Recognition: no theorem link
Governance-Aware Agent Telemetry for Closed-Loop Enforcement in Multi-Agent AI Systems
Pith reviewed 2026-05-10 18:56 UTC · model grok-4.3
The pith
GAAT closes the observability-enforcement gap by extending OpenTelemetry with real-time declarative policy rules that trigger graduated interventions in multi-agent systems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
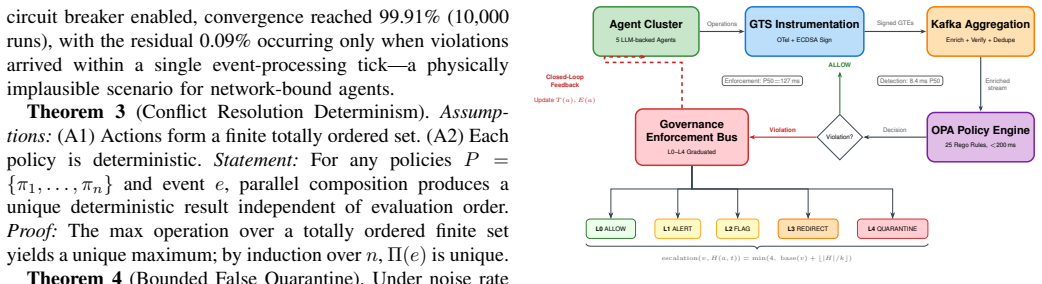
GAAT is a reference architecture that closes the loop between telemetry collection and automated policy enforcement for multi-agent AI systems. It does so by introducing a Governance Telemetry Schema extending OpenTelemetry with governance attributes, a real-time policy violation detection engine using OPA-compatible declarative rules under sub-200 ms latency, a Governance Enforcement Bus with graduated interventions, and a Trusted Telemetry Plane with cryptographic provenance.
What carries the argument
GAAT, the reference architecture that integrates a Governance Telemetry Schema, OPA-compatible real-time detection engine, Governance Enforcement Bus, and Trusted Telemetry Plane to link data collection directly to automated policy response.
If this is right
- Policy violations become detectable and correctable during system operation instead of after damage has occurred.
- Governance attributes added to telemetry enable consistent rule checking across agent interactions.
- Graduated interventions allow proportional responses rather than binary allow-or-block decisions.
- Cryptographic provenance makes telemetry data trustworthy for enforcement decisions.
Where Pith is reading between the lines
- Adoption would shift enterprise governance practices from post-incident review to continuous in-line control.
- Similar closed-loop telemetry patterns could be tested in non-AI distributed systems that already use OpenTelemetry.
- Integration testing against existing agent frameworks would be required to confirm the claimed absence of conflicts.
Load-bearing premise
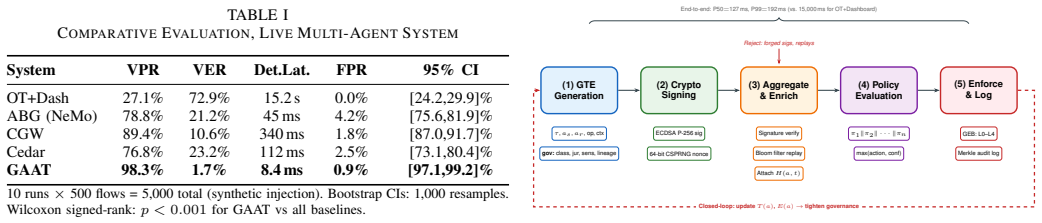
Declarative OPA-compatible rules can detect policy violations in real time at sub-200 ms latency across thousands of inter-agent interactions without false positives, performance degradation, or integration conflicts.
What would settle it
Running the GAAT detection engine on a live multi-agent workload that generates thousands of interactions per hour and measuring whether latency stays below 200 ms, false-positive rate stays near zero, and no framework conflicts appear.
Figures

read the original abstract
Enterprise multi-agent AI systems produce thousands of inter-agent interactions per hour, yet existing observability tools capture these dependencies without enforcing anything. OpenTelemetry and Langfuse collect telemetry but treat governance as a downstream analytics concern, not a real-time enforcement target. The result is an "observe-but-do-not-act" gap where policy violations are detected only after damage is done. We present Governance-Aware Agent Telemetry (GAAT), a reference architecture that closes the loop between telemetry collection and automated policy enforcement for multi-agent systems. GAAT introduces (1) a Governance Telemetry Schema (GTS) extending OpenTelemetry with governance attributes; (2) a real-time policy violation detection engine using OPA-compatible declarative rules under sub-200 ms latency; (3) a Governance Enforcement Bus (GEB) with graduated interventions; and (4) a Trusted Telemetry Plane with cryptographic provenance.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Governance-Aware Agent Telemetry (GAAT) as a reference architecture for enterprise multi-agent AI systems. It extends OpenTelemetry with a Governance Telemetry Schema (GTS) to capture governance attributes, introduces a real-time policy violation detection engine based on OPA-compatible declarative rules claimed to operate under sub-200 ms latency, adds a Governance Enforcement Bus (GEB) for graduated interventions, and includes a Trusted Telemetry Plane with cryptographic provenance. The goal is to close the 'observe-but-do-not-act' gap by enabling automated, real-time policy enforcement on thousands of inter-agent interactions per hour.
Significance. If the claimed latency, reliability, and integration properties can be demonstrated, GAAT would address a practical gap in multi-agent observability by turning passive telemetry into enforceable governance. The architecture proposal is timely given the growth of agentic systems, but its significance is currently limited by the complete absence of implementation details, benchmarks, error analysis, or evaluation data.
major comments (2)
- [Abstract] Abstract: The central claim that the OPA-compatible policy violation detection engine achieves sub-200 ms latency across thousands of inter-agent interactions per hour, while avoiding false positives and performance degradation, is presented without any supporting analysis, pseudocode, complexity bounds, benchmark results, or integration sketch. This feasibility assumption is load-bearing for the assertion that GAAT closes the observe-but-do-not-act gap.
- [Abstract] Abstract and architecture description: The paper introduces the Governance Telemetry Schema (GTS) and Governance Enforcement Bus (GEB) as novel components but provides no discussion of how they avoid integration conflicts with existing frameworks (e.g., Langfuse or standard OpenTelemetry instrumentation) or how cryptographic provenance is maintained under real-time enforcement. These omissions directly affect the practicality of the closed-loop system.
minor comments (1)
- [Abstract] The abstract refers to 'graduated interventions' via the GEB but does not define the intervention levels or their triggering conditions, which would improve clarity even in a reference architecture paper.
Simulated Author's Rebuttal
We thank the referee for the constructive comments highlighting areas where the GAAT reference architecture proposal requires clarification. We address each major comment below and indicate planned revisions to the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the OPA-compatible policy violation detection engine achieves sub-200 ms latency across thousands of inter-agent interactions per hour, while avoiding false positives and performance degradation, is presented without any supporting analysis, pseudocode, complexity bounds, benchmark results, or integration sketch. This feasibility assumption is load-bearing for the assertion that GAAT closes the observe-but-do-not-act gap.
Authors: We acknowledge that the sub-200 ms latency target is stated without original empirical support or pseudocode in the current manuscript. This figure is drawn from OPA's documented performance for declarative policy evaluation under comparable workloads rather than new measurements. As the paper presents a reference architecture, we will revise the abstract to qualify the claim as a design target and add a dedicated subsection on the detection engine. This will include pseudocode for rule evaluation, complexity analysis (constant-time checks for typical governance policies), and discussion of false-positive mitigation via policy tuning. No benchmark results or full integration sketch can be provided, as no prototype implementation exists; these are identified as future work. revision: partial
-
Referee: [Abstract] Abstract and architecture description: The paper introduces the Governance Telemetry Schema (GTS) and Governance Enforcement Bus (GEB) as novel components but provides no discussion of how they avoid integration conflicts with existing frameworks (e.g., Langfuse or standard OpenTelemetry instrumentation) or how cryptographic provenance is maintained under real-time enforcement. These omissions directly affect the practicality of the closed-loop system.
Authors: We agree that explicit discussion of integration and provenance maintenance is needed to demonstrate practicality. In the revised manuscript we will expand the architecture section with a new subsection addressing compatibility. GTS is defined as an extension of OpenTelemetry semantic conventions, allowing coexistence with Langfuse and standard instrumentation without schema conflicts. The Trusted Telemetry Plane will be described as maintaining cryptographic provenance through immutable signed records that are generated prior to any GEB intervention, ensuring the audit trail remains unaltered during real-time enforcement actions. revision: yes
- Absence of implementation details, benchmarks, error analysis, or evaluation data, as the manuscript proposes a reference architecture without an accompanying prototype or experiments.
Circularity Check
No circularity: purely descriptive architecture proposal
full rationale
The manuscript introduces GAAT as a reference architecture with four components (GTS, OPA-based detection engine, GEB, Trusted Telemetry Plane) but contains no equations, derivations, fitted parameters, or self-citations that serve as load-bearing premises. Claims about sub-200 ms latency and zero false positives are presented as architectural properties rather than results derived from prior steps or self-referential definitions. No step reduces to its own inputs by construction; the work is self-contained as a high-level proposal without mathematical or empirical closure loops.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Existing observability tools collect telemetry but treat governance as a downstream analytics concern rather than a real-time enforcement target.
invented entities (2)
-
Governance Telemetry Schema (GTS)
no independent evidence
-
Governance Enforcement Bus (GEB)
no independent evidence
Forward citations
Cited by 1 Pith paper
-
Property-Level Reconstructability of Agent Decisions: An Anchor-Level Pilot Across Vendor SDK Adapter Regimes
Pilot study shows agent decision reconstructability varies by vendor SDK regime, with completeness scores from 42.9% to 85.7% and consistent gaps in reasoning traces.
Reference graph
Works this paper leans on
-
[1]
Regulation (EU) 2024/1689 on Artificial Intelli- gence (AI Act),
European Parliament, “Regulation (EU) 2024/1689 on Artificial Intelli- gence (AI Act),”Official J. European Union, Jun. 2024
2024
-
[2]
AI Risk Management Framework (AI RMF 1.0),
NIST, “AI Risk Management Framework (AI RMF 1.0),” NIST AI 100- 1, Jan. 2023
2023
-
[3]
Semantic Conventions for Generative AI,
OpenTelemetry Authors, “Semantic Conventions for Generative AI,” 2024
2024
-
[4]
Langfuse: Open source LLM engineering platform,
C. Franke and M. Neumann, “Langfuse: Open source LLM engineering platform,” 2023
2023
-
[5]
Governance-Aware Observability Pipeline (GAOP),
P. Kulkarni, “Governance-Aware Observability Pipeline (GAOP),”Int. J. Computer Applications, vol. 187, no. 50, Oct. 2025
2025
-
[6]
NeMo Guardrails: A toolkit for controllable and safe LLM applications,
S. Rebedea et al., “NeMo Guardrails: A toolkit for controllable and safe LLM applications,” inProc. EMNLP: System Demos, 2023, pp. 431– 445
2023
-
[7]
AgentSpec: Customizable runtime enforcement for safe LLM agents,
H. Wang, C. M. Poskitt, and J. Sun, “AgentSpec: Customizable runtime enforcement for safe LLM agents,” inProc. ICSE, 2026
2026
-
[8]
Pro2guard: Proactive runtime enforcement of llm agent safety via probabilistic model checking,
H. Wang et al., “Pro2Guard: Proactive runtime enforcement via proba- bilistic model checking,” arXiv:2508.00500, 2025
-
[9]
Open Policy Agent: Cloud-native authorization,
T. Hinrichs et al., “Open Policy Agent: Cloud-native authorization,” in Proc. USENIX ATC, 2018, pp. 507–519
2018
-
[10]
Cedar: A new policy language for authorization at scale,
E. Kang et al., “Cedar: A new policy language for authorization at scale,” inProc. IEEE IC2E, 2023, pp. 154–162
2023
-
[11]
Istio Service Mesh,
Istio Authors, “Istio Service Mesh,” 2024
2024
-
[12]
Kyverno: Kubernetes Native Policy Management,
Kyverno Authors, “Kyverno: Kubernetes Native Policy Management,” 2024
2024
-
[13]
A brief account of runtime verification,
M. Leucker and C. Schallhart, “A brief account of runtime verification,” J. Logic Algebraic Prog., vol. 78, no. 5, pp. 293–303, 2009
2009
-
[14]
Efficient monitoring of safety properties,
K. Havelund and G. Ros ¸u, “Efficient monitoring of safety properties,” Int. J. STTT, vol. 6, no. 2, pp. 158–173, 2004
2004
-
[15]
MOP: An efficient and generic runtime verifica- tion framework,
F. Chen and G. Ros ¸u, “MOP: An efficient and generic runtime verifica- tion framework,” inProc. ACM OOPSLA, 2007, pp. 569–588
2007
-
[16]
Z. Xiang et al., “GuardAgent: Safeguard LLM agents via knowledge- enabled reasoning,” arXiv:2406.09187, 2024
-
[17]
Agent safety: A survey of risks for LLM-based agents,
X. Wang et al., “Agent safety: A survey of risks for LLM-based agents,” arXiv:2401.03586, 2024
-
[18]
The Rise and Potential of Large Language Model Based Agents: A Survey
Z. Xi et al., “The rise and potential of large language model based agents: A survey,” arXiv:2309.07864, 2023
work page internal anchor Pith review arXiv 2023
-
[19]
A survey on LLM based autonomous agents,
L. Wang et al., “A survey on LLM based autonomous agents,”Front. Comput. Sci., vol. 18, no. 6, 2024
2024
-
[20]
Generative agents: Interactive simulacra of human behavior,
J. S. Park et al., “Generative agents: Interactive simulacra of human behavior,” inProc. ACM UIST, 2023, pp. 1–22
2023
-
[21]
LangChain: Building applications with LLMs through composability,
J. Wu et al., “LangChain: Building applications with LLMs through composability,” 2022
2022
-
[22]
AutoGen: Enabling Next-Gen LLM Applications via Multi-Agent Conversation
Q. Wu et al., “AutoGen: Enabling next-gen LLM applications via multi- agent conversation,” arXiv:2308.08155, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[23]
Policy-as-code for multi-agent systems,
A. Hamon et al., “Policy-as-code for multi-agent systems,” inProc. IEEE CLOUD, 2024, pp. 234–245
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.