Recognition: no theorem link
UMI: GPU-Accelerated Asymmetric Robust Estimator for Photometric Detrending in Exoplanet Transit Searches
Pith reviewed 2026-05-10 18:32 UTC · model grok-4.3
The pith
An asymmetric robust estimator recovers shallow exoplanet transit depths more accurately while running 69 times faster on GPU.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
UMI modifies the standard Tukey bisquare M-estimator with an asymmetric weight function that penalizes downward deviations more aggressively than upward ones and an upper-RMS scale estimator computed from above-median residuals only, ensuring that transit dips never contaminate the noise estimate, and implements the full procedure as a fused HIP/CUDA GPU kernel.
What carries the argument
The asymmetric weight function together with the upper-RMS scale estimator inside the modified Tukey bisquare M-estimator, executed as a single fused GPU kernel.
If this is right
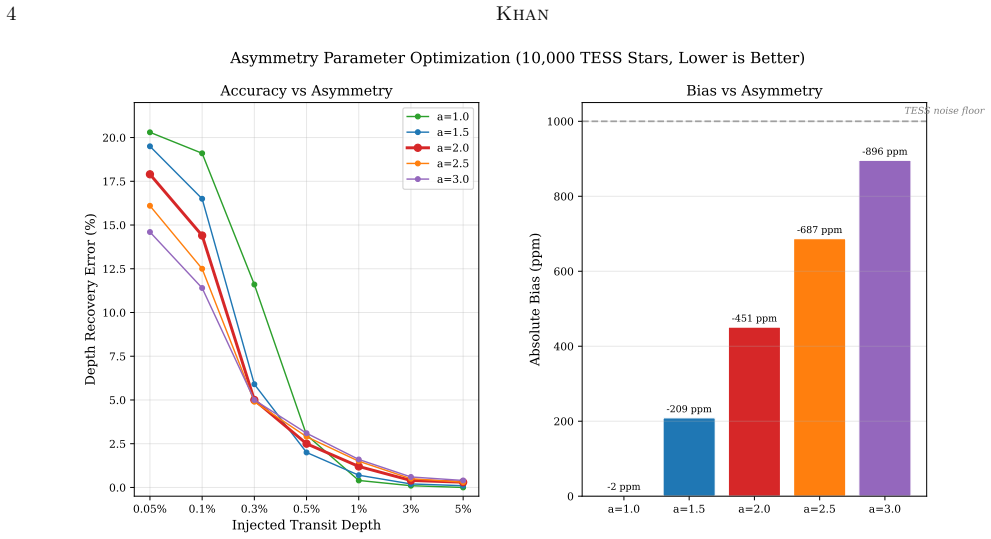
- At 0.1 percent transit depth, median depth recovery error drops from 20.5 percent to 15.8 percent on TESS data.
- The same error drops from 14.6 percent to 4.2 percent on Kepler data.
- Detrending time per star falls from 234 ms to 3.4 ms, a 69-fold speedup.
- End-to-end pipeline throughput rises by a factor of 37 relative to the wotan biweight implementation.
- The accuracy advantage is strongest for transit depths well above the photometric noise floor.
Where Pith is reading between the lines
- The directional bias in the weighting could be adapted to other astronomical time series that contain one-sided signals, such as certain eclipsing binaries or flare detections.
- The reported GPU kernel speed suggests the method could support real-time detrending in future high-cadence surveys.
- Performance on ground-based photometry with stronger correlated noise remains untested and may narrow the reported gains.
Load-bearing premise
Transit signals are always strictly below the continuum and no other downward-going systematics or correlated noise will be mistaken for them.
What would settle it
A controlled injection test on light curves that contain artificial downward spikes unrelated to transits, measuring whether UMI produces systematically worse trend fits or depth biases than a symmetric biweight estimator.
Figures





read the original abstract
We present UMI (Unified Median Iterative), a novel robust location estimator for detrending photometric time series in exoplanet transit surveys. UMI modifies the standard Tukey bisquare M-estimator with two innovations: (1) an asymmetric weight function that penalizes downward deviations (transit dips) more aggressively than upward ones, exploiting the physical constraint that transits are always below the stellar continuum, and (2) an upper-RMS scale estimator computed from above-median residuals only, ensuring that transit dips never contaminate the noise estimate. Implemented as a fused HIP/CUDA GPU kernel, UMI achieves 69x faster detrending (3.4 ms vs 234 ms per star) and 37x faster full pipeline throughput compared to the wotan biweight implementation. Injection-recovery tests across TESS, Kepler, and K2 show that UMI's advantage is concentrated at planet-scale transit depths above the photometric noise floor: at 0.1% transit depth, UMI reduces median depth recovery error from 20.5% to 15.8% on TESS (23% improvement) and from 14.6% to 4.2% on Kepler (71% improvement). At shallower depths approaching the noise floor, all sliding-window methods converge to comparable performance. Validated across 802 confirmed exoplanets from TESS and Kepler, UMI occupies a previously unfilled region of the speed-accuracy tradeoff for transit detrending. The tool is publicly available as pip install torchflat.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces UMI (Unified Median Iterative), a GPU-accelerated modification of the Tukey bisquare M-estimator for photometric detrending in exoplanet transit searches. It incorporates an asymmetric weight function that penalizes downward deviations more aggressively than upward ones and an upper-RMS scale estimator computed exclusively from above-median residuals. The central claims are a 69x speedup in detrending (3.4 ms per star) relative to wotan biweight, plus improved transit depth recovery in injection-recovery tests: at 0.1% depth, median depth recovery error drops from 20.5% to 15.8% on TESS and from 14.6% to 4.2% on Kepler, with comparable performance at shallower depths and validation across 802 confirmed exoplanets.
Significance. If the performance claims hold under realistic conditions, UMI would occupy a useful position in the speed-accuracy tradeoff for large-scale transit surveys by exploiting the one-sided nature of transits. The GPU kernel implementation and public pip package are concrete strengths that could enable broader adoption. The reported gains are concentrated at planet-scale depths above the noise floor, which aligns with practical needs in TESS/Kepler/K2 analyses.
major comments (2)
- [Abstract and §4] Abstract and §4 (injection-recovery tests): The reported depth-recovery improvements (e.g., 14.6% → 4.2% on Kepler at 0.1% depth) rest on the assumption that the asymmetric weighting and upper-RMS scale can isolate transits without bias from other downward systematics. However, the test description does not specify whether the light curves included realistic correlated noise, instrumental dips, or additional astrophysical signals below the continuum; without such mixtures, the 23–71% error reductions may not generalize to actual survey data.
- [§3.1] §3.1 (asymmetric weight function and upper-RMS definition): The claim that 'transit dips never contaminate the noise estimate' follows directly from restricting the RMS to above-median residuals, but the interaction between the asymmetric weights and the location estimate itself is not shown to remain unbiased when multiple downward excursions (transits plus systematics) are present simultaneously. A concrete test with injected transits plus independent downward noise components would be required to support the central performance claims.
minor comments (2)
- [Abstract] The abstract states '37x faster full pipeline throughput' without defining the baseline pipeline components or whether the comparison includes I/O and downstream transit search steps.
- [§3] Notation for the asymmetry tuning constant is introduced but its default value and sensitivity analysis are not tabulated or plotted.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed review. The comments highlight important aspects of validation and clarity that we will address in the revised manuscript. We respond point by point below.
read point-by-point responses
-
Referee: [Abstract and §4] Abstract and §4 (injection-recovery tests): The reported depth-recovery improvements (e.g., 14.6% → 4.2% on Kepler at 0.1% depth) rest on the assumption that the asymmetric weighting and upper-RMS scale can isolate transits without bias from other downward systematics. However, the test description does not specify whether the light curves included realistic correlated noise, instrumental dips, or additional astrophysical signals below the continuum; without such mixtures, the 23–71% error reductions may not generalize to actual survey data.
Authors: The injection-recovery tests were performed on real TESS and Kepler light curves drawn from the survey archives (with transits injected at known depths), which inherently contain realistic correlated noise, instrumental artifacts, and other astrophysical signals. The separate validation across 802 confirmed exoplanets from TESS and Kepler further demonstrates performance on unaltered survey data. We acknowledge that §4 could be more explicit about these data properties. In the revision we will expand the test description to include quantitative noise statistics for the light curves, representative examples of included systematics, and a statement confirming that the tests use real survey data rather than idealized white-noise simulations. revision: yes
-
Referee: [§3.1] §3.1 (asymmetric weight function and upper-RMS definition): The claim that 'transit dips never contaminate the noise estimate' follows directly from restricting the RMS to above-median residuals, but the interaction between the asymmetric weights and the location estimate itself is not shown to remain unbiased when multiple downward excursions (transits plus systematics) are present simultaneously. A concrete test with injected transits plus independent downward noise components would be required to support the central performance claims.
Authors: We agree that an explicit demonstration of unbiased location estimation under simultaneous downward signals strengthens the central claims. While the upper-RMS definition prevents scale contamination by construction, the coupled effect of asymmetric weights on the iterative location estimate merits direct verification. In the revised manuscript we will add a targeted simulation (new panel or short subsection in §3.1) that injects both planetary transits and independent downward systematics (e.g., additional instrumental dips or flares) into controlled light curves and quantifies the residual bias in the recovered continuum. This will directly address the referee’s request for a concrete test. revision: yes
Circularity Check
No circularity: method is explicit modification of known estimator; performance from independent injection tests
full rationale
The paper defines UMI explicitly as a modification of the standard Tukey bisquare M-estimator, adding an asymmetric weight function and an upper-RMS scale estimator computed only from above-median residuals. These are presented as direct innovations without deriving them from the target performance metrics. Validation relies on injection-recovery tests using real TESS, Kepler, and K2 light curves with injected transits, which are external benchmarks independent of the estimator's internal parameters or definitions. No self-citations, self-definitional loops, or fitted inputs renamed as predictions appear in the derivation or claims. The central results (speed and depth-recovery improvements) are therefore not equivalent to the inputs by construction.
Axiom & Free-Parameter Ledger
free parameters (1)
- asymmetry tuning constant
axioms (1)
- domain assumption Transits produce only downward deviations in photometric time series
Reference graph
Works this paper leans on
-
[1]
Akeson, R. L., Chen, X., Ciardi, D., et al. 2013, Publications of the Astronomical Society of the Pacific, 125, 989, doi: 10.1086/672273
-
[2]
Kepler Planet-Detection Mission: Introduction and First Results.Science2010,327, 977
Borucki, W. J., Koch, D., Basri, G., et al. 2010, Science, 327, 977, doi: 10.1126/science.1185402
-
[3]
Cleveland, W. S. 1979, Journal of the American Statistical Association, 74, 829, doi: 10.1080/01621459.1979.10481038
-
[4]
Foreman-Mackey, D., Agol, E., Ambikasaran, S., & Angus, R. 2017, The Astronomical Journal, 154, 220, doi: 10.3847/1538-3881/aa9332
-
[5]
Stahel, W. A. 1986, Robust Statistics: The Approach Based on Influence Functions (John Wiley & Sons)
1986
-
[6]
Hippke, M., David, T. J., Mulders, G. D., & Heller, R. 2019, The Astronomical Journal, 158, 143, doi: 10.3847/1538-3881/ab3984 10Khan
-
[7]
2019, Astronomy & Astrophysics, 623, A39, doi: 10.1051/0004-6361/201834672
Hippke, M., & Heller, R. 2019, Astronomy & Astrophysics, 623, A39, doi: 10.1051/0004-6361/201834672
-
[8]
Hoare, C. A. R. 1961, Communications of the ACM, 4, 321, doi: 10.1145/366622.366647
-
[9]
B., Sobeck, C., Haas, M., et al
Howell, S. B., Sobeck, C., Haas, M., et al. 2014, Publications of the Astronomical Society of the Pacific, 126, 398, doi: 10.1086/676406 Kov´ acs, G., Zucker, S., & Mazeh, T. 2002, Astronomy & Astrophysics, 391, 369, doi: 10.1051/0004-6361:20020802 Lightkurve Collaboration. 2018, Lightkurve: Kepler and TESS time series analysis in Python, Astrophysics Sou...
-
[10]
2019, in Advances in Neural Information Processing Systems 32, 8024–8035
Paszke, A., Gross, S., Massa, F., et al. 2019, in Advances in Neural Information Processing Systems 32, 8024–8035
2019
-
[11]
2014, Experimental Astronomy, 38, 249, doi: 10.1007/s10686-014-9383-4
Rauer, H., Catala, C., Aerts, C., et al. 2014, Experimental Astronomy, 38, 249, doi: 10.1007/s10686-014-9383-4
-
[12]
Ricker, G. R., Winn, J. N., Vanderspek, R., et al. 2015, Journal of Astronomical Telescopes, Instruments, and Systems, 1, 014003, doi: 10.1117/1.JATIS.1.1.014003
work page internal anchor Pith review doi:10.1117/1.jatis.1.1.014003 2015
-
[13]
Journal of the American Statistical Association , author =
Rousseeuw, P. J., & Croux, C. 1993, Journal of the American Statistical Association, 88, 1273, doi: 10.1080/01621459.1993.10476408
-
[14]
Tukey, J. W. 1977, Exploratory Data Analysis (Addison-Wesley)
1977
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.