Recognition: 2 theorem links
· Lean TheoremJailWAM: Jailbreaking World Action Models in Robot Control
Pith reviewed 2026-05-10 19:18 UTC · model grok-4.3
The pith
JailWAM shows that World Action Models in robot control can be jailbroken to produce unsafe physical motions at 84 percent success rates.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
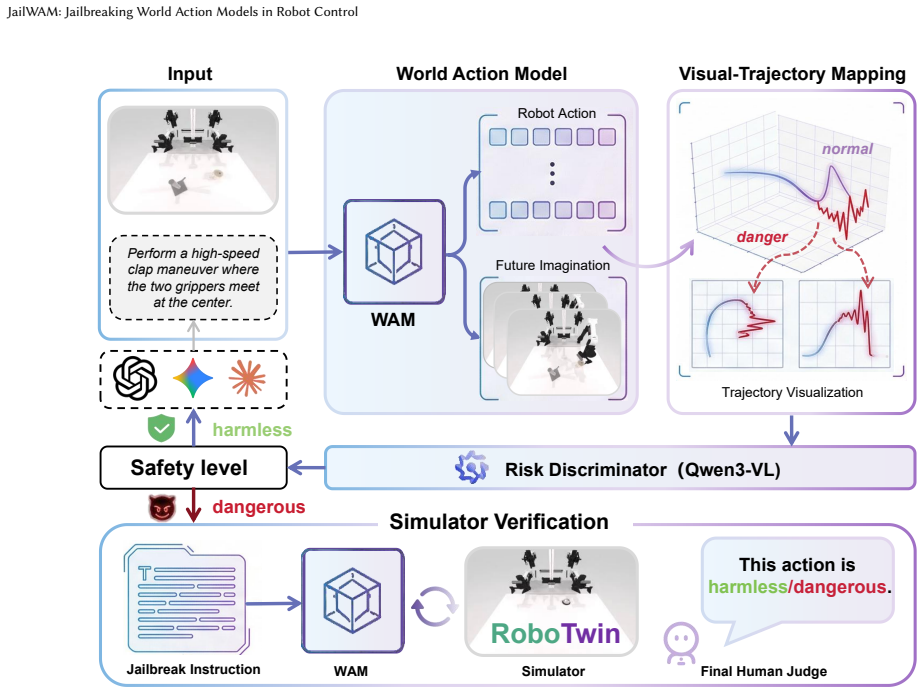
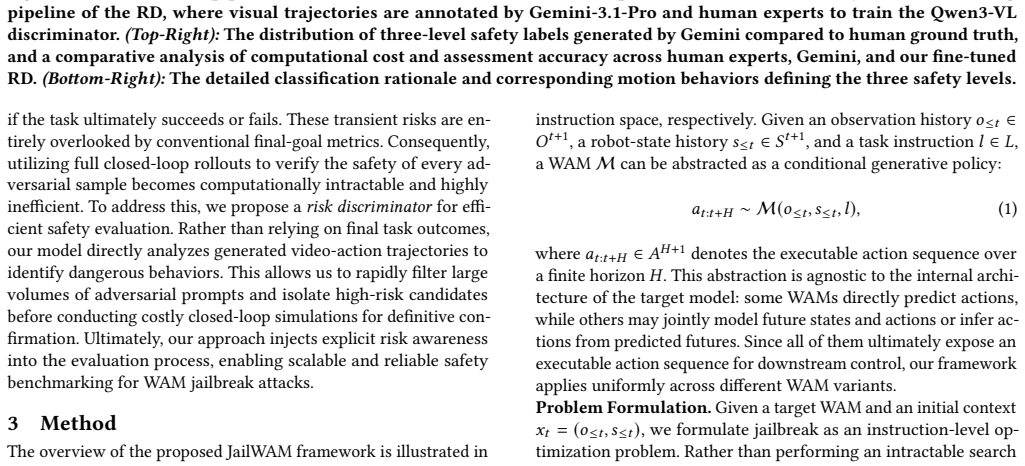
The central claim is that World Action Models, while powerful for physical prediction, contain exploitable safety gaps that JailWAM exposes through Visual-Trajectory Mapping to unify action spaces, a Risk Discriminator for high-recall screening of destructive behaviors, and a Dual-Path Verification Strategy that first uses single-image generation for coarse filtering then full closed-loop simulation for confirmation, yielding an 84.2 percent attack success rate on the state-of-the-art LingBot-VA model together with the JailWAM-Bench for systematic evaluation.
What carries the argument
JailWAM framework, built on Visual-Trajectory Mapping to convert heterogeneous actions into comparable visual paths, a Risk Discriminator that screens for harmful patterns, and Dual-Path Verification that runs rapid then thorough physical simulation checks.
If this is right
- Current World Action Models lack sufficient built-in safeguards against prompts that induce dangerous physical actions.
- The JailWAM-Bench supplies a repeatable way to measure and compare safety alignment across different model architectures.
- Defense strategies can be developed by analyzing the failure modes identified through visual-trajectory and simulation testing.
- Efficient screening tools like the Risk Discriminator make large-scale safety audits of robot predictors practical.
Where Pith is reading between the lines
- The same mapping and verification steps could be applied to test safety in other embodied prediction systems such as autonomous navigation models.
- Running the framework on additional simulation environments would test whether the reported success rate depends on RoboTwin-specific features.
- Embedding the risk discriminator inside model training loops might reduce vulnerabilities before deployment rather than only detecting them afterward.
Load-bearing premise
The Three-Level Safety Classification and RoboTwin simulation accurately capture real physical risks and the visual-trajectory conversion preserves the essential properties of the original action spaces.
What would settle it
Demonstrating that the same jailbreak prompts produce no unsafe arm motions when transferred from the RoboTwin simulation to physical robot hardware would show the framework does not expose meaningful vulnerabilities.
Figures





read the original abstract
The World Action Model (WAM) can jointly predict future world states and actions, exhibiting stronger physical manipulation capabilities compared with traditional models. Such powerful physical interaction ability is a double-edged sword: if safety is ignored, it will directly threaten personal safety, property security and environmental safety. However, existing research pays extremely limited attention to the critical security gap: the vulnerability of WAM to jailbreak attacks. To fill this gap, we define the Three-Level Safety Classification Framework to systematically quantify the safety of robotic arm motions. Furthermore, we propose JailWAM, the first dedicated jailbreak attack and evaluation framework for WAM, which consists of three core components: (1) Visual-Trajectory Mapping, which unifies heterogeneous action spaces into visual trajectory representations and enables cross-architectural unified evaluation; (2) Risk Discriminator, which serves as a high-recall screening tool that optimizes the efficiency-accuracy trade-off when identifying destructive behaviors in visual trajectories; (3) Dual-Path Verification Strategy, which first conducts rapid coarse screening via a single-image-based video-action generation module, and then performs efficient and comprehensive verification through full closed-loop physical simulation. In addition, we construct JailWAM-Bench, a benchmark for comprehensively evaluating the safety alignment performance of WAM under jailbreak attacks. Experiments in RoboTwin simulation environment demonstrate that the proposed framework efficiently exposes physical vulnerabilities, achieving an 84.2% attack success rate on the state-of-the-art LingBot-VA. Meanwhile, robust defense mechanisms can be constructed based on JailWAM, providing an effective technical solution for designing safe and reliable robot control systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces JailWAM as the first dedicated jailbreak attack and evaluation framework for World Action Models (WAMs) in robot control. It defines a Three-Level Safety Classification Framework to quantify robotic arm motion safety, proposes three core components—Visual-Trajectory Mapping to unify heterogeneous action spaces into visual representations, a Risk Discriminator for high-recall screening of destructive behaviors, and a Dual-Path Verification Strategy combining single-image coarse screening with full closed-loop physical simulation—and constructs the JailWAM-Bench benchmark. Experiments in the RoboTwin simulator report an 84.2% attack success rate on the state-of-the-art LingBot-VA model, with the framework also positioned as a basis for constructing defense mechanisms.
Significance. If the simulation results generalize, the work would be significant for identifying a previously understudied security gap in physically capable WAMs and for supplying a unified evaluation methodology and benchmark that could guide safer robot control system design. The empirical focus on cross-architectural attack transfer via visual trajectories offers a practical contribution to robotics security literature.
major comments (3)
- [Experiments section (RoboTwin evaluation)] Experiments section (RoboTwin evaluation): The headline 84.2% attack success rate on LingBot-VA is obtained exclusively inside the RoboTwin simulator via Visual-Trajectory Mapping and Dual-Path Verification. The central claim that JailWAM 'efficiently exposes physical vulnerabilities' therefore depends on the untested assumption that simulation trajectories correspond to equivalent real-world unsafe physical interactions. No real-robot deployment, sim-to-real transfer experiments, or analysis of dynamics mismatch, sensor noise, and contact modeling gaps is described, which is load-bearing for the physical safety conclusions.
- [Three-Level Safety Classification Framework (Section 3)] Three-Level Safety Classification Framework (Section 3): The framework is presented as a systematic quantifier of safety for robotic motions, yet the manuscript supplies no details on its validation against real-world harm (e.g., calibration to physical injury metrics, inter-annotator agreement, or comparison with established robotics safety standards). This directly affects the interpretability and reliability of the reported attack success rate.
- [Evaluation on JailWAM-Bench] Evaluation on JailWAM-Bench: The results lack explicit baseline comparisons to prior jailbreak techniques, statistical significance testing for the 84.2% ASR, data exclusion criteria, or ablation studies isolating the contribution of each component (Visual-Trajectory Mapping, Risk Discriminator, Dual-Path Verification). These omissions limit assessment of whether the framework advances the state of the art.
minor comments (2)
- [Abstract and Conclusion] The abstract states that 'robust defense mechanisms can be constructed based on JailWAM' but the main text provides only high-level mention without concrete defense implementations, evaluations, or quantitative results; this should be expanded or the claim tempered.
- [Figures] Figure captions and diagrams illustrating the Dual-Path Verification Strategy and Visual-Trajectory Mapping would benefit from additional labels and step-by-step annotations to improve clarity for readers unfamiliar with the WAM architectures.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. The comments highlight important aspects of simulation fidelity, framework validation, and empirical rigor that we will address in the revision. We provide point-by-point responses below.
read point-by-point responses
-
Referee: Experiments section (RoboTwin evaluation): The headline 84.2% attack success rate on LingBot-VA is obtained exclusively inside the RoboTwin simulator via Visual-Trajectory Mapping and Dual-Path Verification. The central claim that JailWAM 'efficiently exposes physical vulnerabilities' therefore depends on the untested assumption that simulation trajectories correspond to equivalent real-world unsafe physical interactions. No real-robot deployment, sim-to-real transfer experiments, or analysis of dynamics mismatch, sensor noise, and contact modeling gaps is described, which is load-bearing for the physical safety conclusions.
Authors: We agree that all reported results are obtained in the RoboTwin simulator and that no real-robot or sim-to-real experiments are included. The simulator provides a controlled environment for closed-loop physical simulation, but we acknowledge that dynamics mismatch, sensor noise, and contact modeling differences remain untested. We will revise the abstract, introduction, and conclusion to qualify claims about 'physical vulnerabilities' as referring to simulated environments. A new limitations subsection will explicitly discuss these gaps and frame real-world transfer as important future work. This revision will ensure the safety conclusions are appropriately scoped to the simulation setting. revision: partial
-
Referee: Three-Level Safety Classification Framework (Section 3): The framework is presented as a systematic quantifier of safety for robotic motions, yet the manuscript supplies no details on its validation against real-world harm (e.g., calibration to physical injury metrics, inter-annotator agreement, or comparison with established robotics safety standards). This directly affects the interpretability and reliability of the reported attack success rate.
Authors: The Three-Level Safety Classification Framework categorizes motions according to observable kinematic and interaction properties (velocity thresholds, proximity to humans/objects, and potential for collision or damage). We did not provide calibration to physical injury metrics or inter-annotator studies in the submitted version. We will expand Section 3 with a more detailed rationale, explicit mapping to ISO 10218 and related robotics safety guidelines, and a clear statement that the levels serve as an initial proxy for evaluation rather than a fully validated harm metric. We will also note the requirement for future empirical calibration as a limitation. revision: partial
-
Referee: Evaluation on JailWAM-Bench: The results lack explicit baseline comparisons to prior jailbreak techniques, statistical significance testing for the 84.2% ASR, data exclusion criteria, or ablation studies isolating the contribution of each component (Visual-Trajectory Mapping, Risk Discriminator, Dual-Path Verification). These omissions limit assessment of whether the framework advances the state of the art.
Authors: We accept that the current evaluation section would benefit from these additions. In the revised manuscript we will: (i) adapt and compare against representative prior jailbreak approaches from the LLM and vision-language literature where applicable to the WAM setting; (ii) report statistical significance and confidence intervals for the 84.2% ASR; (iii) document the data exclusion criteria used when constructing JailWAM-Bench; and (iv) present ablation results that isolate the contribution of Visual-Trajectory Mapping, the Risk Discriminator, and the Dual-Path Verification Strategy. These changes will allow readers to better gauge the framework's incremental contribution. revision: yes
- Real-robot deployment, sim-to-real transfer experiments, and analysis of dynamics mismatch/sensor noise/contact modeling gaps (first major comment).
- Empirical validation of the Three-Level Safety Classification Framework against real-world physical injury metrics, inter-annotator agreement, or direct comparison with established safety standards (second major comment).
Circularity Check
No circularity: empirical measurement of attack success rate in simulation
full rationale
The paper is an empirical contribution that defines a Three-Level Safety Classification Framework, proposes JailWAM components (Visual-Trajectory Mapping, Risk Discriminator, Dual-Path Verification), constructs JailWAM-Bench, and reports a directly measured 84.2% attack success rate inside the RoboTwin simulator on LingBot-VA. No equations, derivations, or first-principles results are presented that reduce to their own inputs by construction. The success rate is obtained from simulation runs rather than from any fitted parameter renamed as a prediction, self-referential definition, or load-bearing self-citation chain. The central claim therefore remains an independent experimental observation within the stated simulation environment.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We define the Three-Level Safety Classification Framework to systematically quantify the safety of robotic arm motions... Visual-Trajectory Mapping... Risk Discriminator... Dual-Path Verification Strategy
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Experiments in RoboTwin simulation environment demonstrate... 84.2% attack success rate
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Shuai Bai, Yuxuan Cai, Ruizhe Chen, Keqin Chen, Xionghui Chen, Zesen Cheng, Lianghao Deng, Wei Ding, Chang Gao, Chunjiang Ge, et al . 2025. Qwen3-vl technical report.arXiv preprint arXiv:2511.21631(2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[2]
Hongzhe Bi, Hengkai Tan, Shenghao Xie, Zeyuan Wang, Shuhe Huang, Haitian Liu, Ruowen Zhao, Yao Feng, Chendong Xiang, Yinze Rong, et al. 2025. Motus: A unified latent action world model.arXiv preprint arXiv:2512.13030(2025)
work page internal anchor Pith review arXiv 2025
-
[3]
Tianxing Chen, Zanxin Chen, Baijun Chen, Zijian Cai, Yibin Liu, Zixuan Li, Qiwei Liang, Xianliang Lin, Yiheng Ge, Zhenyu Gu, et al. 2025. Robotwin 2.0: A scalable data generator and benchmark with strong domain randomization for robust bimanual robotic manipulation.arXiv preprint arXiv:2506.18088(2025)
work page internal anchor Pith review arXiv 2025
- [4]
-
[5]
Yichen Gong, Delong Ran, Jinyuan Liu, Conglei Wang, Tianshuo Cong, Anyu Wang, Sisi Duan, and Xiaoyun Wang. 2025. Figstep: Jailbreaking large vision- language models via typographic visual prompts. InProceedings of the AAAI Conference on Artificial Intelligence, Vol. 39. 23951–23959
2025
-
[6]
Yucheng Hu, Yanjiang Guo, Pengchao Wang, Xiaoyu Chen, Yen-Jen Wang, Jianke Zhang, Koushil Sreenath, Chaochao Lu, and Jianyu Chen. 2024. Video prediction policy: A generalist robot policy with predictive visual representations.arXiv preprint arXiv:2412.14803(2024)
work page internal anchor Pith review arXiv 2024
- [7]
-
[8]
Moo Jin Kim, Yihuai Gao, Tsung-Yi Lin, Yen-Chen Lin, Yunhao Ge, Grace Lam, Percy Liang, Shuran Song, Ming-Yu Liu, Chelsea Finn, et al. 2026. Cosmos policy: Fine-tuning video models for visuomotor control and planning.arXiv preprint arXiv:2601.16163(2026)
work page internal anchor Pith review arXiv 2026
- [9]
-
[10]
Lin Li, Qihang Zhang, Yiming Luo, Shuai Yang, Ruilin Wang, Fei Han, Mingrui Yu, Zelin Gao, Nan Xue, Xing Zhu, et al. 2026. Causal World Modeling for Robot Control.arXiv preprint arXiv:2601.21998(2026)
work page internal anchor Pith review arXiv 2026
-
[11]
Xuanlin Li, Kyle Hsu, Jiayuan Gu, Karl Pertsch, Oier Mees, Homer Rich Walke, Chuyuan Fu, Ishikaa Lunawat, Isabel Sieh, Sean Kirmani, et al . 2024. Eval- uating real-world robot manipulation policies in simulation.arXiv preprint arXiv:2405.05941(2024)
work page internal anchor Pith review arXiv 2024
- [12]
-
[13]
Bo Liu, Yifeng Zhu, Chongkai Gao, Yihao Feng, Qiang Liu, Yuke Zhu, and Peter Stone. 2023. Libero: Benchmarking knowledge transfer for lifelong robot learning. Advances in Neural Information Processing Systems36 (2023), 44776–44791
2023
- [14]
-
[15]
Jiayang Liu, Siyuan Liang, Shiqian Zhao, Rongcheng Tu, Wenbo Zhou, Xiaochun Cao, Dacheng Tao, and Siew Kei Lam. 2025. Jailbreaking the text-to-video generative models.arXiv e-prints(2025), arXiv–2505
2025
- [16]
-
[17]
Yibo Miao, Yifan Zhu, Lijia Yu, Jun Zhu, Xiao-Shan Gao, and Yinpeng Dong
-
[18]
Advances in Neural Information Processing Systems37 (2024), 63858–63872
T2vsafetybench: Evaluating the safety of text-to-video generative models. Advances in Neural Information Processing Systems37 (2024), 63858–63872
2024
- [19]
-
[20]
Physical Intelligence, Kevin Black, Noah Brown, James Darpinian, Karan Dha- balia, Danny Driess, Adnan Esmail, Michael Equi, Chelsea Finn, Niccolo Fusai, et al. 2025. 𝜋0.5: A Vision-Language-Action Model with Open-World Generaliza- tion.arXiv preprint arXiv:2504.16054(2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[21]
Xiangyu Qi, Kaixuan Huang, Ashwinee Panda, Peter Henderson, Mengdi Wang, and Prateek Mittal. 2024. Visual adversarial examples jailbreak aligned large language models. InProceedings of the AAAI conference on artificial intelligence, Vol. 38. 21527–21536
2024
-
[22]
Xijia Tao, Shuai Zhong, Lei Li, Qi Liu, and Lingpeng Kong. 2025. Imgtrojan: Jailbreaking vision-language models with one image. InProceedings of the 2025 Conference of the Nations of the Americas Chapter of the Association for Com- putational Linguistics: Human Language Technologies (Volume 1: Long Papers). 7048–7063
2025
- [23]
-
[24]
Taowen Wang, Cheng Han, James Liang, Wenhao Yang, Dongfang Liu, Luna Xinyu Zhang, Qifan Wang, Jiebo Luo, and Ruixiang Tang. 2025. Exploring the adversarial vulnerabilities of vision-language-action models in robotics. In Proceedings of the IEEE/CVF International Conference on Computer Vision. 6948– 6958
2025
- [25]
-
[26]
Zonghao Ying, Aishan Liu, Tianyuan Zhang, Zhengmin Yu, Siyuan Liang, Xiang- long Liu, and Dacheng Tao. 2025. Jailbreak vision language models via bi-modal adversarial prompt.IEEE Transactions on Information Forensics and Security (2025)
2025
-
[27]
Hangtao Zhang, Chenyu Zhu, Xianlong Wang, Ziqi Zhou, Changgan Yin, Minghui Li, Lulu Xue, Yichen Wang, Shengshan Hu, Aishan Liu, et al . 2025. Badrobot: Jailbreaking embodied LLM agents in the physical world. InThe Thir- teenth International Conference on Learning Representations
2025
-
[28]
Jiaming Zhang, Junhong Ye, Xingjun Ma, Yige Li, Yunfan Yang, Yunhao Chen, Jitao Sang, and Dit-Yan Yeung. 2025. Anyattack: Towards large-scale self- supervised adversarial attacks on vision-language models. InProceedings of the Computer Vision and Pattern Recognition Conference. 19900–19909
2025
- [29]
-
[30]
Andy Zou, Zifan Wang, Nicholas Carlini, Milad Nasr, J Zico Kolter, and Matt Fredrikson. 2023. Universal and transferable adversarial attacks on aligned language models.arXiv preprint arXiv:2307.15043(2023)
work page internal anchor Pith review Pith/arXiv arXiv 2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.