Recognition: no theorem link
Designing Privacy-Preserving Visual Perception for Robot Navigation Based on User Privacy Preferences
Pith reviewed 2026-05-10 18:33 UTC · model grok-4.3
The pith
User studies show that preferred camera resolution for robot navigation depends on both desired privacy level and robot proximity.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
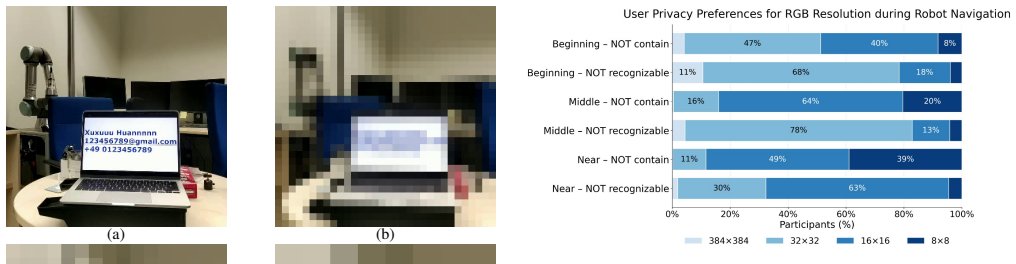
We propose a user-centered approach to designing privacy-preserving visual perception for robot navigation. To investigate how user privacy preferences can inform such design, we conducted two user studies. The results show that users prefer privacy-preserving visual abstractions and capture-time low-resolution preservation mechanisms: their preferred RGB resolution depends both on the desired privacy level and robot proximity during navigation. Based on these findings, we further derive a user-configurable distance-to-resolution privacy policy for privacy-preserving robot visual navigation.
What carries the argument
The user-configurable distance-to-resolution privacy policy that maps desired privacy level and measured robot proximity to an appropriate RGB resolution or visual abstraction.
If this is right
- Robots can lower image resolution automatically as they approach users to match stated privacy preferences.
- Users gain the ability to set a privacy level that the robot then applies across different distances.
- Capture-time low-resolution or abstraction replaces full-resolution RGB images when the policy requires it.
- The same preference data can guide policy adjustments for different environments or user groups.
Where Pith is reading between the lines
- The policy could be combined with existing distance sensors already used for obstacle avoidance, requiring little extra hardware.
- Real deployments might show that certain navigation tasks need temporary overrides when resolution drops too low.
- Extending the same preference-based mapping to other modalities such as depth or audio could broaden privacy protection.
- Longitudinal studies with the same users could reveal whether preferences remain stable over repeated interactions.
Load-bearing premise
The preferences measured in the two user studies accurately represent real-world user behavior and can be translated into an effective navigation-safe policy without significant loss of robot performance.
What would settle it
A controlled field deployment in which robots navigate using the derived policy while recording both user privacy satisfaction ratings and objective navigation metrics such as path completion time and collision avoidance would directly test whether the policy works in practice.
Figures






read the original abstract
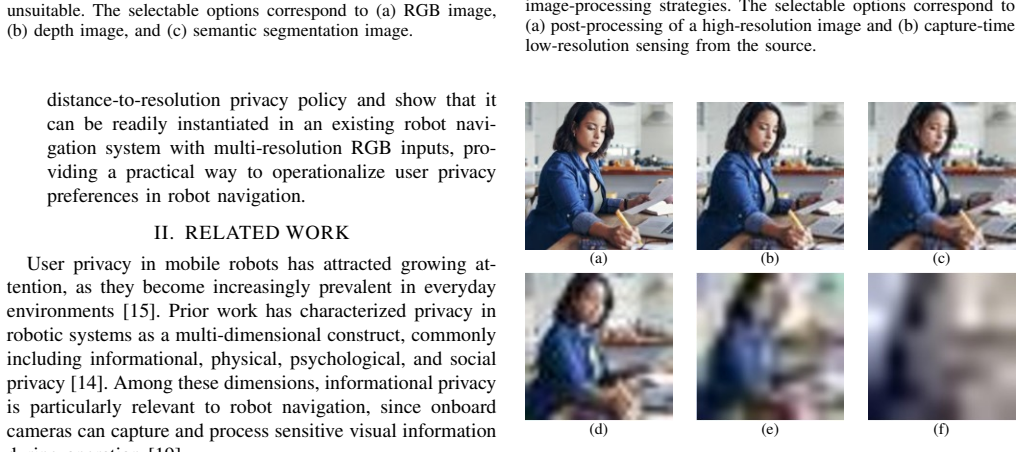
Visual navigation is a fundamental capability of mobile service robots, yet the onboard cameras required for such navigation can capture privacy-sensitive information and raise user privacy concerns. Existing approaches to privacy-preserving navigation-oriented visual perception have largely been driven by technical considerations, with limited grounding in user privacy preferences. In this work, we propose a user-centered approach to designing privacy-preserving visual perception for robot navigation. To investigate how user privacy preferences can inform such design, we conducted two user studies. The results show that users prefer privacy-preserving visual abstractions and capture-time low-resolution preservation mechanisms: their preferred RGB resolution depends both on the desired privacy level and robot proximity during navigation. Based on these findings, we further derive a user-configurable distance-to-resolution privacy policy for privacy-preserving robot visual navigation.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
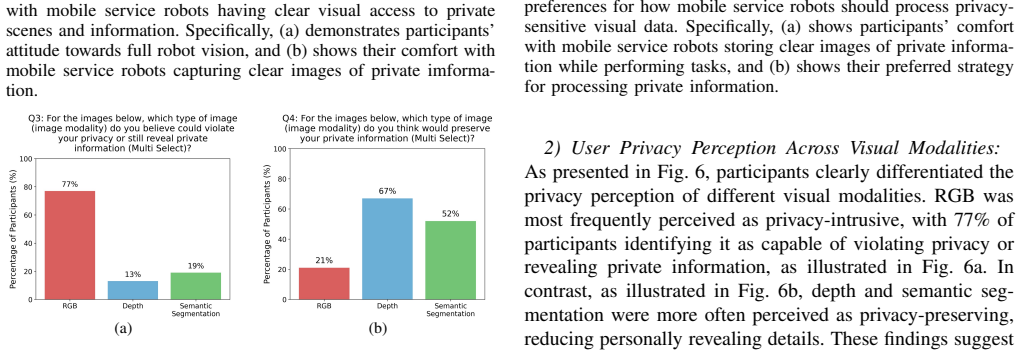
Summary. The paper proposes a user-centered approach to privacy-preserving visual perception for robot navigation. It reports findings from two user studies showing that users prefer privacy-preserving visual abstractions and capture-time low-resolution mechanisms, with preferred RGB resolution depending on both the desired privacy level and robot proximity during navigation. From these results, the authors derive a user-configurable distance-to-resolution privacy policy intended for privacy-preserving robot visual navigation.
Significance. If the user-study findings hold and the derived policy can be shown to preserve adequate visual information for core navigation tasks, the work would be significant for integrating empirical user preferences into the design of service-robot perception systems. It moves beyond purely technical privacy mechanisms by grounding design choices in user data and offers a configurable policy that could be adopted in real deployments. The explicit linkage of proximity, privacy level, and resolution is a concrete contribution that could inform future privacy-aware robotics research.
major comments (2)
- [§3] §3 (User Studies): The abstract and results section state clear outcomes from two user studies on preferred RGB resolution, but the manuscript provides no details on study design, sample size, statistical methods, participant demographics, or validation procedures. Without this information it is impossible to determine whether the reported dependence of resolution on privacy level and proximity is supported by the data.
- [§4] §4 (Policy Derivation): The central claim that a usable distance-to-resolution privacy policy can be derived from the user preferences rests on the assumption that the measured preferences translate to navigation-safe visual input. The manuscript contains no ablation studies, closed-loop experiments, or benchmarks comparing navigation success rates, collision rates, localization error, or path-planning performance under the derived policy versus a full-resolution baseline.
minor comments (1)
- [Abstract] The abstract could more explicitly note that the studies measure stated preferences rather than observed behavior in a live navigation setting.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review. We address each major comment below and indicate planned revisions to enhance the manuscript's clarity and rigor.
read point-by-point responses
-
Referee: [§3] §3 (User Studies): The abstract and results section state clear outcomes from two user studies on preferred RGB resolution, but the manuscript provides no details on study design, sample size, statistical methods, participant demographics, or validation procedures. Without this information it is impossible to determine whether the reported dependence of resolution on privacy level and proximity is supported by the data.
Authors: We agree that the current manuscript lacks sufficient methodological details. In the revised version, we will expand §3 with a dedicated subsection covering study design, participant recruitment and demographics, sample sizes, statistical methods (including any tests for dependence on privacy level and proximity), and validation procedures. This will substantiate the reported user preferences for abstractions and distance-dependent low-resolution capture. revision: yes
-
Referee: [§4] §4 (Policy Derivation): The central claim that a usable distance-to-resolution privacy policy can be derived from the user preferences rests on the assumption that the measured preferences translate to navigation-safe visual input. The manuscript contains no ablation studies, closed-loop experiments, or benchmarks comparing navigation success rates, collision rates, localization error, or path-planning performance under the derived policy versus a full-resolution baseline.
Authors: Our work focuses on empirically deriving a configurable policy from user preferences rather than validating its effects on navigation performance metrics. The manuscript does not assert that the policy maintains equivalent navigation safety to full resolution. We will add a 'Limitations and Future Work' section acknowledging the assumption about sufficient visual information for navigation tasks and outlining the need for future closed-loop evaluations. No such ablation or benchmark experiments were conducted in this study. revision: partial
Circularity Check
No circularity: policy derived from independent user-study data
full rationale
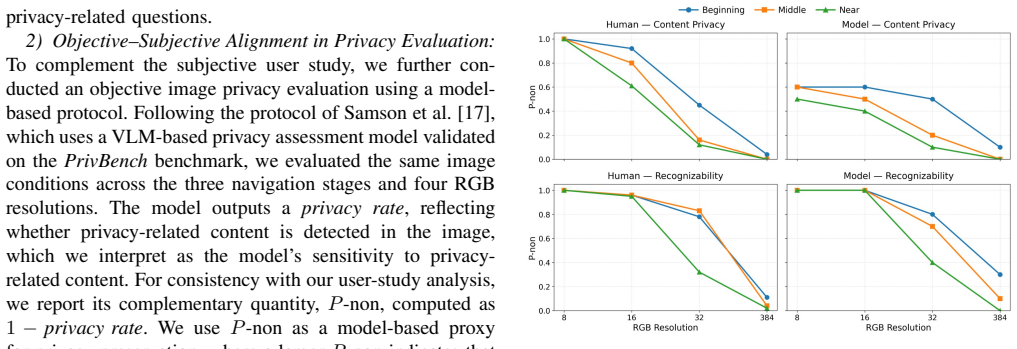
The paper conducts two user studies measuring preferences for visual abstractions and capture-time resolutions as functions of stated privacy level and robot proximity. It then derives a configurable distance-to-resolution policy directly from those empirical observations. No step reduces the policy to a self-definition, renames a fitted parameter as a prediction, or relies on a load-bearing self-citation whose content is unverified outside the present work. The derivation chain remains open to external validation (e.g., closed-loop navigation benchmarks) and does not collapse by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Findings from the two user studies accurately reflect broader user privacy preferences and can be directly translated into a practical robot navigation policy.
Reference graph
Works this paper leans on
-
[1]
Do you follow? a fully automated system for adaptive robot presenters,
A. Axelsson and G. Skantze, “Do you follow? a fully automated system for adaptive robot presenters,” inIEEE Intl. Conf. on Human- Robot Interaction (HRI), 2023
2023
-
[2]
Visual navigation for mobile robots: A survey,
F. Bonin-Font, A. Ortiz, and G. Oliver, “Visual navigation for mobile robots: A survey,”Pattern Recognition Letters, 2008
2008
-
[3]
Object goal navigation using goal-oriented semantic exploration,
D. S. Chaplot, D. P. Gandhi, A. Gupta, and R. R. Salakhutdinov, “Object goal navigation using goal-oriented semantic exploration,” inProc. of the Conf. on Neural Information Processing Systems (NeurIPS), 2020
2020
-
[4]
arXiv preprint arXiv:2505.05519 , year=
M. Choi, Y . Yang, N. P. Bhatt, K. Gupta, S. Shah, A. Rai, D. Fridovich- Keil, U. Topcu, and S. P. Chinchali, “Real-time privacy preservation for robot visual perception,”arXiv preprint arXiv:2505.05519, 2025
-
[5]
What should a robot disclose about me? a study about privacy-appropriate behaviors for social robots,
M. Dietrich, M. Krüger, and T. H. Weisswange, “What should a robot disclose about me? a study about privacy-appropriate behaviors for social robots,”Frontiers in Robotics and AI, vol. 10, p. 1236733, 2023
2023
-
[6]
Robot companion: A social- force based approach with human awareness-navigation in crowded environments,
G. Ferrer, A. Garrell, and A. Sanfeliu, “Robot companion: A social- force based approach with human awareness-navigation in crowded environments,” inIn RSJ International Conference on Intelligent Robots and Systems, 2013
2013
-
[7]
Semnav: A semantic segmentation-driven approach to visual semantic navigation,
R. Flor-Rodríguez, C. Gutiérrez-Álvarez, F. J. Acevedo-Rodríguez, S. Lafuente-Arroyo, and R. J. López-Sastre, “Semnav: A semantic segmentation-driven approach to visual semantic navigation,”arXiv preprint arXiv:2506.01418, 2025
-
[8]
Privacy-Preserving Semantic Segmentation from Ultra-Low-Resolution RGB Inputs
X. Huang, S. Pan, O. Zatsarynna, J. Gall, and M. Bennewitz, “Im- proved semantic segmentation from ultra-low-resolution rgb images applied to privacy-preserving object-goal navigation,”arXiv preprint arXiv:2507.16034, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[9]
Perspectives on deepfakes for privacy: comparing perceptions of photo owners and obfuscated individuals towards deepfake versus traditional privacy-enhancing obfuscation,
M. Khamis, R. Panskus, H. Farzand, M. Mumm, S. Macdonald, and K. Marky, “Perspectives on deepfakes for privacy: comparing perceptions of photo owners and obfuscated individuals towards deepfake versus traditional privacy-enhancing obfuscation,” inProc. of international conference on Mobile and ubiquitous multimedia, 2024
2024
-
[10]
A picture is worth a thousand risks: Inferring privacy risks from home interior images via object-level sensitivity analysis,
L. Kqiku, E. Bark, A. Misra, and D. Reinhardt, “A picture is worth a thousand risks: Inferring privacy risks from home interior images via object-level sensitivity analysis,” inProc. of IEEE Intl. Conf. on Pervasive Computing and Communications (PerCom), 2026
2026
-
[11]
Mosaic: Generating consistent, privacy-preserving scenes from multiple depth views in multi-room environments,
Z. Liu, H. Zhu, R. Chen, J. Francis, S. Hwang, J. Zhang, and J. Oh, “Mosaic: Generating consistent, privacy-preserving scenes from multiple depth views in multi-room environments,” inProceedings of the IEEE/CVF International Conference on Computer Vision, 2025, pp. 27 456–27 465
2025
-
[12]
Segloc: Learning segmentation-based representations for privacy-preserving visual localization,
M. Pietrantoni, M. Humenberger, T. Sattler, and G. Csurka, “Segloc: Learning segmentation-based representations for privacy-preserving visual localization,” inProc. of the IEEE/CVF Conf. on Computer Vision and Pattern Recognition (CVPR), 2023
2023
-
[13]
Privacy-friendly mobile avatar for sick schoolchildren,
PRIV ATAR, “Privacy-friendly mobile avatar for sick schoolchildren,”
-
[14]
Available: https://privatar.de/en/
[Online]. Available: https://privatar.de/en/
-
[15]
I still need my privacy: Exploring the level of comfort and privacy preferences of german- speaking older adults in the case of mobile assistant robots,
D. Reinhardt, M. Khurana, and L. H. Acosta, “I still need my privacy: Exploring the level of comfort and privacy preferences of german- speaking older adults in the case of mobile assistant robots,”Journal of Pervasive and Mobile Computing (PMC), vol. 74, 2021
2021
-
[16]
Privacy in human-robot interaction: Survey and future work,
M. Rueben and W. D. Smart, “Privacy in human-robot interaction: Survey and future work,”Proceedings of the International Conference on WeRobot, 2016
2016
-
[17]
Framing effects on privacy concerns about a home telepresence robot,
M. Rueben, F. J. Bernieri, C. M. Grimm, and W. D. Smart, “Framing effects on privacy concerns about a home telepresence robot,” inIEEE Intl. Conf. on Human-Robot Interaction (HRI), 2017
2017
-
[18]
Little data, big impact: Privacy-aware visual language models via minimal tuning,
L. Samson, N. Barazani, S. Ghebreab, and Y . M. Asano, “Little data, big impact: Privacy-aware visual language models via minimal tuning,”arXiv preprint arXiv:2405.17423, 2024
-
[19]
Indoor segmen- tation and support inference from rgbd images,
N. Silberman, D. Hoiem, P. Kohli, and R. Fergus, “Indoor segmen- tation and support inference from rgbd images,” inProc. of the Europ. Conf. on Computer Vision (ECCV), 2012
2012
-
[20]
The need for inherently privacy-preserving vision in trustworthy autonomous systems,
A. K. Taras, N. Suenderhauf, P. Corke, and D. G. Dansereau, “The need for inherently privacy-preserving vision in trustworthy autonomous systems,”arXiv preprint arXiv:2303.16408, 2023
-
[21]
Socially aware robot navigation system in human-populated and interactive environments based on an adaptive spatial density function and space affordances,
A. Vega, L. J. Manso, D. G. Macharet, B. Pablo, and P. Núñez, “Socially aware robot navigation system in human-populated and interactive environments based on an adaptive spatial density function and space affordances,”Pattern Recognition Letters, 2019
2019
-
[22]
Privacy-preserved visual simultaneous localization and mapping based on a dual-component approach,
M. Yang, C. Huang, X. Huang, and S. Hou, “Privacy-preserved visual simultaneous localization and mapping based on a dual-component approach,”Applied Sciences, 2025
2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.