Recognition: 2 theorem links
· Lean TheoremGS-Surrogate: Deformable Gaussian Splatting for Parameter Space Exploration of Ensemble Simulations
Pith reviewed 2026-05-10 17:52 UTC · model grok-4.3
The pith
Deformable Gaussian splatting separates simulation variations from visualization changes for real-time ensemble exploration.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
GS-Surrogate constructs a canonical Gaussian field as a base 3D representation and adapts it through sequential parameter-conditioned deformations. By separating simulation-related variations from visualization-specific changes, this explicit formulation enables efficient and controllable adaptation to different visualization tasks, such as isosurface extraction and transfer function editing.
What carries the argument
Sequential parameter-conditioned deformations applied to a canonical Gaussian field, which isolate simulation variations from visualization adjustments in an explicit 3D representation.
Load-bearing premise
Sequential deformations conditioned on parameters can accurately separate simulation variations from visualization modifications while keeping fidelity and speed across varied datasets.
What would settle it
A new ensemble dataset where the deformed splats produce visibly incorrect isosurfaces or transfer-function results compared with direct rendering of the original runs at interactive frame rates.
Figures







read the original abstract
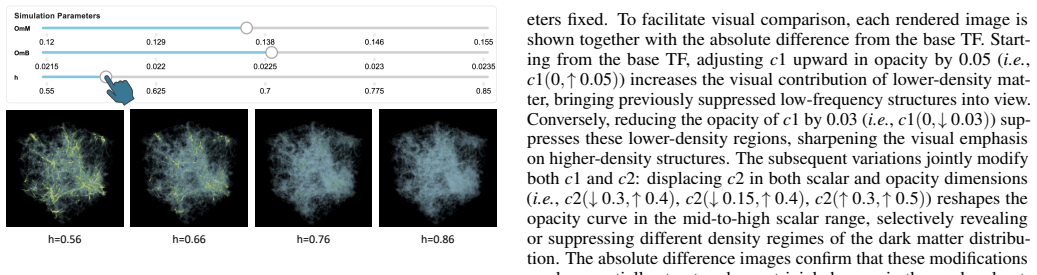
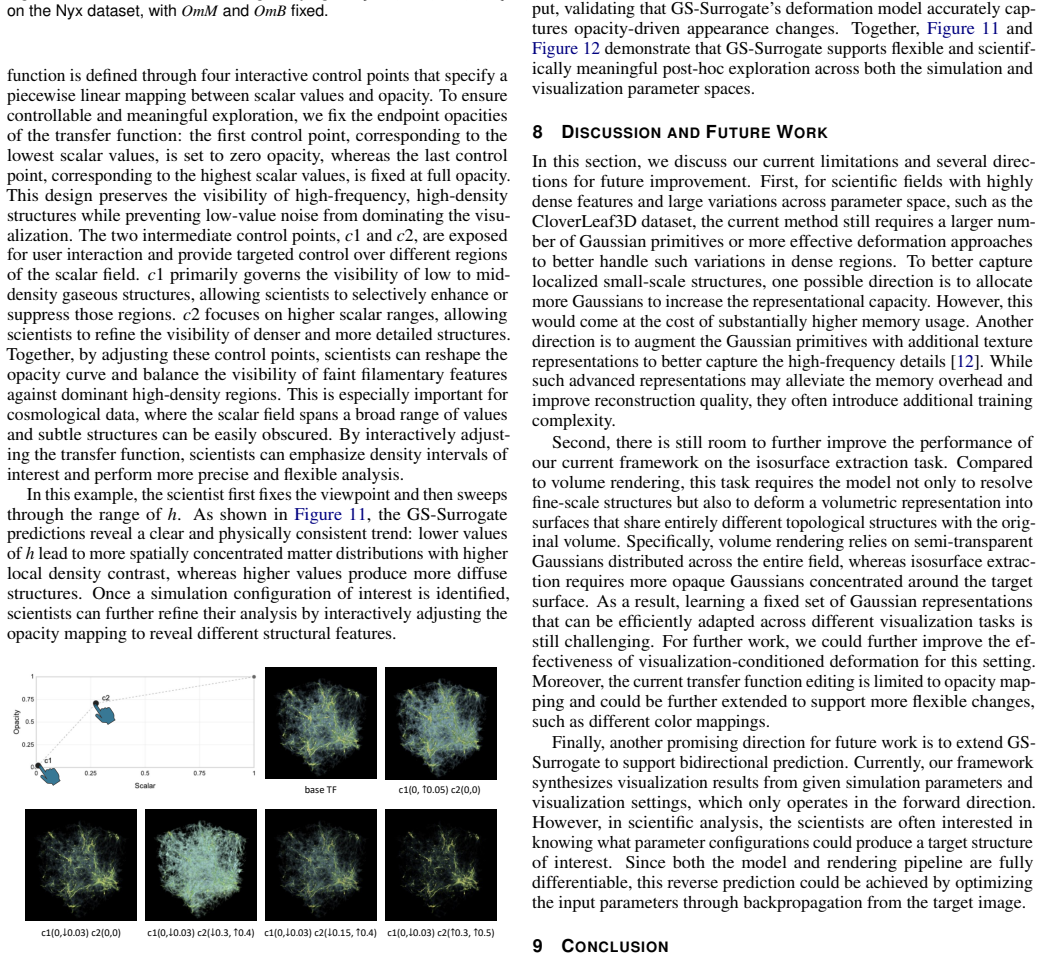
Exploring ensemble simulations is increasingly important across many scientific domains. However, supporting flexible post-hoc exploration remains challenging due to the trade-off between storing the expensive raw data and flexibly adjusting visualization settings. Existing visualization surrogate models have improved this workflow, but they either operate in image space without an explicit 3D representation or rely on neural radiance fields that are computationally expensive for interactive exploration and encode all parameter-driven variations within a single implicit field. In this work, we introduce GS-Surrogate, a deformable Gaussian Splatting-based visualization surrogate for parameter-space exploration. Our method first constructs a canonical Gaussian field as a base 3D representation and adapts it through sequential parameter-conditioned deformations. By separating simulation-related variations from visualization-specific changes, this explicit formulation enables efficient and controllable adaptation to different visualization tasks, such as isosurface extraction and transfer function editing. We evaluate our framework on a range of simulation datasets, demonstrating that GS-Surrogate enables real-time and flexible exploration across both simulation and visualization parameter spaces.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces GS-Surrogate, a deformable Gaussian Splatting surrogate for exploring ensemble simulation parameter spaces. It constructs a canonical Gaussian field as a base 3D representation and adapts it via sequential parameter-conditioned deformations that purportedly separate simulation-related variations from visualization-specific changes (e.g., transfer functions or isosurface extraction). The authors claim this explicit formulation supports efficient, controllable, real-time adaptation across both parameter classes and evaluate the framework on multiple simulation datasets to demonstrate real-time flexible exploration.
Significance. If the separation of parameter classes holds with preserved 3D structure and real-time performance, the approach would offer a concrete advance over image-space surrogates and implicit NeRF-based methods by providing an explicit, editable 3D Gaussian representation suitable for downstream visualization tasks in scientific computing.
major comments (2)
- [Abstract / Evaluation] Abstract and Evaluation section: the central claim of real-time performance and flexible exploration across simulation and visualization parameter spaces is asserted without any reported metrics, baselines, error measures, timing results, or ablation studies. This absence makes it impossible to assess whether the sequential deformations actually achieve the required separation or accuracy.
- [Method] Method section (deformation formulation): the sequential parameter-conditioned deformations applied to the canonical Gaussian field are presented without any explicit disentanglement mechanism (e.g., orthogonality loss, independence regularizer, or staged training). Because deformations are applied in sequence and conditioned on parameters, cross-talk between simulation and visualization edits remains possible and directly undermines the separation claim that is load-bearing for the paper's contribution.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback. The comments highlight important areas for strengthening the quantitative support and methodological clarity of our work. We address each point below and indicate the corresponding revisions.
read point-by-point responses
-
Referee: [Abstract / Evaluation] Abstract and Evaluation section: the central claim of real-time performance and flexible exploration across simulation and visualization parameter spaces is asserted without any reported metrics, baselines, error measures, timing results, or ablation studies. This absence makes it impossible to assess whether the sequential deformations actually achieve the required separation or accuracy.
Authors: We agree that the abstract and evaluation section would be strengthened by explicit quantitative results. The current evaluation provides qualitative demonstrations of real-time exploration and flexible parameter control across multiple datasets, but lacks the requested numerical benchmarks. In the revised manuscript we will update the abstract to reference key results and expand the evaluation section with: (i) timing measurements (e.g., frames per second on target hardware), (ii) reconstruction accuracy metrics such as PSNR and SSIM against ground-truth renderings, (iii) direct comparisons to image-space surrogates and NeRF-based baselines, and (iv) ablation studies that isolate the contribution of sequential deformations to separation accuracy. These additions will enable a rigorous assessment of both performance and the claimed separation. revision: yes
-
Referee: [Method] Method section (deformation formulation): the sequential parameter-conditioned deformations applied to the canonical Gaussian field are presented without any explicit disentanglement mechanism (e.g., orthogonality loss, independence regularizer, or staged training). Because deformations are applied in sequence and conditioned on parameters, cross-talk between simulation and visualization edits remains possible and directly undermines the separation claim that is load-bearing for the paper's contribution.
Authors: The separation is realized by construction: simulation parameters are conditioned exclusively on the geometric Gaussian attributes (means, covariances, and rotations) that encode ensemble structural variations, while visualization parameters (transfer functions, isosurface thresholds) are conditioned only on the appearance attributes (spherical harmonics coefficients and opacities). Because these two groups of parameters modify disjoint subsets of the Gaussian representation, cross-talk is structurally limited. Nevertheless, we acknowledge that an auxiliary regularizer would provide additional assurance. In the revised method section we will introduce a lightweight orthogonality regularizer on the deformation gradients produced by simulation versus visualization parameters, together with an ablation that quantifies any residual interference. This constitutes a partial revision that augments rather than replaces the existing explicit formulation. revision: partial
Circularity Check
No circularity: new constructive surrogate architecture
full rationale
The paper presents GS-Surrogate as a novel construction: a canonical Gaussian field is built as base representation, then adapted via sequential parameter-conditioned deformations that explicitly separate simulation variations from visualization changes. No equations, predictions, or central claims reduce to inputs by construction, fitted parameters renamed as outputs, or load-bearing self-citations. The derivation chain is self-contained as an explicit 3D surrogate method evaluated on datasets, with no self-definitional loops or ansatzes smuggled via prior author work. This aligns with the absence of any quoted reduction in the abstract or described framework.
Axiom & Free-Parameter Ledger
free parameters (1)
- Deformation conditioning parameters
axioms (1)
- domain assumption Gaussian Splatting can serve as an explicit, deformable 3D scene representation.
invented entities (2)
-
Canonical Gaussian field
no independent evidence
-
Sequential parameter-conditioned deformations
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
constructs a canonical Gaussian field as a base 3D representation and adapts it through sequential parameter-conditioned deformations... Fsim(μ,Psim)=(Δμp,Δsp,Δqp,Δcp,Δop)
-
IndisputableMonolith/Foundation/AbsoluteFloorClosure.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
two-level deformation framework that first adapts the canonical representation to simulation-parameter variations and then to different visualization tasks
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
J. Ahrens, S. Jourdain, P. O’Leary, J. Patchett, D. H. Rogers, and M. Pe- tersen. An image-based approach to extreme scale in situ visualization and analysis. InSC’14: Proceedings of the International Conference for High Performance Computing, Networking, Storage and Analysis, pp. 424–434. IEEE, 2014. doi: 10.1109/SC.2014.40 2
-
[2]
A. S. Almgren, J. B. Bell, M. J. Lijewski, Z. Luki ´c, and E. Van Andel. Nyx: A massively parallel amr code for computational cosmology.The Astrophysical Journal, 765(1):39, 2013. doi: 10.1088/0004-637X/765/1/ 39 5
-
[3]
J. Bae, S. Kim, Y . Yun, H. Lee, G. Bang, and Y . Uh. Per-gaussian embedding-based deformation for deformable 3d gaussian splatting. In European Conference on Computer Vision, pp. 321–335. Springer, 2024. doi: 10.48550/arXiv.2404.03613 Focus to learn more 2
-
[4]
P. Bartholomew, G. Deskos, R. A. Frantz, F. N. Schuch, E. Lamballais, and S. Laizet. Xcompact3d: An open-source framework for solving turbulence problems on a cartesian mesh.SoftwareX, 12:100550, 2020. doi: 10. 1016/j.softx.2020.100550 5
-
[5]
A. C. Bauer, H. Abbasi, J. Ahrens, H. Childs, B. Geveci, S. Klasky et al. In situ methods, infrastructures, and applications on high performance computing platforms. InComputer Graphics Forum, vol. 35, pp. 577–597. Wiley Online Library, 2016. doi: 10.1111/cgf.12930 1
-
[6]
M. Berger, J. Li, and J. A. Levine. A generative model for volume rendering.IEEE transactions on visualization and computer graphics, 25(4):1636–1650, 2018. doi: 10.1109/TVCG.2018.2816059 2
-
[7]
T. Biedert and C. Garth. Contour tree depth images for large data visualiza- tion. InEGPGV@ EuroVis, pp. 77–86, 2015. doi: 10.2312/pgv.20151158 2
-
[8]
Biswas and T
A. Biswas and T. Turton. Cloverleaf data artifacts for artimis ldrd. Tech- nical report, Los Alamos National Laboratory (LANL), 2026. doi: 10. 25583/3022785 5
2026
-
[9]
A. Bock, A. Pembroke, M. L. Mays, L. Rastaetter, T. Ropinski, and A. Ynnerman. Visual verification of space weather ensemble simulations. In2015 IEEE Scientific Visualization Conference (SciVis), pp. 17–24. IEEE, 2015. doi: 10.1109/SciVis.2015.7429487 2
-
[10]
S. Bruckner and T. Möller. Result-driven exploration of simulation param- eter spaces for visual effects design.IEEE Transactions on Visualization and Computer Graphics, 16(6):1468–1476, 2010. doi: 10.1109/TVCG. 2010.190 2
-
[11]
A. Cao and J. Johnson. Hexplane: A fast representation for dynamic scenes. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 130–141, 2023. doi: 10.48550/arXiv.2301. 09632 2
-
[12]
Chao, H.-Y
B. Chao, H.-Y . Tseng, L. Porzi, C. Gao, T. Li, Q. Li et al. Textured gaussians for enhanced 3d scene appearance modeling. InProceedings of the Computer Vision and Pattern Recognition Conference, pp. 8964–8974,
-
[13]
doi: 10.48550/arXiv.2411.18625 9
-
[14]
A. Chen, Z. Xu, A. Geiger, J. Yu, and H. Su. Tensorf: Tensorial radiance fields. InEuropean conference on computer vision, pp. 333–350. Springer,
-
[15]
doi: 10.48550/arXiv.2203.09517 1
-
[16]
H. Chen, S. Zhang, W. Chen, H. Mei, J. Zhang, A. Mercer et al. Uncertainty-aware multidimensional ensemble data visualization and ex- ploration.IEEE transactions on visualization and computer graphics, 21(9):1072–1086, 2015. doi: 10.1109/TVCG.2015.2410278 2
-
[17]
S. Frey, F. Sadlo, and T. Ertl. Explorable volumetric depth images from raycasting. In2013 XXVI Conference on Graphics, Patterns and Images, pp. 123–130. IEEE, 2013. doi: 10.1109/SIBGRAPI.2013.26 2
-
[18]
S. Fridovich-Keil, G. Meanti, F. R. Warburg, B. Recht, and A. Kanazawa. K-planes: Explicit radiance fields in space, time, and appearance. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 12479–12488, 2023. doi: 10.48550/arXiv.2301.10241 2, 6
-
[19]
S. Fridovich-Keil, A. Yu, M. Tancik, Q. Chen, B. Recht, and A. Kanazawa. Plenoxels: Radiance fields without neural networks. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 5501–5510, 2022. doi: 10.48550/arXiv.2112.05131 2
-
[20]
J. Han and C. Wang. Coordnet: Data generation and visualization gen- eration for time-varying volumes via a coordinate-based neural network. IEEE Transactions on Visualization and Computer Graphics, 29(12):4951– 4963, 2022. doi: 10.1109/TVCG.2022.3197203 1
-
[21]
W. He, J. Wang, H. Guo, K.-C. Wang, H.-W. Shen, M. Raj et al. Insi- tunet: Deep image synthesis for parameter space exploration of ensemble simulations.IEEE transactions on visualization and computer graphics, 26(1):23–33, 2019. doi: 10.1109/TVCG.2019.2934312 1, 2, 6
-
[22]
Huynh-Thu and M
Q. Huynh-Thu and M. Ghanbari. Scope of validity of psnr in image/video quality assessment.Electronics letters, 44(13):800–801, 2008. doi: 10. 1049/el:20080522 6
2008
-
[23]
3d gaussian splatting for real-time radiance field rendering
B. Kerbl, G. Kopanas, T. Leimkühler, G. Drettakis, et al. 3d gaussian splatting for real-time radiance field rendering.ACM Trans. Graph., 42(4):139–1, 2023. doi: 10.48550/arXiv.2308.04079 1, 2, 4
-
[24]
D. Li, S.-S. Huang, Z. Lu, X. Duan, and H. Huang. St-4dgs: Spatial- temporally consistent 4d gaussian splatting for efficient dynamic scene rendering. InACM SIGGRAPH 2024 Conference Papers, pp. 1–11, 2024. doi: 10.1145/3641519.3657520 2
-
[25]
Z. Lu, X. Guo, L. Hui, T. Chen, M. Yang, X. Tang et al. 3d geometry-aware deformable gaussian splatting for dynamic view synthesis. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 8900–8910, 2024. doi: 10.48550/arXiv.2404.06270 2
-
[26]
K.-L. Ma. In situ visualization at extreme scale: Challenges and oppor- tunities.IEEE Computer Graphics and Applications, 29(6):14–19, 2009. doi: 10.1109/MCG.2009.120 1, 2
-
[27]
Matkovic, D
K. Matkovic, D. Gracanin, B. Klarin, and H. Hauser. Interactive visual analysis of complex scientific data as families of data surfaces.IEEE Transactions on Visualization and Computer Graphics, 15(6):1351–1358,
-
[28]
doi: 10.1109/TVCG.2009.155 2
-
[29]
B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Barron, R. Ramamoorthi, and R. Ng. Nerf: Representing scenes as neural radiance fields for view synthesis.Communications of the ACM, 65(1):99–106, 2021. doi: 10. 48550/arXiv.2003.08934 1, 2
-
[30]
H. Obermaier, K. Bensema, and K. I. Joy. Visual trends analysis in time- varying ensembles.IEEE transactions on visualization and computer graphics, 22(10):2331–2342, 2015. doi: 10.1109/TVCG.2015.2507592 2
-
[31]
D. Orban, D. F. Keefe, A. Biswas, J. Ahrens, and D. Rogers. Drag and track: A direct manipulation interface for contextualizing data instances within a continuous parameter space.IEEE transactions on visualization and computer graphics, 25(1):256–266, 2018. doi: 10.1109/tvcg.2018. 2865051 2
-
[32]
J. Poco, A. Dasgupta, Y . Wei, W. Hargrove, C. R. Schwalm, D. N. Huntzinger et al. Visual reconciliation of alternative similarity spaces in climate modeling.IEEE transactions on visualization and computer graphics, 20(12):1923–1932, 2014. doi: 10.1109/TVCG.2014.2346755 2
-
[33]
T. Ringler, M. Petersen, R. L. Higdon, D. Jacobsen, P. W. Jones, and M. Maltrud. A multi-resolution approach to global ocean modeling.Ocean Modelling, 69:211–232, 2013. doi: 10.1016/j.ocemod.2013.04.010 5
-
[34]
N. Shi, J. Xu, H. Li, H. Guo, J. Woodring, and H.-W. Shen. Vdl-surrogate: A view-dependent latent-based model for parameter space exploration of ensemble simulations.IEEE Transactions on Visualization and Computer Graphics, 29(1):820–830, 2022. doi: 10.48550/arXiv.2207.13091 2, 5
-
[35]
N. Shi, J. Xu, S. W. Wurster, H. Guo, J. Woodring, L. P. Van Roekel et al. Gnn-surrogate: A hierarchical and adaptive graph neural network for parameter space exploration of unstructured-mesh ocean simulations. IEEE Transactions on Visualization and Computer Graphics, 28(6):2301– 2313, 2022. doi: 10.1109/TVCG.2022.3165345 2, 3
-
[36]
J. Wang, X. Liu, H.-W. Shen, and G. Lin. Multi-resolution climate en- semble parameter analysis with nested parallel coordinates plots.IEEE transactions on visualization and computer graphics, 23(1):81–90, 2016. doi: 10.1109/TVCG.2016.2598830 2
-
[37]
Z. Wang, A. C. Bovik, H. R. Sheikh, and E. P. Simoncelli. Image quality assessment: from error visibility to structural similarity.IEEE transac- tions on image processing, 13(4):600–612, 2004. doi: 10.1109/TIP.2003. 819861 6
-
[38]
G. Wu, T. Yi, J. Fang, L. Xie, X. Zhang, W. Wei et al. 4d gaussian splatting for real-time dynamic scene rendering. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 20310–20320,
-
[39]
doi: 10.48550/arXiv.2310.08528 1, 2, 6
-
[40]
Z. Yang, X. Gao, W. Zhou, S. Jiao, Y . Zhang, and X. Jin. Deformable 3d gaussians for high-fidelity monocular dynamic scene reconstruction. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 20331–20341, 2024. doi: 10.48550/arXiv.2309.13101 1, 2
-
[41]
Z. Yang, H. Yang, Z. Pan, and L. Zhang. Real-time photorealistic dynamic scene representation and rendering with 4d gaussian splatting.arXiv preprint arXiv:2310.10642, 2023. doi: 10.48550/arXiv.2310.10642 2
-
[42]
S. Yao, Y . Lu, and C. Wang. Visnerf: Efficient multidimensional neu- ral radiance field representation for visualization synthesis of dynamic volumetric scenes. In2025 IEEE 18th Pacific Visualization Conference (PacificVis), pp. 235–245. IEEE, 2025. doi: 10.48550/arXiv.2502.16731 1, 2, 3, 6
-
[43]
The Unreasonable Effectiveness of Deep Features as a Perceptual Metric
R. Zhang, P. Isola, A. A. Efros, E. Shechtman, and O. Wang. The unreason- able effectiveness of deep features as a perceptual metric. InProceedings of the IEEE conference on computer vision and pattern recognition, pp. 586–595, 2018. doi: 10.48550/arXiv.1801.03924 6
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.