Recognition: 2 theorem links
· Lean TheoremInsTraj: Instructing Diffusion Models with Travel Intentions to Generate Real-world Trajectories
Pith reviewed 2026-05-13 17:06 UTC · model grok-4.3
The pith
InsTraj generates realistic GPS trajectories directly from natural language travel intentions by guiding diffusion models with semantic blueprints from large language models.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
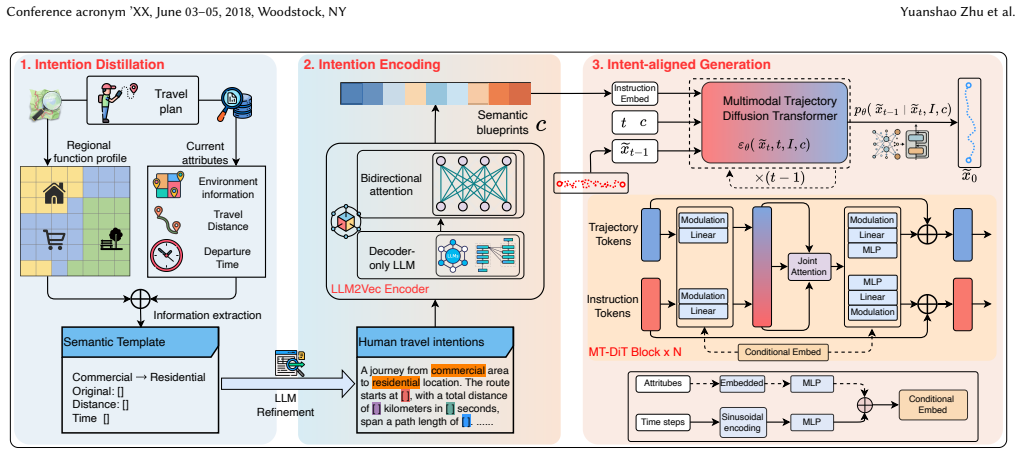
InsTraj instructs diffusion models to generate high-fidelity trajectories directly from natural language descriptions by first using a large language model to decipher unstructured travel intentions into rich semantic blueprints that bridge the representation gap, then applying a multimodal trajectory diffusion transformer that integrates this semantic guidance to produce trajectories adhering to fine-grained user intent while maintaining realism and diversity.
What carries the argument
The multimodal trajectory diffusion transformer that integrates semantic guidance from LLM-interpreted travel intentions to generate instruction-faithful trajectories.
If this is right
- Trajectories can be produced that are realistic in movement patterns yet directly match detailed natural language instructions.
- Urban planning and mobility simulation gain the ability to generate scenarios from plain language descriptions rather than manual parameter tuning.
- Privacy-preserving data sharing becomes more flexible since synthetic trajectories can be tailored to specific user intents without exposing real location records.
- The framework improves handling of complex constraints while preserving the natural diversity found in human travel behavior.
Where Pith is reading between the lines
- The approach could extend to other movement domains, such as generating public transit routes from descriptive prompts about passenger needs.
- Linking the semantic blueprints to live traffic feeds might enable adaptive generation that adjusts trajectories based on current conditions.
- Accurate intent translation could support policy testing by simulating how travel patterns shift under new regulations or infrastructure changes.
Load-bearing premise
A large language model can reliably convert natural language travel intentions into semantic blueprints that a diffusion model translates into spatially and temporally consistent trajectories without introducing systematic biases.
What would settle it
Test the system on instructions that specify impossible timing or contradictory locations, such as visiting two distant points within an unrealistically short window, and check whether generated trajectories violate the stated constraints or omit key intent elements.
Figures






read the original abstract
The generation of realistic and controllable GPS trajectories is a fundamental task for applications in urban planning, mobility simulation, and privacy-preserving data sharing. However, existing methods face a two-fold challenge: they lack the deep semantic understanding to interpret complex user travel intent, and struggle to handle complex constraints while maintaining the realistic diversity inherent in human behavior. To resolve this, we introduce InsTraj, a novel framework that instructs diffusion models to generate high-fidelity trajectories directly from natural language descriptions. Specifically, InsTraj first utilizes a powerful large language model to decipher unstructured travel intentions formed in natural language, thereby creating rich semantic blueprints and bridging the representation gap between intentions and trajectories. Subsequently, we proposed a multimodal trajectory diffusion transformer that can integrate semantic guidance to generate high-fidelity and instruction-faithful trajectories that adhere to fine-grained user intent. Comprehensive experiments on real-world datasets demonstrate that InsTraj significantly outperforms state-of-the-art methods in generating trajectories that are realistic, diverse, and semantically faithful to the input instructions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces InsTraj, a framework that first employs a large language model to convert unstructured natural-language travel intentions into semantic blueprints, then conditions a multimodal trajectory diffusion transformer on these blueprints to generate GPS trajectories. The central claim is that this approach produces trajectories that are more realistic, diverse, and semantically faithful to the input instructions than existing state-of-the-art methods, as demonstrated by comprehensive experiments on real-world datasets.
Significance. If the quantitative claims hold with proper constraint enforcement and ablation evidence, the work would advance controllable trajectory generation for urban planning and mobility simulation by bridging natural language intent with spatially consistent outputs. The use of LLM-derived blueprints and a diffusion transformer is a plausible direction, but the current presentation leaves the realism and fidelity claims difficult to evaluate without explicit conditioning details or hard-constraint mechanisms.
major comments (2)
- [Framework section] Framework description (following the LLM blueprint stage): no explicit mechanism is provided for enforcing hard spatial-temporal constraints such as road-network adherence or speed limits during the diffusion sampling process. The abstract and pipeline overview mention only soft semantic guidance via the multimodal transformer, which risks systematic violations while still scoring well on soft metrics; this directly undermines the outperformance claim on real-world datasets.
- [Experiments section] Experiments section: the abstract asserts significant outperformance on realism, diversity, and semantic fidelity, yet supplies no quantitative metrics, baseline comparisons, ablation studies, error bars, or description of how constraints are enforced. Without these, the central claim cannot be verified and the reported gains may reduce to soft matching rather than genuine constraint satisfaction.
minor comments (1)
- [Method] Notation for the multimodal trajectory diffusion transformer is introduced without a clear diagram or equation set showing the conditioning pathway (e.g., cross-attention formulation or classifier-free guidance scale).
Simulated Author's Rebuttal
We thank the referee for the thoughtful and constructive feedback on our manuscript. We address each major comment in detail below, providing clarifications on the framework and experiments while committing to revisions that strengthen the presentation without altering the core contributions.
read point-by-point responses
-
Referee: [Framework section] Framework description (following the LLM blueprint stage): no explicit mechanism is provided for enforcing hard spatial-temporal constraints such as road-network adherence or speed limits during the diffusion sampling process. The abstract and pipeline overview mention only soft semantic guidance via the multimodal transformer, which risks systematic violations while still scoring well on soft metrics; this directly undermines the outperformance claim on real-world datasets.
Authors: We appreciate the referee pointing out the need for greater clarity on constraint handling. The multimodal trajectory diffusion transformer is trained end-to-end on real-world GPS trajectories that inherently respect road networks and plausible speed profiles; the learned data distribution therefore encodes these constraints implicitly. However, we acknowledge that the current manuscript does not explicitly describe any hard enforcement mechanism (such as post-sampling projection or rejection) during the diffusion process. In the revised version we will add a dedicated paragraph in the Framework section explaining this data-driven implicit enforcement, together with a new quantitative analysis measuring violation rates (e.g., fraction of points falling off the road network) on generated trajectories. This addition will directly address the concern about potential systematic violations. revision: yes
-
Referee: [Experiments section] Experiments section: the abstract asserts significant outperformance on realism, diversity, and semantic fidelity, yet supplies no quantitative metrics, baseline comparisons, ablation studies, error bars, or description of how constraints are enforced. Without these, the central claim cannot be verified and the reported gains may reduce to soft matching rather than genuine constraint satisfaction.
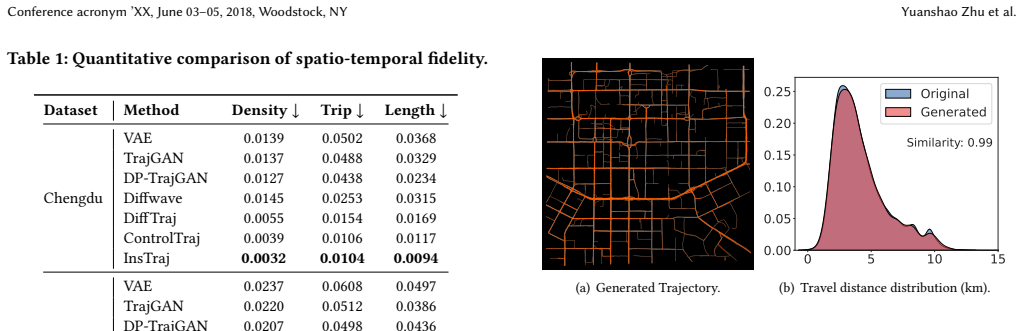
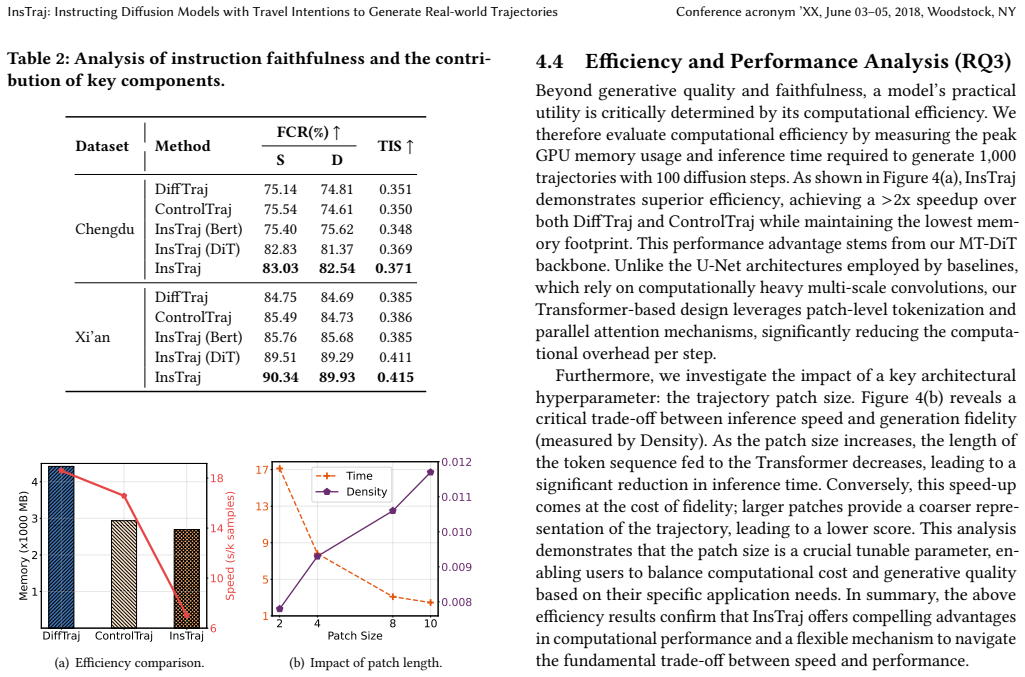
Authors: We regret that the experimental details were not presented with sufficient prominence. Section 4 of the manuscript reports quantitative results on two real-world datasets, including distribution-based realism metrics, diversity measures, and semantic fidelity scores obtained via LLM-based instruction matching. Comparisons are made against multiple baselines (including recent diffusion and GAN-based trajectory generators), with ablation studies isolating the contribution of the LLM-derived blueprints and the multimodal conditioning. Results are averaged over multiple runs with error bars. To resolve the referee’s concern, we will expand the Experiments section with an explicit subsection on constraint satisfaction, reporting measured adherence to road networks and speed limits for both InsTraj and baselines. We will also ensure all numerical values, tables, and ablation figures are cross-referenced clearly from the abstract and introduction. revision: yes
Circularity Check
No circularity: new framework construction with independent components
full rationale
The paper presents InsTraj as a novel pipeline: LLM-based semantic blueprint extraction from natural language followed by conditioning of a multimodal trajectory diffusion transformer. No equations, fitted parameters, or self-citations are shown that reduce the claimed outperformance or trajectory generation process to quantities defined by the authors' own prior work. The derivation chain relies on external LLM capabilities and standard diffusion conditioning rather than self-referential definitions or renamings. This is the most common honest finding for a methods paper introducing a composite architecture.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Diffusion models conditioned on semantic guidance can produce spatially and temporally consistent trajectories that respect user intent.
invented entities (1)
-
multimodal trajectory diffusion transformer
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
InsTraj first utilizes a powerful large language model to decipher unstructured travel intentions... multimodal trajectory diffusion transformer that can integrate semantic guidance
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
MT-DiT... Joint Attention mechanism... adaLN-Zero
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Josh Achiam, Steven Adler, Sandhini Agarwal, Lama Ahmad, Ilge Akkaya, Floren- cia Leoni Aleman, Diogo Almeida, Janko Altenschmidt, Sam Altman, Shyamal Anadkat, et al. 2023. Gpt-4 technical report.arXiv preprint arXiv:2303.08774 (2023)
work page internal anchor Pith review Pith/arXiv arXiv 2023
- [2]
-
[3]
Chu Cao and Mo Li. 2021. Generating mobility trajectories with retained data utility. InProceedings of the 27th ACM SIGKDD conference on knowledge discovery & data mining. 2610–2620
work page 2021
- [4]
-
[5]
Pu Cao, Feng Zhou, Qing Song, and Lu Yang. 2025. Controllable generation with text-to-image diffusion models: A survey.IEEE Transactions on Pattern Analysis and Machine Intelligence(2025)
work page 2025
- [6]
-
[7]
Xinyu Chen, Jiajie Xu, Rui Zhou, Wei Chen, Junhua Fang, and Chengfei Liu. 2021. Trajvae: A variational autoencoder model for trajectory generation.Neurocom- puting428 (2021), 332–339
work page 2021
-
[8]
Jacob Devlin, Ming-Wei Chang, Kenton Lee, and Kristina Toutanova. 2019. Bert: Pre-training of deep bidirectional transformers for language understanding. In Proceedings of the 2019 conference of the North American chapter of the association for computational linguistics: human language technologies,. 4171–4186
work page 2019
-
[9]
Patrick Esser, Sumith Kulal, Andreas Blattmann, Rahim Entezari, Jonas Müller, Harry Saini, Yam Levi, Dominik Lorenz, Axel Sauer, Frederic Boesel, et al. 2024. Scaling rectified flow transformers for high-resolution image synthesis. InForty- first international conference on machine learning
work page 2024
-
[10]
Jie Feng, Yong Li, Chao Zhang, Funing Sun, Fanchao Meng, Ang Guo, and Depeng Jin. 2018. Deepmove: Predicting human mobility with attentional recurrent networks. InProceedings of the 2018 world wide web conference. 1459–1468
work page 2018
-
[11]
Tianyu Gao, Xingcheng Yao, and Danqi Chen. 2021. SimCSE: Simple Contrastive Learning of Sentence Embeddings. InEmpirical Methods in Natural Language Processing (EMNLP)
work page 2021
-
[12]
Chenjuan Guo, Bin Yang, Jilin Hu, and Christian Jensen. 2018. Learning to route with sparse trajectory sets. In2018 IEEE 34th International Conference on Data Engineering (ICDE). IEEE, 1073–1084
work page 2018
-
[13]
Chenjuan Guo, Bin Yang, Jilin Hu, Christian S Jensen, and Lu Chen. 2020. Context- aware, preference-based vehicle routing.The VLDB Journal29 (2020), 1149–1170
work page 2020
-
[14]
Jonathan Ho, Ajay Jain, and Pieter Abbeel. 2020. Denoising diffusion probabilistic models.Advances in neural information processing systems33 (2020), 6840–6851
work page 2020
-
[15]
Jonathan Ho and Tim Salimans. 2022. Classifier-free diffusion guidance.arXiv preprint arXiv:2207.12598(2022)
work page internal anchor Pith review Pith/arXiv arXiv 2022
-
[16]
Zhifeng Kong, Wei Ping, Jiaji Huang, Kexin Zhao, and Bryan Catanzaro. 2020. DiffWave: A Versatile Diffusion Model for Audio Synthesis. InInternational Conference on Learning Representations
work page 2020
-
[17]
Bowen Li, Xiaojuan Qi, Thomas Lukasiewicz, and Philip Torr. 2019. Controllable text-to-image generation.Advances in neural information processing systems32 (2019)
work page 2019
-
[18]
Xia Liu, Hanzhou Chen, and Clio Andris. 2018. trajGANs: Using generative adversarial networks for geo-privacy protection of trajectory data (Vision paper). InLocation privacy and security workshop. 1–7
work page 2018
-
[19]
Zhijun Liu, Yiwei Guo, and Kai Yu. 2023. Diffvoice: Text-to-speech with latent dif- fusion. InIEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP). IEEE
work page 2023
- [20]
-
[21]
Massimiliano Luca, Gianni Barlacchi, Bruno Lepri, and Luca Pappalardo. 2021. A survey on deep learning for human mobility.ACM Computing Surveys (CSUR) 55, 1 (2021), 1–44
work page 2021
-
[22]
Chong Mou, Xintao Wang, Liangbin Xie, Yanze Wu, Jian Zhang, Zhongang Qi, and Ying Shan. 2024. T2i-adapter: Learning adapters to dig out more controllable ability for text-to-image diffusion models. InProceedings of the AAAI conference on artificial intelligence, Vol. 38. 4296–4304
work page 2024
-
[23]
Alexander Quinn Nichol, Prafulla Dhariwal, Aditya Ramesh, Pranav Shyam, Pamela Mishkin, Bob Mcgrew, Ilya Sutskever, and Mark Chen. 2022. GLIDE: Towards Photorealistic Image Generation and Editing with Text-Guided Diffusion Models. InInternational Conference on Machine Learning. PMLR, 16784–16804
work page 2022
-
[24]
Jonas Oppenlaender. 2022. The creativity of text-to-image generation. InPro- ceedings of the 25th international academic mindtrek conference. 192–202
work page 2022
-
[25]
William Peebles and Saining Xie. 2023. Scalable diffusion models with transform- ers. InProceedings of the IEEE/CVF international conference on computer vision. 4195–4205
work page 2023
-
[26]
Mingxing Peng, Kehua Chen, Xusen Guo, Qiming Zhang, Hui Zhong, Meixin Zhu, and Hai Yang. 2025. Diffusion models for intelligent transportation systems: A survey.IEEE Transactions on Intelligent Transportation Systems(2025)
work page 2025
-
[27]
Alec Radford, Jong Wook Kim, Chris Hallacy, Aditya Ramesh, Gabriel Goh, Sandhini Agarwal, Girish Sastry, Amanda Askell, Pamela Mishkin, Jack Clark, et al. 2021. Learning transferable visual models from natural language supervision. InInternational conference on machine learning. PMLR, 8748–8763
work page 2021
-
[28]
Jinmeng Rao, Song Gao, Yuhao Kang, and Qunying Huang. 2020. LSTM-TrajGAN: A Deep Learning Approach to Trajectory Privacy Protection. In11th International Conference on Geographic Information Science (GIScience 2021)
work page 2020
-
[29]
Robin Rombach, Andreas Blattmann, Dominik Lorenz, Patrick Esser, and Björn Ommer. 2022. High-resolution image synthesis with latent diffusion models. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 10684–10695
work page 2022
-
[30]
Chitwan Saharia, William Chan, Saurabh Saxena, Lala Li, Jay Whang, Emily L Denton, Kamyar Ghasemipour, Raphael Gontijo Lopes, Burcu Karagol Ayan, Tim Salimans, et al. 2022. Photorealistic text-to-image diffusion models with deep language understanding.Advances in neural information processing systems35 (2022), 36479–36494
work page 2022
-
[31]
Uriel Singer, Adam Polyak, Thomas Hayes, Xi Yin, Jie An, Songyang Zhang, Qiyuan Hu, Harry Yang, Oron Ashual, Oran Gafni, et al. [n.d.]. Make-A-Video: Text-to-Video Generation without Text-Video Data. InThe Eleventh International Conference on Learning Representations
-
[32]
Hugo Touvron, Thibaut Lavril, Gautier Izacard, Xavier Martinet, Marie-Anne Lachaux, Timothée Lacroix, Baptiste Rozière, Naman Goyal, Eric Hambro, Faisal Azhar, et al. 2023. Llama: Open and efficient foundation language models.arXiv preprint arXiv:2302.13971(2023)
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[33]
Tonglong Wei, Youfang Lin, Shengnan Guo, Yan Lin, Yiheng Huang, Chenyang Xiang, Yuqing Bai, and Huaiyu Wan. 2024. Diff-rntraj: A structure-aware diffusion model for road network-constrained trajectory generation.IEEE Transactions on Knowledge and Data Engineering(2024)
work page 2024
- [34]
-
[35]
Ling Yang, Zhilong Zhang, Yang Song, Shenda Hong, Runsheng Xu, Yue Zhao, Wentao Zhang, Bin Cui, and Ming-Hsuan Yang. 2023. Diffusion models: A comprehensive survey of methods and applications.ACM computing surveys56, Conference acronym ’XX, June 03–05, 2018, Woodstock, NY Yuanshao Zhu et al. 4 (2023), 1–39
work page 2023
- [36]
-
[37]
Jing Zhang, Qihan Huang, Yirui Huang, Qian Ding, and Pei-Wei Tsai. 2022. DP- TrajGAN: A privacy-aware trajectory generation model with differential privacy. Future Generation Computer Systems(2022)
work page 2022
-
[38]
Lvmin Zhang, Anyi Rao, and Maneesh Agrawala. 2023. Adding conditional con- trol to text-to-image diffusion models. InProceedings of the IEEE/CVF international conference on computer vision. 3836–3847
work page 2023
-
[39]
Yuheng Zhang, Yuan Yuan, Jingtao Ding, Jian Yuan, and Yong Li. 2025. Noise Matters: Diffusion Model-based Urban Mobility Generation with Collaborative Noise Priors. InProceedings of the ACM on Web Conference 2025. 5352–5363
work page 2025
-
[40]
Yuanshao Zhu, Yongchao Ye, Shiyao Zhang, Xiangyu Zhao, and James Jianqiao Yu. 2023. DiffTraj: Generating GPS Trajectory with Diffusion Probabilistic Model. InThirty-seventh Conference on Neural Information Processing Systems
work page 2023
-
[41]
Yuanshao Zhu, James Jianqiao Yu, Xiangyu Zhao, Qidong Liu, Yongchao Ye, Wei Chen, Zijian Zhang, Xuetao Wei, and Yuxuan Liang. 2024. Controltraj: Controllable trajectory generation with topology-constrained diffusion model. InProceedings of the 30th ACM SIGKDD Conference on Knowledge Discovery and Data Mining. 4676–4687. InsTraj: Instructing Diffusion Mode...
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.