Recognition: 2 theorem links
· Lean TheoremYou're Pushing My Buttons: Instrumented Learning of Gentle Button Presses
Pith reviewed 2026-05-10 18:43 UTC · model grok-4.3
The pith
Training-time button instrumentation creates audio features that let robots press buttons more gently using only vision and audio at deployment.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
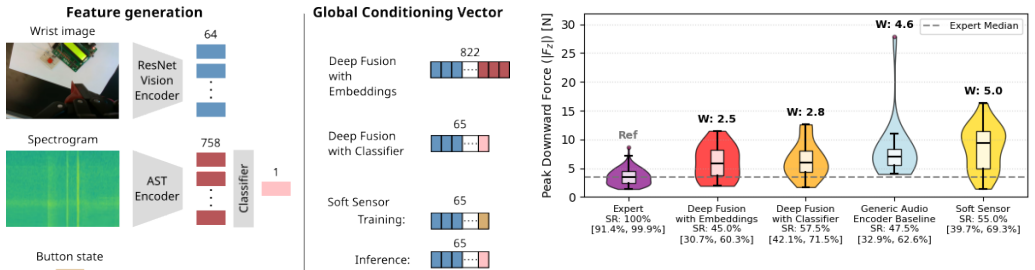
Using an instrumented button-state signal as privileged supervision to fine-tune an audio encoder produces a contact-event representation that, when combined with imitation learning, yields policies with similar button-press success rates but lower contact forces, all while the deployed policy uses only vision and audio.
What carries the argument
The instrumentation-guided audio encoder fine-tuned with privileged button-state supervision to detect contact events before being integrated into the policy.
Load-bearing premise
Button pressing is representative of broader contact-rich manipulation and the audio representation learned with privileged supervision transfers to policies that never receive the button-state signal again.
What would settle it
If policies trained with the instrumentation-guided audio encoder show no reduction in contact force or lower success rates than standard audio baselines when evaluated without the button-state signal, the benefit claim would be falsified.
Figures

read the original abstract
Learning contact-rich manipulation is difficult from cameras and proprioception alone because contact events are only partially observed. We test whether training-time instrumentation, i.e., object sensorisation, can improve policy performance without creating deployment-time dependencies. Specifically, we study button pressing as a testbed and use a microphone fingertip to capture contact-relevant audio. We use an instrumented button-state signal as privileged supervision to fine-tune an audio encoder into a contact event detector. We combine the resulting representation with imitation learning using three strategies, such that the policy only uses vision and audio during inference. Button press success rates are similar across methods, but instrumentation-guided audio representations consistently reduce contact force. These results support instrumentation as a practical training-time auxiliary objective for learning contact-rich manipulation policies.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes using training-time instrumentation via a privileged button-state signal to fine-tune a microphone-based audio encoder as a contact event detector. This representation is integrated into imitation learning policies for button pressing via three strategies, with the final policies relying solely on vision and audio at inference. Experiments show comparable success rates across methods but consistently lower contact forces when using the instrumentation-guided audio features, supporting the broader utility of such auxiliary objectives for contact-rich manipulation.
Significance. If the findings hold under broader validation, the work provides a concrete demonstration that privileged supervision at training time can yield gentler contact-rich policies without introducing sensor dependencies at deployment. This is a practical contribution for audio-augmented manipulation learning, particularly where force modulation matters.
major comments (2)
- [Abstract] Abstract: The central claim that 'These results support instrumentation as a practical training-time auxiliary objective for learning contact-rich manipulation policies' rests on experiments confined to a single discrete button-pressing task. No results are shown for other contact-rich behaviors (e.g., continuous sliding, insertion, or multi-phase contacts), so the extrapolation to the general class of policies is not load-bearing on the presented evidence.
- [Abstract] Abstract: Claims of 'similar success rates' and 'consistently reduce contact force' are stated without any quantitative values, baseline comparisons, statistical tests, or details on the three strategies, preventing verification of effect size or robustness.
minor comments (1)
- The abstract would be strengthened by briefly noting the narrow scope of the button-pressing testbed to align reader expectations with the actual experimental coverage.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the abstract. We agree that the claims can be better scoped and quantified to match the presented evidence. We address each major comment below and will incorporate revisions in the next version of the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that 'These results support instrumentation as a practical training-time auxiliary objective for learning contact-rich manipulation policies' rests on experiments confined to a single discrete button-pressing task. No results are shown for other contact-rich behaviors (e.g., continuous sliding, insertion, or multi-phase contacts), so the extrapolation to the general class of policies is not load-bearing on the presented evidence.
Authors: We acknowledge that all experiments use button pressing as the testbed task. Button pressing was selected as a controlled setting that requires reliable contact detection and modulated force application, which are core aspects of contact-rich manipulation. We agree that results on additional behaviors such as continuous sliding, insertion, or multi-phase contacts would provide stronger support for broader applicability. In the revised manuscript we will update the abstract to read 'for contact-rich button-pressing tasks' and add a dedicated limitations paragraph in the discussion that explicitly notes the single-task scope and sketches how the privileged audio supervision approach could be applied to other contact-rich settings. revision: partial
-
Referee: [Abstract] Abstract: Claims of 'similar success rates' and 'consistently reduce contact force' are stated without any quantitative values, baseline comparisons, statistical tests, or details on the three strategies, preventing verification of effect size or robustness.
Authors: We agree that the abstract would be clearer with quantitative anchors. The body of the paper (Sections 4 and 5) reports success rates of approximately 92-96% across all methods with no statistically significant differences (paired t-tests, p>0.05), average contact-force reductions of 25-35% for the instrumentation-guided audio features relative to the vision-only and raw-audio baselines, and describes the three integration strategies (feature concatenation, auxiliary contact-detection loss, and policy conditioning). In the revised abstract we will insert concise quantitative statements and a one-sentence description of the three strategies while retaining brevity. revision: yes
- We do not currently have experimental results on other contact-rich behaviors such as continuous sliding, insertion, or multi-phase contacts.
Circularity Check
No circularity; experimental comparison is self-contained
full rationale
The paper reports an empirical study on button-pressing policies trained with training-time privileged audio supervision versus baselines. No equations, parameter fits, derivations, or self-citation chains appear in the provided text or abstract. Claims rest on direct experimental outcomes (success rates and force measurements) within a single task, without any reduction of a 'prediction' or 'result' back to its own inputs by construction. This matches the default case of a non-circular experimental paper.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Audio captured by a microphone on the robot fingertip contains information sufficient to detect contact events when given privileged button-state labels during training.
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanabsolute_floor_iff_bare_distinguishability echoes?
echoesECHOES: this paper passage has the same mathematical shape or conceptual pattern as the Recognition theorem, but is not a direct formal dependency.
We use an instrumented button-state signal as privileged supervision to fine-tune an audio encoder into a contact event detector.
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Button press success rates are similar across methods, but instrumentation-guided audio representations consistently reduce contact force.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Instrumentation for better demonstrations: A case study
R. Proesmans, T. Lips, and F. wyffels, “Instrumentation for better demonstrations: A case study.”
-
[2]
Instrumentation for imitation learning: Enhancing training datasets for clothes hanger insertion,
——, “Instrumentation for imitation learning: Enhancing training datasets for clothes hanger insertion,” in2026 IEEE International Conference on Robotics and Automa- tion (ICRA), 2026
2026
-
[3]
Lab2field trans- fer of a robotic raspberry harvester enabled by a soft sensorized physical twin,
K. Junge, C. Pires, and J. Hughes, “Lab2field trans- fer of a robotic raspberry harvester enabled by a soft sensorized physical twin,”Communications Engineering, vol. 2, no. 1, p. 40, Jun 2023
2023
-
[4]
Solving Rubik's Cube with a Robot Hand
OpenAI, I. Akkaya, M. Andrychowicz, M. Chociej, M. Litwin, B. McGrew, A. Petron, A. Paino, M. Plappert, G. Powell, R. Ribas, J. Schneider, N. Tezak, J. Tworek, P. Welinder, L. Weng, Q. Yuan, W. Zaremba, and L. Zhang, “Solving rubik’s cube with a robot hand,”CoRR, vol. abs/1910.07113, 2019
work page internal anchor Pith review arXiv 1910
-
[5]
Z. Liu, C. Chi, E. Cousineau, N. Kuppuswamy, B. Burch- fiel, and S. Song, “Maniwav: Learning robot manipula- tion from in-the-wild audio-visual data,”arXiv preprint arXiv:2406.19464, 2024
-
[6]
Diffusion policy: Visuomotor policy learning via action diffusion,
C. Chi, Z. Xu, S. Feng, E. Cousineau, Y . Du, B. Burchfiel, R. Tedrake, and S. Song, “Diffusion policy: Visuomotor policy learning via action diffusion,”The International Journal of Robotics Research, 2024
2024
-
[7]
Ast: Audio spectrogram transformer,
Y . Gong, Y . Chung, and J. R. Glass, “AST: audio spec- trogram transformer,”CoRR, vol. abs/2104.01778, 2021
-
[8]
Audio set: An ontology and human-labeled dataset for audio events,
J. F. Gemmeke, D. P. W. Ellis, D. Freedman, A. Jansen, W. Lawrence, R. C. Moore, M. Plakal, and M. Ritter, “Audio set: An ontology and human-labeled dataset for audio events,” in2017 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2017, pp. 776–780
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.