Recognition: 2 theorem links
· Lean TheoremWaterSplat-SLAM: Photorealistic Monocular SLAM in Underwater Environment
Pith reviewed 2026-05-10 19:31 UTC · model grok-4.3
The pith
WaterSplat-SLAM achieves robust pose estimation and photorealistic dense mapping in underwater environments by coupling semantic medium filtering into two-view 3D reconstruction and using an online medium-aware Gaussian map.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
WaterSplat-SLAM achieves robust pose estimation and photorealistic dense mapping in underwater environments by coupling semantic medium filtering into two-view 3D reconstruction prior to enable underwater-adapted camera tracking and depth estimation, and by presenting a semantic-guided rendering and adaptive map management strategy with an online medium-aware Gaussian map that models the underwater environment in a photorealistic and compact manner.
What carries the argument
The online medium-aware Gaussian map combined with semantic medium filtering, which adapts the representation to water effects during tracking, depth estimation, and rendering.
If this is right
- Camera tracking remains accurate despite water-induced distortions that defeat standard monocular SLAM.
- Dense maps support high-fidelity visual rendering suitable for inspection tasks.
- The representation stays compact while incorporating medium effects through adaptive management.
- Improved mapping directly benefits autonomous underwater vehicle navigation and marine archaeology documentation.
Where Pith is reading between the lines
- The same semantic filtering idea for handling scattering media could transfer to other low-visibility domains such as fog or dust.
- Adding the medium-aware map to multi-camera or sensor-fusion setups might reduce reliance on monocular depth cues.
- Adaptive map management offers a template for SLAM systems facing gradual environmental changes beyond water.
Load-bearing premise
Semantic medium filtering can be effectively coupled into two-view 3D reconstruction to enable accurate underwater-adapted camera tracking and depth estimation without introducing errors that degrade overall performance.
What would settle it
Running the system on an underwater dataset with high or varying turbidity where the reported pose estimation error exceeds that of prior monocular SLAM baselines or where PSNR/SSIM metrics for rendered views fall below competing methods would falsify the central performance claim.
Figures



read the original abstract
Underwater monocular SLAM is a challenging problem with applications from autonomous underwater vehicles to marine archaeology. However, existing underwater SLAM methods struggle to produce maps with high-fidelity rendering. In this paper, we propose WaterSplat-SLAM, a novel monocular underwater SLAM system that achieves robust pose estimation and photorealistic dense mapping. Specifically, we couple semantic medium filtering into two-view 3D reconstruction prior to enable underwater-adapted camera tracking and depth estimation. Furthermore, we present a semantic-guided rendering and adaptive map management strategy with an online medium-aware Gaussian map, modeling underwater environment in a photorealistic and compact manner. Experiments on multiple underwater datasets demonstrate that WaterSplat-SLAM achieves robust camera tracking and high-fidelity rendering in underwater environments.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes WaterSplat-SLAM, a monocular SLAM system for underwater environments that achieves robust pose estimation and photorealistic dense mapping. It couples semantic medium filtering into two-view 3D reconstruction to produce an underwater-adapted prior for camera tracking and depth estimation, and introduces semantic-guided rendering together with adaptive map management using an online medium-aware Gaussian map. Experiments on multiple underwater datasets are reported to demonstrate the system's performance.
Significance. If the central claims are substantiated with quantitative evidence, the work would represent a meaningful advance in underwater SLAM by addressing medium-induced distortions (scattering, attenuation, color shift) through semantic filtering and Gaussian splatting, enabling higher-fidelity rendering than prior underwater methods. This has direct relevance to AUV navigation and marine archaeology. The approach of integrating semantics into both geometry estimation and map management is conceptually promising, but its practical impact cannot be assessed without the missing evaluation details.
major comments (2)
- [Abstract] Abstract: the central claim that the system 'achieves robust camera tracking and high-fidelity rendering' rests on experiments on 'multiple underwater datasets,' yet no quantitative metrics (e.g., ATE, RPE, PSNR, SSIM), error bars, baseline comparisons, or ablation studies isolating the semantic medium filter are provided. This absence prevents verification that the filter improves rather than degrades two-view geometry under low-visibility conditions.
- [Abstract] Abstract (description of semantic medium filtering): the assumption that coupling semantic medium filtering into two-view 3D reconstruction yields an 'underwater-adapted' prior without introducing new failure modes is load-bearing, but no analysis of segmentation error propagation, no bound on segmentation accuracy, and no discussion of how mislabeled medium pixels affect subsequent Gaussian optimization or adaptive map management are supplied.
minor comments (1)
- [Abstract] Abstract: the phrase 'online medium-aware Gaussian map' is introduced without a brief definition or reference to the underlying representation (e.g., 3D Gaussian splatting), which would help readers immediately grasp the technical contribution.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and recommendation for major revision. The points raised highlight areas where additional quantitative evidence and analysis will strengthen the manuscript. We address each major comment below and will incorporate the suggested revisions.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that the system 'achieves robust camera tracking and high-fidelity rendering' rests on experiments on 'multiple underwater datasets,' yet no quantitative metrics (e.g., ATE, RPE, PSNR, SSIM), error bars, baseline comparisons, or ablation studies isolating the semantic medium filter are provided. This absence prevents verification that the filter improves rather than degrades two-view geometry under low-visibility conditions.
Authors: We agree that the abstract would be more informative with explicit metrics. The full manuscript reports ATE, RPE, PSNR, SSIM, and LPIPS results on multiple underwater datasets with baseline comparisons in the Experiments section. To directly address this comment, we will revise the abstract to highlight key quantitative improvements and expand the experimental section with error bars, statistical details, and a dedicated ablation isolating the semantic medium filter's contribution to two-view geometry under low-visibility conditions. revision: yes
-
Referee: [Abstract] Abstract (description of semantic medium filtering): the assumption that coupling semantic medium filtering into two-view 3D reconstruction yields an 'underwater-adapted' prior without introducing new failure modes is load-bearing, but no analysis of segmentation error propagation, no bound on segmentation accuracy, and no discussion of how mislabeled medium pixels affect subsequent Gaussian optimization or adaptive map management are supplied.
Authors: This is a valid observation. The current version emphasizes the benefits of semantic filtering but lacks explicit error analysis. In the revision, we will add a dedicated discussion covering bounds on segmentation accuracy (via IoU on annotated data), propagation of mislabeling errors to depth estimation and Gaussian optimization, and handling strategies in adaptive map management such as confidence-based weighting. This will include potential failure cases and mitigation to substantiate the assumption. revision: yes
Circularity Check
No significant circularity detected in WaterSplat-SLAM derivation
full rationale
The paper proposes a novel monocular underwater SLAM system by introducing semantic medium filtering coupled into two-view 3D reconstruction, semantic-guided rendering, and an adaptive map management strategy with an online medium-aware Gaussian map. These elements are presented as original methodological contributions, with performance claims supported by experiments on multiple underwater datasets rather than by reducing to fitted parameters, self-definitions, or load-bearing self-citations. No equations or steps in the abstract or described chain equate outputs to inputs by construction; the derivation chain remains self-contained through independent algorithmic proposals and empirical validation.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlphaCoordinateFixation.leanalpha_pin_under_high_calibration unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
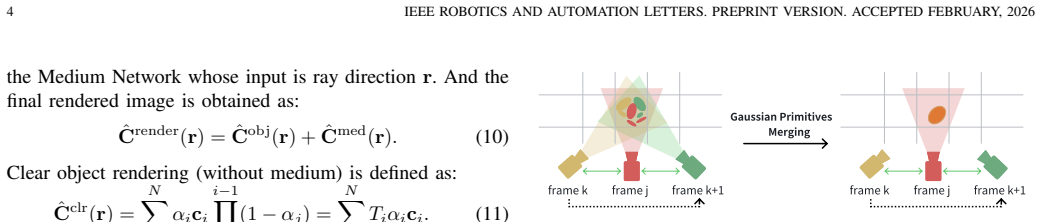
Medium Network (MLP) for acquiring medium parameters σ_attn, σ_bs, and c_med
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Object perception in underwater environments: a survey on sensors and sensing methodologies,
D. Q. Huy, N. Sadjoli, A. B. Azam, B. Elhadidi, Y . Cai, and G. Seet, “Object perception in underwater environments: a survey on sensors and sensing methodologies,”Ocean Engineering, vol. 267, p. 113202, 2023
2023
-
[2]
Qualitative evalua- tion of state-of-the-art dso and orb-slam-based monocular visual slam algorithms for underwater applications,
J. Drupt, C. Dune, A. I. Comport, and V . Hugel, “Qualitative evalua- tion of state-of-the-art dso and orb-slam-based monocular visual slam algorithms for underwater applications,” inOCEANS 2023 - Limerick, 2023, pp. 1–7
2023
-
[3]
Monocular orb-slam appli- cation in underwater scenarios,
F. Hidalgo, C. Kahlefendt, and T. Br ¨aunl, “Monocular orb-slam appli- cation in underwater scenarios,” in2018 OCEANS - MTS/IEEE Kobe Techno-Oceans (OTO), 2018, pp. 1–4
2018
-
[4]
Detecting loop closure using enhanced image for underwater vins-mono,
H. Zhao, R. Zheng, M. Liu, and S. Zhang, “Detecting loop closure using enhanced image for underwater vins-mono,” inGlobal Oceans 2020: Singapore–US Gulf Coast. IEEE, 2020, pp. 1–6
2020
-
[5]
Acoustic camera-based pose graph slam for dense 3-d mapping in underwater environments,
Y . Wang, Y . Ji, H. Woo, Y . Tamura, H. Tsuchiya, A. Yamashita, and H. Asama, “Acoustic camera-based pose graph slam for dense 3-d mapping in underwater environments,”IEEE Journal of Oceanic Engineering, vol. 46, no. 3, pp. 829–847, 2020
2020
-
[6]
Hybrid-vins: Underwater tightly coupled hybrid visual inertial dense slam for auv,
Y . Ou, J. Fan, C. Zhou, P. Zhang, and Z.-G. Hou, “Hybrid-vins: Underwater tightly coupled hybrid visual inertial dense slam for auv,” IEEE Transactions on Industrial Electronics, vol. 72, no. 3, pp. 2821– 2831, 2025
2025
-
[7]
Y . Ou, J. Fan, C. Zhou, P. Zhang, Z. Shen, Y . Fu, X. Liu, and Z. Hou, “An underwater, fault-tolerant, laser-aided robotic multi-modal dense slam system for continuous underwater in-situ observation,”arXiv preprint arXiv:2504.21826, 2025
-
[8]
Structured light-based underwater collision-free navigation and dense mapping system for refined exploration in unknown dark environments,
Y . Ou, J. Fan, C. Zhou, S. Kang, Z. Zhang, Z.-G. Hou, and M. Tan, “Structured light-based underwater collision-free navigation and dense mapping system for refined exploration in unknown dark environments,” IEEE Transactions on Systems, Man, and Cybernetics: Systems, vol. 55, no. 1, pp. 110–123, 2024
2024
-
[9]
Gaussian splatting slam,
H. Matsuki, R. Murai, P. H. Kelly, and A. J. Davison, “Gaussian splatting slam,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), June 2024, pp. 18 039–18 048
2024
-
[10]
Gaussian-slam: Photo-realistic dense slam with gaussian splatting,
V . Yugay, Y . Li, T. Gevers, and M. R. Oswald, “Gaussian-slam: Photo-realistic dense slam with gaussian splatting,” 2024. [Online]. Available: https://arxiv.org/abs/2312.10070
-
[11]
Photo-slam: Real- time simultaneous localization and photorealistic mapping for monocular stereo and rgb-d cameras,
H. Huang, L. Li, H. Cheng, and S.-K. Yeung, “Photo-slam: Real- time simultaneous localization and photorealistic mapping for monocular stereo and rgb-d cameras,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 21 584–21 593
2024
-
[12]
Hi-slam2: Geometry-aware gaussian slam for fast monocular scene reconstruction,
W. Zhang, Q. Cheng, D. Skuddis, N. Zeller, D. Cremers, and N. Haala, “Hi-slam2: Geometry-aware gaussian slam for fast monocular scene reconstruction,”arXiv preprint arXiv:2411.17982, 2024
-
[13]
Mvs-gs: High-quality 3d gaussian splatting mapping via online multi-view stereo,
B. Lee, J. Park, K. T. Giang, S. Jo, and S. Song, “Mvs-gs: High-quality 3d gaussian splatting mapping via online multi-view stereo,” 2024. [Online]. Available: https://arxiv.org/abs/2412.19130
-
[14]
Svin2: An underwater slam system using sonar, visual, inertial, and depth sensor,
S. Rahman, A. Q. Li, and I. Rekleitis, “Svin2: An underwater slam system using sonar, visual, inertial, and depth sensor,” in2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019, pp. 1861–1868
2019
-
[15]
Robust underwater visual slam fusing acoustic sensing,
E. Vargas, R. Scona, J. S. Willners, T. Luczynski, Y . Cao, S. Wang, and Y . R. Petillot, “Robust underwater visual slam fusing acoustic sensing,” in2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2021, pp. 2140–2146
2021
-
[16]
B. Joshi, H. Damron, S. Rahman, and I. Rekleitis, “Sm/vio: Robust underwater state estimation switching between model-based and visual inertial odometry,”arXiv preprint arXiv:2304.01988, 2023
-
[17]
Hybrid visual inertial odometry for robust underwater estimation,
B. Joshi, C. Bandara, I. Poulakakis, H. G. Tanner, and I. Rekleitis, “Hybrid visual inertial odometry for robust underwater estimation,” in OCEANS 2023-MTS/IEEE US Gulf Coast. IEEE, 2023, pp. 1–7
2023
-
[18]
Deepvl: Dynamics and inertial measurements- based deep velocity learning for underwater odometry,
M. Singh and K. Alexis, “Deepvl: Dynamics and inertial measurements- based deep velocity learning for underwater odometry,”arXiv preprint arXiv:2502.07726, 2025
-
[19]
Real-time monocular visual odometry for turbid and dynamic underwater envi- ronments,
M. Ferrera, J. Moras, P. Trouv ´e-Peloux, and V . Creuze, “Real-time monocular visual odometry for turbid and dynamic underwater envi- ronments,”Sensors, vol. 19, no. 3, p. 687, 2019
2019
-
[20]
Improving self-consistency in underwa- ter mapping through laser-based loop closure,
T. Hitchcox and J. R. Forbes, “Improving self-consistency in underwa- ter mapping through laser-based loop closure,”IEEE Transactions on Robotics, vol. 39, no. 3, pp. 1873–1892, 2023
2023
-
[21]
Splat-slam: Globally optimized rgb-only slam with 3d gaussians.arXiv preprint arXiv:2405.16544, 2024
E. Sandstr ¨om, K. Tateno, M. Oechsle, M. Niemeyer, L. Van Gool, M. R. Oswald, and F. Tombari, “Splat-slam: Globally optimized rgb-only slam with 3d gaussians,”arXiv preprint arXiv:2405.16544, 2024
-
[22]
G. Zhang, E. Sandstr ¨om, Y . Zhang, M. Patel, L. Van Gool, and M. R. Oswald, “Glorie-slam: Globally optimized rgb-only implicit encoding point cloud slam,”arXiv preprint arXiv:2403.19549, 2024
-
[23]
Hi-slam: Monocular real-time dense mapping with hybrid implicit fields,
W. Zhang, T. Sun, S. Wang, Q. Cheng, and N. Haala, “Hi-slam: Monocular real-time dense mapping with hybrid implicit fields,”IEEE Robotics and Automation Letters, vol. 9, no. 2, pp. 1548–1555, 2023
2023
-
[24]
Rgb-only gaus- sian splatting slam for unbounded outdoor scenes,
S. Yu, C. Cheng, Y . Zhou, X. Yang, and H. Wang, “Rgb-only gaus- sian splatting slam for unbounded outdoor scenes,”arXiv preprint arXiv:2502.15633, 2025
-
[25]
Dust3r: Geometric 3d vision made easy,
S. Wang, V . Leroy, Y . Cabon, B. Chidlovskii, and J. Revaud, “Dust3r: Geometric 3d vision made easy,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024, pp. 20 697–20 709
2024
-
[26]
Outdoor monocular slam with global scale-consistent 3d gaussian pointmaps,
C. Cheng, S. Yu, Z. Wang, Y . Zhou, and H. Wang, “Outdoor monocular slam with global scale-consistent 3d gaussian pointmaps,”arXiv preprint arXiv:2507.03737, 2025
-
[27]
Grounding image matching in 3d with mast3r,
V . Leroy, Y . Cabon, and J. Revaud, “Grounding image matching in 3d with mast3r,” inEuropean Conference on Computer Vision. Springer, 2024, pp. 71–91
2024
-
[28]
Watersplatting: Fast underwater 3d scene reconstruction using gaussian splatting,
H. Li, W. Song, T. Xu, A. Elsig, and J. Kulhanek, “Watersplatting: Fast underwater 3d scene reconstruction using gaussian splatting,”arXiv preprint arXiv:2408.08206, 2024
-
[29]
Seathru-nerf: Neural radiance fields in scattering media,
D. Levy, A. Peleg, N. Pearl, D. Rosenbaum, D. Akkaynak, S. Korman, and T. Treibitz, “Seathru-nerf: Neural radiance fields in scattering media,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 56–65
2023
-
[30]
Mast3r-slam: Real- time dense slam with 3d reconstruction priors,
R. Murai, E. Dexheimer, and A. J. Davison, “Mast3r-slam: Real- time dense slam with 3d reconstruction priors,”arXiv preprint arXiv:2412.12392, 2024
-
[31]
Image segmentation using text and image prompts,
T. L ¨uddecke and A. Ecker, “Image segmentation using text and image prompts,” inProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), June 2022, pp. 7086–7096
2022
-
[32]
Mast3r-sfm: a fully-integrated solution for unconstrained structure-from-motion,
B. Duisterhof, L. Zust, P. Weinzaepfel, V . Leroy, Y . Cabon, and J. Revaud, “Mast3r-sfm: a fully-integrated solution for unconstrained structure-from-motion,”arXiv preprint arXiv:2409.19152, 2024
-
[33]
Go-slam: Global optimization for consistent 3d instant reconstruction,
Y . Zhang, F. Tosi, S. Mattoccia, and M. Poggi, “Go-slam: Global optimization for consistent 3d instant reconstruction,” inProceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), October 2023, pp. 3727–3737
2023
-
[34]
Learning and aggregating deep local descriptors for instance-level recognition,
G. Tolias, T. Jenicek, and O. Chum, “Learning and aggregating deep local descriptors for instance-level recognition,” inEuropean Conference on Computer Vision. Springer, 2020, pp. 460–477
2020
-
[35]
Orb-slam3: An accurate open-source library for visual, visual– inertial, and multimap slam,
C. Campos, R. Elvira, J. J. G. Rodr ´ıguez, J. M. Montiel, and J. D. Tard´os, “Orb-slam3: An accurate open-source library for visual, visual– inertial, and multimap slam,”IEEE transactions on robotics, vol. 37, no. 6, pp. 1874–1890, 2021
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.