Recognition: 2 theorem links
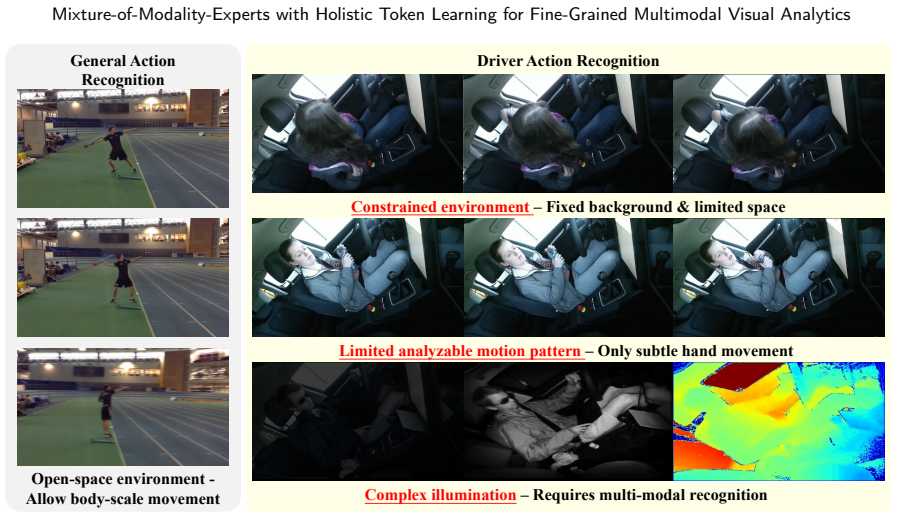
· Lean TheoremMixture-of-Modality-Experts with Holistic Token Learning for Fine-Grained Multimodal Visual Analytics in Driver Action Recognition
Pith reviewed 2026-05-10 18:35 UTC · model grok-4.3
The pith
A mixture of modality-specific experts with shared token learning adapts fusion dynamically and outperforms fixed multimodal baselines on driver action recognition.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors claim that their Mixture-of-Modality-Experts (MoME) framework, together with the Holistic Token Learning (HTL) strategy, forms a knowledge-centric system in which modality-specific experts collaborate adaptively; HTL refines intra-expert representations and enables inter-expert transfer through class tokens and spatio-temporal tokens, yielding superior results on driver action recognition benchmarks relative to representative single-modal and multimodal baselines while also improving interpretability of subtle action cues.
What carries the argument
Mixture-of-Modality-Experts (MoME) that routes inputs to specialized per-modality experts for adaptive collaboration, augmented by Holistic Token Learning (HTL) that shares class tokens for global context and spatio-temporal tokens for local refinement to transfer knowledge across experts.
If this is right
- Adaptive expert collaboration reduces ambiguity when modality reliability fluctuates during inference.
- Class and spatio-temporal tokens jointly refine features within each expert and transfer knowledge between experts.
- The resulting model captures finer multimodal action cues than fixed-fusion alternatives on the evaluated benchmark.
- Improved token-based interpretability reveals which modality experts contribute to each decision.
Where Pith is reading between the lines
- The same routing-plus-token design could be tested on other variable-quality multimodal tasks such as egocentric video understanding.
- Adding new sensor types would require only training an additional expert rather than redesigning the entire fusion stage.
- Real-time monitoring of expert activation patterns might serve as an early indicator of impending modality failure in deployed systems.
Load-bearing premise
The chosen public benchmark dataset adequately represents the range of modality reliability changes and fine-grained action details that occur in actual driving environments.
What would settle it
A controlled experiment on a dataset in which one input modality is systematically degraded or removed while others remain intact, showing no accuracy gain or a performance drop relative to fixed-fusion baselines, would undermine the claimed benefit of adaptive expert collaboration.
Figures


read the original abstract
Robust multimodal visual analytics remains challenging when heterogeneous modalities provide complementary but input-dependent evidence for decision-making.Existing multimodal learning methods mainly rely on fixed fusion modules or predefined cross-modal interactions, which are often insufficient to adapt to changing modality reliability and to capture fine-grained action cues. To address this issue, we propose a Mixture-of-Modality-Experts (MoME) framework with a Holistic Token Learning (HTL) strategy. MoME enables adaptive collaboration among modality-specific experts, while HTL improves both intra-expert refinement and inter-expert knowledge transfer through class tokens and spatio-temporal tokens. In this way, our method forms a knowledge-centric multimodal learning framework that improves expert specialization while reducing ambiguity in multimodal fusion.We validate the proposed framework on driver action recognition as a representative multimodal understanding taskThe experimental results on the public benchmark show that the proposed MoME framework and the HTL strategy jointly outperform representative single-modal and multimodal baselines. Additional ablation, validation, and visualization results further verify that the proposed HTL strategy improves subtle multimodal understanding and offers better interpretability.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a Mixture-of-Modality-Experts (MoME) framework with a Holistic Token Learning (HTL) strategy for fine-grained multimodal visual analytics, applied to driver action recognition. MoME enables adaptive collaboration among modality-specific experts to handle varying reliability, while HTL uses class tokens and spatio-temporal tokens to improve intra-expert refinement and inter-expert knowledge transfer. The central claim is that MoME + HTL jointly outperform single-modal and multimodal baselines on a public benchmark, supported by ablations, validation, and visualizations demonstrating better subtle understanding and interpretability.
Significance. If the reported outperformance is robustly validated, the approach could advance adaptive multimodal fusion for tasks with input-dependent evidence, such as autonomous driving analytics. The knowledge-centric design emphasizing expert specialization and token-based transfer is a constructive direction, and the inclusion of ablation studies plus visualizations adds value for interpretability. However, the significance depends on whether the benchmark sufficiently covers real-world modality shifts and fine-grained cues; absent such checks, the practical advance remains provisional.
major comments (1)
- [Experiments and Results] Experiments section: The core claim of joint outperformance on the public driver action recognition benchmark is load-bearing for the paper's contribution. To support the motivating regime of heterogeneous, changing modality reliability and subtle spatio-temporal cues, the manuscript must demonstrate benchmark coverage via targeted analyses (e.g., modality dropout ablations, lighting/sensor degradation tests, or fine-grained class confusion matrices). The abstract and available description provide no such evidence, leaving open whether the dataset distribution matches the intended conditions.
minor comments (1)
- [Abstract] Abstract: The statement that 'the experimental results on the public benchmark show that the proposed MoME framework and the HTL strategy jointly outperform...' lacks any quantitative metrics, dataset identifiers, or statistical details, which reduces immediate readability and assessment of the claims.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address the major comment below, providing clarifications and committing to enhancements where appropriate to strengthen the experimental support for our claims.
read point-by-point responses
-
Referee: [Experiments and Results] Experiments section: The core claim of joint outperformance on the public driver action recognition benchmark is load-bearing for the paper's contribution. To support the motivating regime of heterogeneous, changing modality reliability and subtle spatio-temporal cues, the manuscript must demonstrate benchmark coverage via targeted analyses (e.g., modality dropout ablations, lighting/sensor degradation tests, or fine-grained class confusion matrices). The abstract and available description provide no such evidence, leaving open whether the dataset distribution matches the intended conditions.
Authors: We appreciate the referee's point that targeted analyses would more explicitly validate performance under varying modality reliability and fine-grained cues. Our experiments already demonstrate consistent outperformance of MoME+HTL over single-modal and multimodal baselines on the public benchmark, with ablations on HTL components, validation studies, and visualizations confirming improved subtle understanding and interpretability. These results, combined with the adaptive expert collaboration design, provide evidence for handling input-dependent evidence. To directly address the concern, we will add modality dropout ablations (as a proxy for reliability shifts) and fine-grained class confusion matrices to the revised experiments section. The benchmark does not include explicit lighting or sensor degradation annotations, so we will clarify the use of dropout as a relevant simulation and discuss dataset suitability for the task. revision: yes
Circularity Check
No circularity: empirical performance claims on external benchmarks
full rationale
The paper proposes an architectural framework (MoME with HTL) for multimodal fusion and validates it through standard empirical comparisons on a public driver action recognition benchmark. No derivation chain, first-principles predictions, or fitted parameters are claimed; the central result is simply that the method outperforms listed baselines in experiments. This is self-contained against external data with no self-referential reductions, self-citation load-bearing steps, or ansatz smuggling detectable from the provided text.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Mixture-of-Modality-Experts (MoME) ... dynamic gating mechanism ... Holistic Token Learning (HTL) ... intra-expert self-guidance ... inter-expert mutual guidance ... L_intra with KL on class and spatio-temporal tokens, L_inter with MSE on class tokens
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
no mention of recognition cost, golden ratio, 8-tick period, or distinction-forced constants
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
write newline
" write newline "" before.all 'output.state := FUNCTION n.dashify 't := "" t empty not t #1 #1 substring "-" = t #1 #2 substring "--" = not "--" * t #2 global.max substring 't := t #1 #1 substring "-" = "-" * t #2 global.max substring 't := while if t #1 #1 substring * t #2 global.max substring 't := if while FUNCTION word.in bbl.in ":" * " " * FUNCTION f...
-
[2]
, author Zisserman, A
author Carreira, J. , author Zisserman, A. , year 2017 . title Quo vadis, action recognition? a new model and the kinetics dataset , in: booktitle proceedings of the IEEE Conference on Computer Vision and Pattern Recognition , pp. pages 6299--6308
2017
-
[3]
, author Wu, Y
author Chung, J. , author Wu, Y. , author Russakovsky, O. , year 2022 . title Enabling detailed action recognition evaluation through video dataset augmentation . journal Advances in Neural Information Processing Systems volume 35 , pages 39020--39033
2022
-
[4]
, author Wang, P
author Gong, P. , author Wang, P. , author Zhou, Y. , author Wen, X. , author Zhang, D. , year 2024 . title Tfac-net: A temporal-frequential attentional convolutional network for driver drowsiness recognition with single-channel eeg . journal IEEE Transactions on Intelligent Transportation Systems
2024
-
[5]
, author Zhang, X
author He, K. , author Zhang, X. , author Ren, S. , author Sun, J. , year 2016 . title Deep residual learning for image recognition , in: booktitle Proceedings of the IEEE conference on computer vision and pattern recognition , pp. pages 770--778
2016
-
[6]
, author Jordan, M.I
author Jacobs, R.A. , author Jordan, M.I. , author Nowlan, S.J. , author Hinton, G.E. , year 1991 . title Adaptive mixtures of local experts . journal Neural computation volume 3 , pages 79--87
1991
-
[7]
, author Hou, Q
author Jiang, Z.H. , author Hou, Q. , author Yuan, L. , author Zhou, D. , author Shi, Y. , author Jin, X. , author Wang, A. , author Feng, J. , year 2021 . title All tokens matter: Token labeling for training better vision transformers . journal Advances in Neural Information Processing Systems volume 34 , pages 18590--18602
2021
-
[8]
The Kinetics Human Action Video Dataset
author Kay, W. , author Carreira, J. , author Simonyan, K. , author Zhang, B. , author Hillier, C. , author Vijayanarasimhan, S. , author Viola, F. , author Green, T. , author Back, T. , author Natsev, P. , et al., year 2017 . title The kinetics human action video dataset . journal arXiv preprint arXiv:1705.06950
work page internal anchor Pith review arXiv 2017
-
[9]
, author Li, W
author Kuang, J. , author Li, W. , author Li, F. , author Zhang, J. , author Wu, Z. , year 2023 . title Mifi: Multi-camera feature integration for robust 3d distracted driver activity recognition . journal IEEE Transactions on Intelligent Transportation Systems
2023
-
[10]
, author Xie, S
author Lee, C.Y. , author Xie, S. , author Gallagher, P. , author Zhang, Z. , author Tu, Z. , year 2015 . title Deeply-supervised nets , in: booktitle Artificial intelligence and statistics , organization Pmlr . pp. pages 562--570
2015
-
[11]
, author Wang, Y
author Li, K. , author Wang, Y. , author He, Y. , author Li, Y. , author Wang, Y. , author Wang, L. , author Qiao, Y. , year 2023 a. title Uniformerv2: Unlocking the potential of image vits for video understanding , in: booktitle Proceedings of the IEEE/CVF International Conference on Computer Vision , pp. pages 1632--1643
2023
-
[12]
, author Wang, Y
author Li, K. , author Wang, Y. , author Zhang, J. , author Gao, P. , author Song, G. , author Liu, Y. , author Li, H. , author Qiao, Y. , year 2023 b. title Uniformer: Unifying convolution and self-attention for visual recognition . journal IEEE Transactions on Pattern Analysis and Machine Intelligence volume 45 , pages 12581--12600
2023
-
[13]
, author Lee, P.H.Y
author Lin, D. , author Lee, P.H.Y. , author Li, Y. , author Wang, R. , author Yap, K.H. , author Li, B. , author Ngim, Y.S. , year 2024 . title Multi-modality action recognition based on dual feature shift in vehicle cabin monitoring , in: booktitle ICASSP 2024-2024 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP) , organ...
2024
-
[14]
, author Gan, C
author Lin, J. , author Gan, C. , author Han, S. , year 2019 . title Tsm: Temporal shift module for efficient video understanding , in: booktitle Proceedings of the IEEE/CVF international conference on computer vision , pp. pages 7083--7093
2019
-
[15]
author Liu, T. , author Lu, Y. , author Zhang, L. , author Cai, C. , author Gao, J. , author Wang, Y. , author Yap, K.H. , author Chau, L.P. , year 2026 . title Accelerating diffusion-based video editing via heterogeneous caching: Beyond full computing at sampled denoising timestep . journal arXiv preprint arXiv:2603.24260
-
[16]
, author Sugano, Y
author Liu, T. , author Sugano, Y. , year 2022 . title Interactive machine learning on edge devices with user-in-the-loop sample recommendation . journal IEEE Access volume 10 , pages 107346--107360
2022
-
[17]
, author Wu, K
author Liu, T. , author Wu, K. , author Cai, C. , author Wang, Y. , author Yap, K.H. , author Chau, L.P. , year 2025 . title Towards blind bitstream-corrupted video recovery: A visual foundation model-driven framework , in: booktitle Proceedings of the 33rd ACM International Conference on Multimedia , pp. pages 7949--7958
2025
-
[18]
, author Wu, K
author Liu, T. , author Wu, K. , author Wang, Y. , author Liu, W. , author Yap, K.H. , author Chau, L.P. , year 2023 . title Bitstream-corrupted video recovery: A novel benchmark dataset and method . journal Advances in Neural Information Processing Systems volume 36 , pages 68420--68433
2023
-
[19]
Decoupled Weight Decay Regularization
author Loshchilov, I. , year 2017 . title Decoupled weight decay regularization . journal arXiv preprint arXiv:1711.05101
work page internal anchor Pith review Pith/arXiv arXiv 2017
-
[20]
SGDR: Stochastic Gradient Descent with Warm Restarts
author Loshchilov, I. , author Hutter, F. , year 2016 . title Sgdr: Stochastic gradient descent with warm restarts . journal arXiv preprint arXiv:1608.03983
work page internal anchor Pith review arXiv 2016
-
[21]
author Lv, C. , author Nian, J. , author Xu, Y. , author Song, B. , year 2022 . title Compact vehicle driver fatigue recognition technology based on eeg signal . journal IEEE Transactions on Intelligent Transportation Systems volume 23 , pages 19753--19759 . :10.1109/TITS.2021.3119354
-
[22]
, author Chau, L.P
author Ma, X. , author Chau, L.P. , author Yap, K.H. , year 2017 . title Depth video-based two-stream convolutional neural networks for driver fatigue detection , in: booktitle 2017 International Conference on Orange Technologies (ICOT) , organization IEEE . pp. pages 155--158
2017
-
[23]
, author Chau, L.P
author Ma, X. , author Chau, L.P. , author Yap, K.H. , author Ping, G. , year 2019 . title Convolutional three-stream network fusion for driver fatigue detection from infrared videos , in: booktitle 2019 IEEE International Symposium on Circuits and Systems (ISCAS) , organization IEEE . pp. pages 1--5
2019
-
[24]
, author Roitberg, A
author Martin, M. , author Roitberg, A. , author Haurilet, M. , author Horne, M. , author Rei , S. , author Voit, M. , author Stiefelhagen, R. , year 2019 . title Drive&act: A multi-modal dataset for fine-grained driver behavior recognition in autonomous vehicles , in: booktitle Proceedings of the IEEE/CVF International Conference on Computer Vision , pp....
2019
-
[25]
, author Roitberg, A
author Peng, K. , author Roitberg, A. , author Yang, K. , author Zhang, J. , author Stiefelhagen, R. , year 2022 . title Transdarc: Transformer-based driver activity recognition with latent space feature calibration , in: booktitle 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , organization IEEE . pp. pages 278--285
2022
-
[26]
, author Yao, T
author Qiu, Z. , author Yao, T. , author Mei, T. , year 2017 . title Learning spatio-temporal representation with pseudo-3d residual networks , in: booktitle proceedings of the IEEE International Conference on Computer Vision , pp. pages 5533--5541
2017
-
[27]
, author Peng, K
author Roitberg, A. , author Peng, K. , author Marinov, Z. , author Seibold, C. , author Schneider, D. , author Stiefelhagen, R. , year 2022 . title A comparative analysis of decision-level fusion for multimodal driver behaviour understanding , in: booktitle 2022 IEEE intelligent vehicles symposium (IV) , organization IEEE . pp. pages 1438--1444
2022
-
[28]
, author Naseer, M
author Sultana, M. , author Naseer, M. , author Khan, M.H. , author Khan, S. , author Khan, F.S. , year 2022 . title Self-distilled vision transformer for domain generalization , in: booktitle Proceedings of the Asian conference on computer vision , pp. pages 3068--3085
2022
-
[29]
, author Ni, G
author Tan, M. , author Ni, G. , author Liu, X. , author Zhang, S. , author Wu, X. , author Wang, Y. , author Zeng, R. , year 2021 . title Bidirectional posture-appearance interaction network for driver behavior recognition . journal IEEE Transactions on Intelligent Transportation Systems volume 23 , pages 13242--13254
2021
-
[30]
, author Bourdev, L
author Tran, D. , author Bourdev, L. , author Fergus, R. , author Torresani, L. , author Paluri, M. , year 2015 . title Learning spatiotemporal features with 3d convolutional networks , in: booktitle Proceedings of the IEEE international conference on computer vision , pp. pages 4489--4497
2015
-
[31]
author Wang, R. , author Cai, C. , author Wang, W. , author Gao, J. , author Lin, D. , author Liu, W. , author Yap, K.H. , year 2024 a. title Cm2-net: Continual cross-modal mapping network for driver action recognition . journal arXiv preprint arXiv:2406.11340
-
[32]
author Wang, R. , author Wang, W. , author Gao, J. , author Lin, D. , author Yap, K.H. , author Li, B. , year 2024 b. title Multifuser: Multimodal fusion transformer for enhanced driver action recognition . journal arXiv preprint arXiv:2408.01766
-
[33]
, author Behera, A
author Wharton, Z. , author Behera, A. , author Liu, Y. , author Bessis, N. , year 2021 . title Coarse temporal attention network (cta-net) for driver's activity recognition , in: booktitle Proceedings of the IEEE/CVF winter conference on applications of computer vision , pp. pages 1279--1289
2021
-
[34]
, author Zhang, Y
author Xie, Z. , author Zhang, Y. , author Zhuang, C. , author Shi, Q. , author Liu, Z. , author Gu, J. , author Zhang, G. , year 2024 . title Mode: A mixture-of-experts model with mutual distillation among the experts , in: booktitle Proceedings of the AAAI Conference on Artificial Intelligence , pp. pages 16067--16075
2024
-
[35]
, author Liu, L
author Yang, H. , author Liu, L. , author Min, W. , author Yang, X. , author Xiong, X. , year 2020 . title Driver yawning detection based on subtle facial action recognition . journal IEEE Transactions on Multimedia volume 23 , pages 572--583
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.