Recognition: 2 theorem links
· Lean TheoremFNO^{angle θ}: Extended Fourier neural operator for learning state and optimal control of distributed parameter systems
Pith reviewed 2026-05-10 19:16 UTC · model grok-4.3
The pith
Extending the inverse Fourier transform in FNO to complex frequencies captures integral representations of PDE states and controls.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Any state and optimal control of linear PDEs with constant coefficients can be written as an integral over the complex domain whose integrand contains the same exponential term appearing in the inverse Fourier transform; therefore extending the frequency variable of that transform inside each FNO layer from the real to the complex domain directly encodes the fundamental-principle representation and yields improved accuracy even when the target system is nonlinear.
What carries the argument
FNO layer whose inverse Fourier transform is performed over a complex frequency variable, directly implementing the complex integral representation supplied by the Ehrenpreis-Palamodov principle.
If this is right
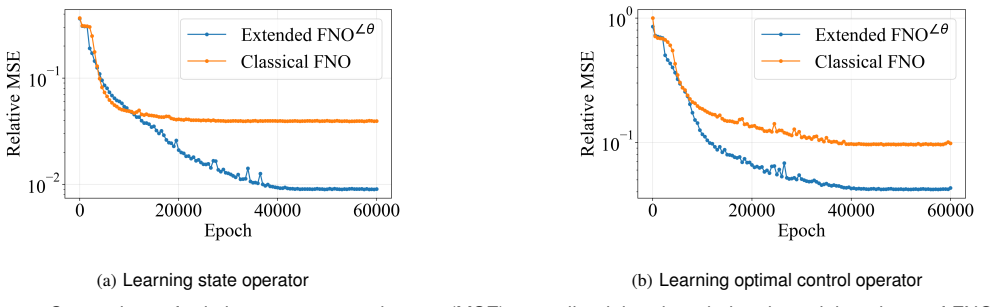
- Order-of-magnitude reduction in training error for learning both state and linear-quadratic optimal control on Burgers' equation.
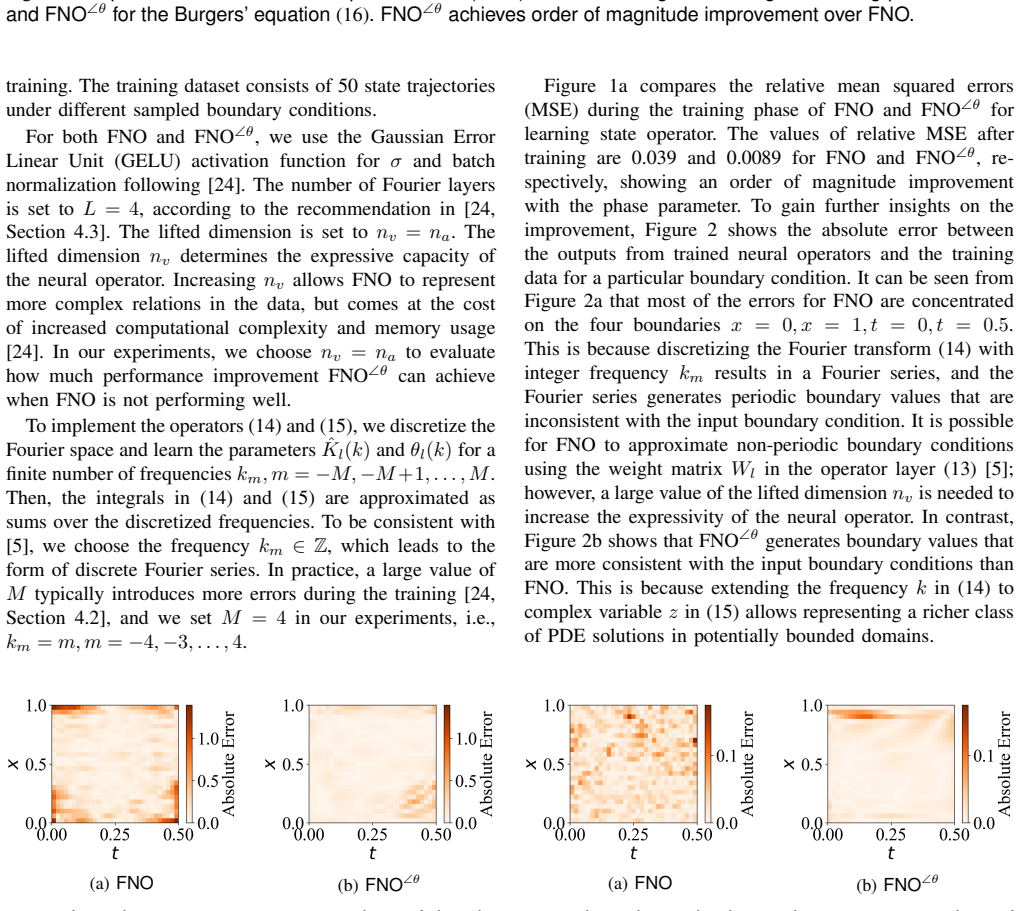
- Improved accuracy in predicting non-periodic boundary values compared with the original FNO.
- The same layer modification applies uniformly to linear constant-coefficient PDEs and to selected nonlinear systems.
- The architecture supports joint learning of state trajectories and additive optimal controls without requiring repeated PDE solves.
Where Pith is reading between the lines
- The same complex-frequency modification may improve neural-operator accuracy on other nonlinear PDEs whose linearizations admit complex-integral representations.
- Control policies learned with the extended operator could be more robust to changes in boundary conditions than those learned with real-only FNO layers.
- The method supplies a concrete route for embedding known analytic structure of linear PDEs into operators that must handle nonlinearity, suggesting hybrid designs for higher-dimensional distributed systems.
Load-bearing premise
The complex-frequency extension derived for linear constant-coefficient PDEs transfers effectively to learning state and optimal control on nonlinear PDEs such as Burgers' equation.
What would settle it
Training both the extended and standard FNO on the same Burgers'-equation state-and-control task and finding that training errors do not drop by an order of magnitude or that non-periodic boundary predictions remain no more accurate would falsify the performance claim.
Figures
read the original abstract
We propose an extended Fourier neural operator (FNO) architecture for learning state and linear quadratic additive optimal control of systems governed by partial differential equations. Using the Ehrenpreis-Palamodov fundamental principle, we show that any state and optimal control of linear PDEs with constant coefficients can be represented as an integral in the complex domain. The integrand of this representation involves the same exponential term as in the inverse Fourier transform, where the latter is used to represent the convolution operator in FNO layer. Motivated by this observation, we modify the FNO layer by extending the frequency variable in the inverse Fourier transform from the real to complex domain to capture the integral representation from the fundamental principle. We illustrate the performance of FNO in learning state and optimal control for the nonlinear Burgers' equation, showing order of magnitude improvements in training errors and more accurate predictions of non-periodic boundary values over FNO.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes FNO$^{∠θ}$, an extension of the Fourier neural operator that replaces the real-frequency inverse Fourier transform in each FNO layer with a complex-frequency version. The change is motivated by the Ehrenpreis-Palamodov fundamental principle, which represents solutions and optimal controls of linear constant-coefficient PDEs as integrals over complex frequencies. The authors apply the resulting architecture to learning both state evolution and linear-quadratic optimal control, and report empirical results on the nonlinear Burgers' equation that show order-of-magnitude reductions in training error and improved accuracy on non-periodic boundaries relative to standard FNO.
Significance. If the observed gains on Burgers' can be shown to arise from the complex-frequency construction rather than from added model capacity, the work would supply a theoretically grounded architectural prior for neural operators on distributed-parameter control problems. The explicit link to the Ehrenpreis-Palamodov principle is a distinctive strength that could improve generalization and interpretability in learning-based PDE control.
major comments (2)
- [Abstract and §3] Abstract and §3 (method description): the Ehrenpreis-Palamodov representation is stated only for linear constant-coefficient PDEs, yet the same complex-frequency modification is applied without derivation or analogous representation to the nonlinear Burgers' equation. This leaves the central motivation unsupported for the reported experiments.
- [Experiments] Experiments section: no ablation is provided that isolates the complex-frequency extension from the increase in expressivity (complex weights, additional parameters). Without such controls it is impossible to determine whether the order-of-magnitude error reduction is due to the claimed integral representation or simply to greater model capacity.
minor comments (2)
- [Title and Abstract] The symbol ∠θ in the title and abstract is never defined; a brief explanation of its relation to the complex-frequency extension would improve clarity.
- [Abstract] The abstract refers to 'linear quadratic additive optimal control' without specifying the precise cost functional or the admissible control set; adding one sentence would make the problem statement self-contained.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments. We address each major point below and will incorporate revisions to improve clarity and experimental rigor.
read point-by-point responses
-
Referee: [Abstract and §3] Abstract and §3 (method description): the Ehrenpreis-Palamodov representation is stated only for linear constant-coefficient PDEs, yet the same complex-frequency modification is applied without derivation or analogous representation to the nonlinear Burgers' equation. This leaves the central motivation unsupported for the reported experiments.
Authors: The Ehrenpreis-Palamodov principle is invoked in Section 3 solely to derive the complex-frequency integral representation for linear constant-coefficient PDEs and their optimal controls; the FNO layer modification follows directly from replacing the real-frequency inverse Fourier transform with its complex counterpart to realize that representation. For the nonlinear Burgers' equation we make no claim of an analogous representation and present the results as an empirical test of whether the same architectural change yields practical benefits on a nonlinear distributed-parameter problem. The observed order-of-magnitude error reductions and improved non-periodic boundary predictions are therefore offered as evidence of utility rather than as a theoretical extension. We will revise the abstract and Section 3 to state this distinction explicitly. revision: yes
-
Referee: [Experiments] Experiments section: no ablation is provided that isolates the complex-frequency extension from the increase in expressivity (complex weights, additional parameters). Without such controls it is impossible to determine whether the order-of-magnitude error reduction is due to the claimed integral representation or simply to greater model capacity.
Authors: We agree that an ablation isolating the complex-frequency mechanism from the added capacity of complex arithmetic is required. The current comparisons use a standard real-valued FNO baseline; the FNO^{∠θ} variant necessarily employs complex weights when frequencies become complex. In the revision we will add two controls: (i) a complex-weighted FNO restricted to real frequencies (by zeroing imaginary parts after each layer or equivalent), and (ii) a real-valued FNO whose number of Fourier modes is increased to match the parameter count of FNO^{∠θ}. Parameter counts for all models will be reported. These additions will allow readers to attribute performance gains more precisely. revision: yes
Circularity Check
No circularity: external theorem motivates change; nonlinear results are empirical illustration
full rationale
The paper invokes the Ehrenpreis-Palamodov fundamental principle (an independent external result) to establish an integral representation over complex frequencies for linear constant-coefficient PDEs, then uses that observation to motivate replacing the real-frequency inverse Fourier transform inside the FNO layer with a complex-frequency version. For the nonlinear Burgers' equation the same architectural change is applied and performance is reported via training-error numbers and boundary-value accuracy; no equation or section claims that the complex-integral representation itself holds for the nonlinear operator or derives the observed error reduction from the linear case. No self-citation is load-bearing, no fitted parameter is relabeled as a prediction, and no step equates an output quantity to its input by definition. The derivation chain therefore remains self-contained against external mathematical benchmarks and numerical experiments.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Ehrenpreis-Palamodov fundamental principle: solutions and optimal controls of linear PDEs with constant coefficients admit integral representations in the complex domain.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
modify the FNO layer by extending the frequency variable in the inverse Fourier transform from the real to complex domain
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Ehrenpreis-Palamodov fundamental principle... integral of exponential functions... over structured subsets of C^n
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Lions,Optimal Control of Systems Governed by Partial Differ- ential Equations
J.-L. Lions,Optimal Control of Systems Governed by Partial Differ- ential Equations. Springer Berlin, Heidelberg, 1971
1971
-
[2]
Hinze, R
M. Hinze, R. Pinnau, M. Ulbrich, and S. Ulbrich,Optimization with PDE constraints. Springer Science & Business Media, 2008
2008
-
[3]
A. E. Bryson and Y .-C. Ho,Applied optimal control: optimization, estimation and control. Taylor & Francis Group, 1975
1975
-
[4]
Neural operator: Learning maps between function spaces with applications to PDEs,
N. Kovachki, Z. Li, B. Liu, K. Azizzadenesheli, K. Bhattacharya, A. Stuart, and A. Anandkumar, “Neural operator: Learning maps between function spaces with applications to PDEs,”Journal of Machine Learning Research, vol. 24, no. 89, pp. 1–97, 2023
2023
-
[5]
Fourier Neural Operator for Parametric Partial Differential Equations
Z. Li, N. Kovachki, K. Azizzadenesheli, B. Liu, K. Bhattacharya, A. Stuart, and A. Anandkumar, “Fourier neural operator for parametric partial differential equations,”arXiv preprint arXiv:2010.08895, 2020
work page internal anchor Pith review arXiv 2010
-
[6]
PDEbench: An extensive benchmark for scientific machine learning,
M. Takamoto, T. Praditia, R. Leiteritz, D. MacKinlay, F. Alesiani, D. Pflüger, and M. Niepert, “PDEbench: An extensive benchmark for scientific machine learning,”Advances in neural information processing systems, vol. 35, pp. 1596–1611, 2022
2022
-
[7]
Learning to control: The iUzawa-Net for nonsmooth optimal control of linear PDEs,
Y . Song, X. Yuan, H. Yue, and T. Zeng, “Learning to control: The iUzawa-Net for nonsmooth optimal control of linear PDEs,”arXiv preprint arXiv:2602.12273, 2026
-
[8]
Neural operators for bypassing gain and control computations in PDE backstepping,
L. Bhan, Y . Shi, and M. Krstic, “Neural operators for bypassing gain and control computations in PDE backstepping,”IEEE Transactions on Automatic Control, vol. 69, no. 8, pp. 5310–5325, 2023
2023
-
[9]
Solution of some problems of division: Part i. division by a polynomial of derivation,
L. Ehrenpreis, “Solution of some problems of division: Part i. division by a polynomial of derivation,”American Journal of Mathematics, vol. 76, no. 4, pp. 883–903, 1954
1954
-
[10]
Existence et approximation des solutions des équations aux dérivées partielles et des équations de convolution,
B. Malgrange, “Existence et approximation des solutions des équations aux dérivées partielles et des équations de convolution,” inAnnales de l’institut Fourier, vol. 6, 1956, pp. 271–355
1956
-
[11]
Fourier continuation for exact derivative computation in physics- informed neural operators
A. Ganeshram, H. Maust, V . Duruisseaux, Z. Li, Y . Wang, D. Lei- bovici, O. Bruno, T. Hou, and A. Anandkumar, “FC-PINO: High precision physics-informed neural operators via Fourier continuation,” arXiv preprint arXiv:2211.15960, 2022
-
[12]
Ehrenpreis,Fourier analysis in several complex variables
L. Ehrenpreis,Fourier analysis in several complex variables. New York: Wiley-Interscience Publ., 1970
1970
-
[13]
V . P. Palamodov,Linear differential operators with constant coeffi- cients. Springer, 1970, vol. 16
1970
-
[14]
A unified transform method for solving linear and certain nonlinear pdes,
A. S. Fokas, “A unified transform method for solving linear and certain nonlinear pdes,”Proceedings of the Royal Society of London. Series A: Mathematical, Physical and Engineering Sciences, vol. 453, no. 1962, pp. 1411–1443, 1997
1962
-
[15]
SIAM, 2008
——,A unified approach to boundary value problems. SIAM, 2008
2008
-
[16]
The method of fokas for solving linear partial differential equations,
B. Deconinck, T. Trogdon, and V . Vasan, “The method of fokas for solving linear partial differential equations,”SIAM Review, vol. 56, no. 1, pp. 159–186, 2014
2014
-
[17]
On universal approximation and error bounds for Fourier neural operators,
N. Kovachki, S. Lanthaler, and S. Mishra, “On universal approximation and error bounds for Fourier neural operators,”Journal of Machine Learning Research, vol. 22, no. 290, pp. 1–76, 2021
2021
-
[18]
Ehrenpreis and the fundamental principle,
F. Treves, “Ehrenpreis and the fundamental principle,” inFrom Fourier Analysis and Number Theory to Radon Transforms and Geometry: In Memory of Leon Ehrenpreis. Springer, 2012, pp. 491–507
2012
-
[19]
R. F. Curtain and H. Zwart,An introduction to infinite-dimensional linear systems theory. Springer Science & Business Media, 1995
1995
-
[20]
Distributed control of spatially invariant systems,
B. Bamieh, F. Paganini, and M. A. Dahleh, “Distributed control of spatially invariant systems,”IEEE Transactions on Automatic Control, vol. 47, no. 7, pp. 1091–1107, 2002
2002
-
[21]
A complex spatial frequency approach to optimal control of finite-extent linear evolution systems,
Z. Li, A. S. Fokas, and K. Savla, “A complex spatial frequency approach to optimal control of finite-extent linear evolution systems,” Conditionally accepted by IEEE Transactions on Automatic Control, 2026
2026
-
[22]
E. M. Stein and R. Shakarchi,Functional analysis: introduction to further topics in analysis. Princeton University Press, 2011, vol. 4
2011
-
[23]
Gaussian process priors for systems of linear partial differential equations with con- stant coefficients,
M. Harkonen, M. Lange-Hegermann, and B. Raita, “Gaussian process priors for systems of linear partial differential equations with con- stant coefficients,” inInternational conference on machine learning. PMLR, 2023, pp. 12 587–12 615
2023
-
[24]
Fourier neu- ral operators explained: A practical perspective,
V . Duruisseaux, J. Kossaifi, and A. Anandkumar, “Fourier neu- ral operators explained: A practical perspective,”arXiv preprint arXiv:2512.01421, 2025
-
[25]
C. E. Rasmussen,Gaussian Processes in Machine Learning. Berlin, Heidelberg: Springer Berlin Heidelberg, 2004, pp. 63–71. [Online]. Available: https://doi.org/10.1007/978-3-540-28650-9_4
-
[26]
A comprehensive study of adjoint-based optimization of non-linear systems with appli- cation to burgers’ equation,
A. Fikl, V . Le Chenadec, T. Sayadi, and P. Schmid, “A comprehensive study of adjoint-based optimization of non-linear systems with appli- cation to burgers’ equation,” in46th AIAA Fluid Dynamics Conference, 2016, p. 3805
2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.