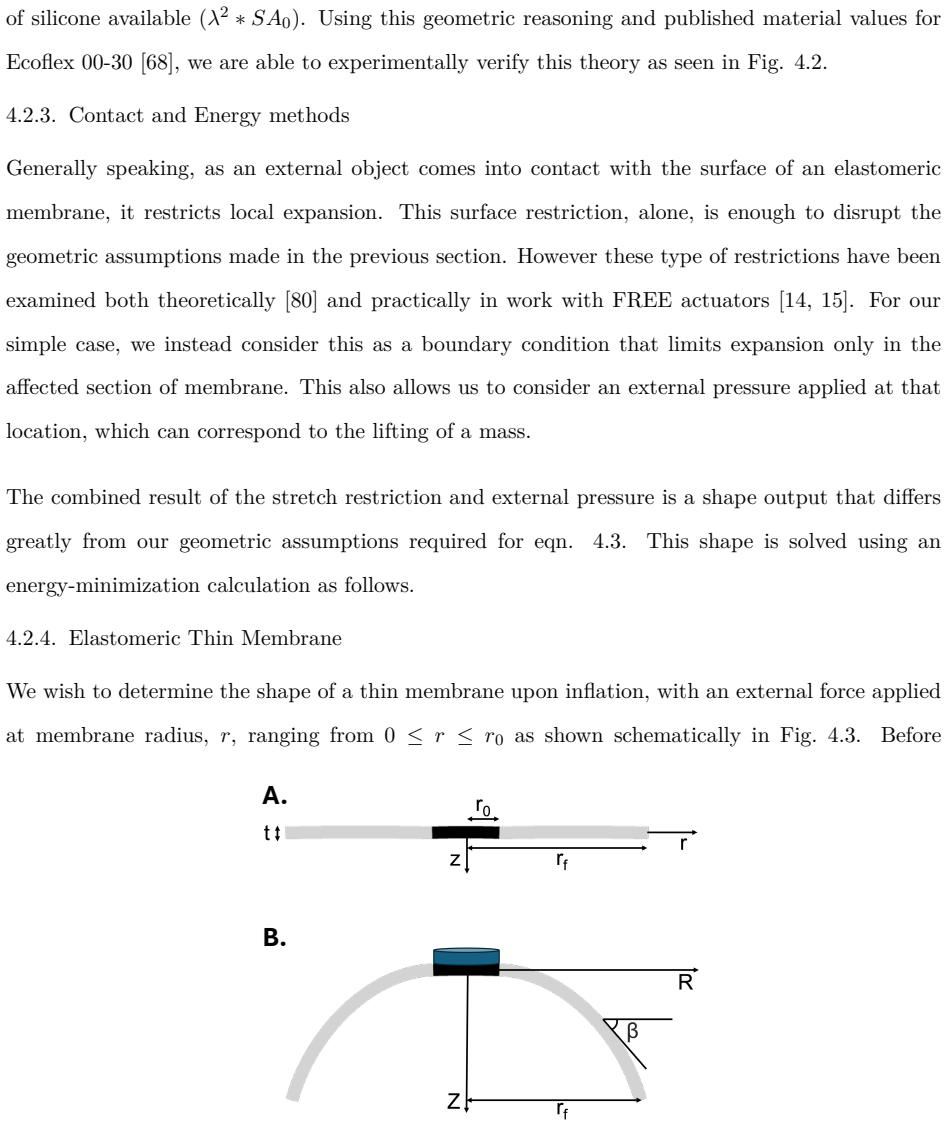
Ge Shi, Azadeh Shariati, Jialei Shi, Nicolas Herzig, Sara-Adela Abad, and Helge A Wurde- mann. Modelling the inflation of an elastic membrane with a load. In2023 IEEE International Conference on Soft Robotics (RoboSoft), pages 1–8. IEEE, 2023
work page 2023
-
[74]
Jonathan William Ambrose, Nicholas Zhang Rong Chiang, Dylan Sin You Cheah, and Chen- Hua Yeow. Compact multilayer extension actuators for reconfigurable soft robots.Soft Robotics, 10(2):301–313, 2023
work page 2023
-
[75]
Joshua Bishop-Moser and Sridhar Kota. Design and modeling of generalized fiber-reinforced pneumatic soft actuators.IEEE Transactions on Robotics, 31(3):536–545, 2015
work page 2015
-
[76]
A survey of deep active learning.ACM computing surveys (CSUR), 54(9):1–40, 2021
Pengzhen Ren, Yun Xiao, Xiaojun Chang, Po-Yao Huang, Zhihui Li, Brij B Gupta, Xiaojiang Chen, and Xin Wang. A survey of deep active learning.ACM computing surveys (CSUR), 54(9):1–40, 2021
work page 2021
-
[77]
Jagdeep Bhatia, Holly Jackson, Yunsheng Tian, Jie Xu, and Wojciech Matusik. Evolution gym: A large-scale benchmark for evolving soft robots.Advances in Neural Information Processing Systems, 34:2201–2214, 2021
work page 2021
-
[78]
Multimodal proximity and visuotactile sensing with a selectively transmissive soft membrane
Jessica Yin, Gregory M Campbell, James Pikul, and Mark Yim. Multimodal proximity and visuotactile sensing with a selectively transmissive soft membrane. In2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), pages 802–808. IEEE, 2022
work page 2022
-
[79]
Samuel Rosset, Luc Maffli, Simon Houis, and Herbert R Shea. An instrument to obtain the correct biaxial hyperelastic parameters of silicones for accurate dea modelling. InElectroactive Polymer Actuators and Devices (EAPAD) 2014, volume 9056, page 90560M. International Society for Optics and Photonics, 2014
work page 2014
-
[80]
Cambridge University Press, 2005
Tsu-Wei Chou.Microstructural Design of Fiber Composites. Cambridge University Press, 2005
work page 2005
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.