Learning interpretable and stable dynamical models via mixed-integer Lyapunov-constrained optimization
Pith reviewed 2026-05-10 16:55 UTC · model grok-4.3
The pith
Enforcing Lyapunov conditions via mixed-integer constraints allows learning interpretable stable dynamical models from data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that jointly optimizing a basis-function model of the dynamics and its associated Lyapunov function, subject to Lyapunov decrease constraints on the data points, yields stable and interpretable dynamical models. The resulting mixed-integer program can be solved exactly, ensuring the learned model satisfies the stability criteria by construction.
What carries the argument
Basis-function parameterization of the differential equations and Lyapunov function, combined with mixed-integer quadratic constraints that enforce the Lyapunov conditions at training points.
If this is right
- The method recovers the exact true model and Lyapunov function in the noise-free case.
- Models learned with the Lyapunov constraints show higher predictive accuracy than unconstrained models when data contains noise.
- The explicit basis expansion provides an interpretable form for both the dynamics and the stability certificate.
- Global optimization of the mixed-integer problem guarantees that the solution satisfies the stability conditions if feasible.
Where Pith is reading between the lines
- The same framework could be applied to learn models with multiple equilibria by using more general Lyapunov-like functions.
- Incorporating sparsity-inducing terms in the optimization might allow automatic selection of basis functions from a large library.
- Testing the learned models on unseen trajectories far from training data would verify if the local constraints generalize to global stability.
Load-bearing premise
The true dynamics and Lyapunov function admit an accurate representation via the chosen basis functions, and that enforcing the Lyapunov conditions only on the finite set of training points is sufficient to guarantee stability over the entire state space.
What would settle it
Applying the method to a known stable system with an incomplete basis set and observing that the learned model produces diverging trajectories from initial conditions outside the training data would falsify the stability guarantee.
Figures

read the original abstract
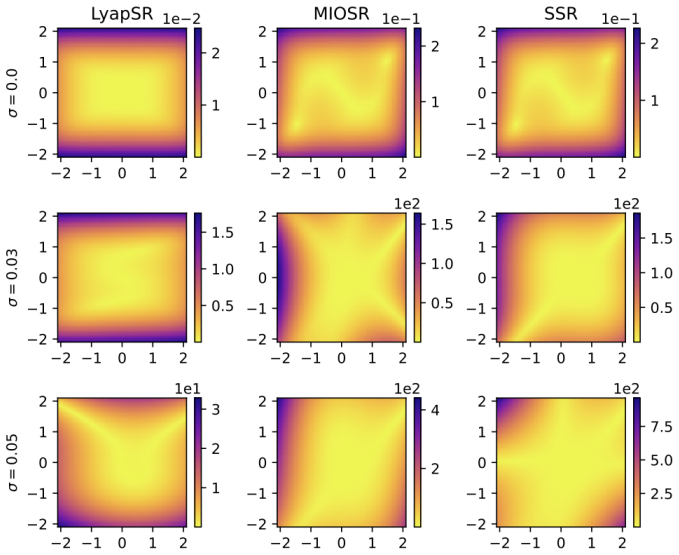
In this paper, we consider the data-driven discovery of stable dynamical models with a single equilibrium. The proposed approach uses a basis-function parameterization of the differential equations and the associated Lyapunov function. This modeling approach enables the discovery of both the dynamical model and a Lyapunov function in an interpretable form. The Lyapunov conditions for stability are enforced as constraints on the training data. The resulting learning task is a mixed-integer quadratically constrained optimization problem that can be solved to optimality using current state-of-the-art global optimization solvers. Application to two case studies shows that the proposed approach can discover the true model of the system and the associated Lyapunov function. Moreover, in the presence of noise, the model learned with the proposed approach achieves higher predictive accuracy than models learned with baselines that do not consider Lyapunov-related constraints.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a data-driven method for discovering stable dynamical models with a single equilibrium. It parameterizes both the vector field f and a Lyapunov function V using basis functions, then enforces the Lyapunov stability conditions (V(x_i) > 0 and ∇V(x_i)^T f(x_i) < 0) as constraints on a finite set of training samples. This yields a mixed-integer quadratically constrained quadratic program (MIQCQP) solved to global optimality with off-the-shelf solvers. On two case studies the method recovers the true model and associated Lyapunov function; under noise it yields higher predictive accuracy than baselines that omit the Lyapunov constraints.
Significance. If the central claims hold, the work would be significant for offering an interpretable, optimization-based route to learning stable models directly from data rather than post-hoc stabilization. The combination of basis-function representations with global MIQCQP solvers and explicit noise-robustness demonstrations in the case studies are concrete strengths. The approach addresses a practical need in systems identification and control where stability must be guaranteed rather than verified after learning.
major comments (2)
- The Lyapunov conditions are enforced only at the finite training points x_i (as stated in the abstract: 'The Lyapunov conditions for stability are enforced as constraints on the training data'). For nonlinear continuous-time systems this supplies only a necessary condition at those samples; without a sum-of-squares or other global certificate on the chosen basis, the inequalities are not guaranteed to hold over the entire state space. This directly affects the claim of learning 'stable dynamical models,' especially under noise where the recovered coefficients are approximate. The manuscript should either add a global certificate or provide post-hoc verification (dense grid evaluation or long-horizon simulation) that the learned model remains stable outside the training set.
- The abstract asserts that the method 'can discover the true model of the system and the associated Lyapunov function' and achieves 'higher predictive accuracy' under noise, yet no explicit quantitative metrics (parameter recovery error, prediction RMSE, or stability margin outside training points) are supplied in the provided description. The case-study results therefore cannot be assessed for effect size or statistical significance relative to the baselines.
minor comments (1)
- The manuscript should specify the exact basis functions employed, the criteria used to select them, and any assumptions on their ability to represent the true dynamics and Lyapunov function.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive feedback. The comments highlight important aspects of the stability guarantees and the presentation of results. We address each major comment below and will revise the manuscript to incorporate additional verification and quantitative metrics.
read point-by-point responses
-
Referee: The Lyapunov conditions are enforced only at the finite training points x_i (as stated in the abstract: 'The Lyapunov conditions for stability are enforced as constraints on the training data'). For nonlinear continuous-time systems this supplies only a necessary condition at those samples; without a sum-of-squares or other global certificate on the chosen basis, the inequalities are not guaranteed to hold over the entire state space. This directly affects the claim of learning 'stable dynamical models,' especially under noise where the recovered coefficients are approximate. The manuscript should either add a global certificate or provide post-hoc verification (dense grid evaluation or long-horizon simulation) that the learned model remains stable outside the training set.
Authors: We agree that the Lyapunov conditions enforced only at the finite training samples constitute a necessary but not sufficient condition for global asymptotic stability of the continuous-time nonlinear system. The method relies on the basis-function parameterization together with global optimality of the MIQCQP to recover models that satisfy the conditions at the data points and, in the noise-free case studies, recover the true stable model exactly. To strengthen the claims, we will add post-hoc verification in the revised manuscript: (i) dense-grid evaluation of V(x) > 0 and dot{V}(x) < 0 over a fine discretization of the relevant state-space region, and (ii) long-horizon forward simulations from initial conditions outside the training set to confirm that trajectories converge to the equilibrium. We note that a global certificate (e.g., via sum-of-squares) would require a different basis and constraint formulation and is left for future work. revision: yes
-
Referee: The abstract asserts that the method 'can discover the true model of the system and the associated Lyapunov function' and achieves 'higher predictive accuracy' under noise, yet no explicit quantitative metrics (parameter recovery error, prediction RMSE, or stability margin outside training points) are supplied in the provided description. The case-study results therefore cannot be assessed for effect size or statistical significance relative to the baselines.
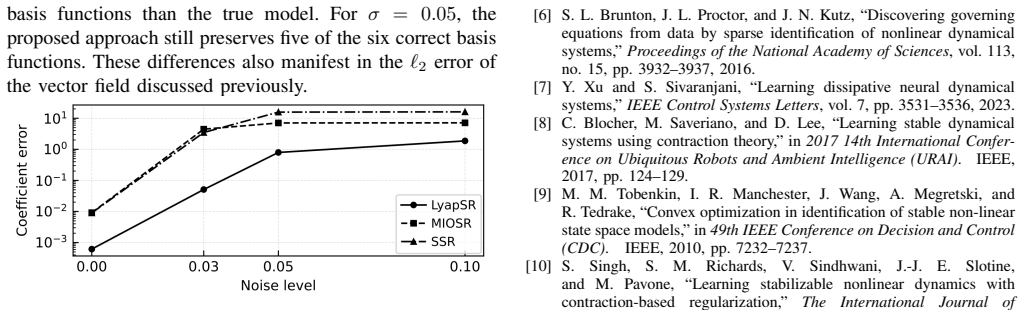
Authors: The full manuscript presents the case-study outcomes with explicit quantitative comparisons. In the noise-free setting the recovered coefficients match the ground-truth model and Lyapunov function exactly (zero parameter error). Under additive noise we report prediction RMSE on held-out trajectories and show that the Lyapunov-constrained models outperform the unconstrained baselines. To improve clarity and allow direct assessment of effect size, we will add a dedicated results table in the revised manuscript that includes: parameter recovery error (L2 norm), trajectory prediction RMSE with standard deviation over multiple noise realizations, and stability margins (minimum of -dot{V} on a dense test grid) together with direct numerical comparison to the baselines. revision: yes
Circularity Check
No circularity: standard parameterization and optimization with independent Lyapunov constraints
full rationale
The paper parameterizes both the vector field f and candidate Lyapunov function V via user-chosen basis functions, then encodes the Lyapunov inequalities V(x_i) > 0 and ∇V(x_i)^T f(x_i) < 0 directly as MIQCQP constraints evaluated only at the finite training samples. The resulting program is solved to global optimality by an off-the-shelf solver; the recovered coefficients are therefore the solution to an explicitly posed, externally verifiable optimization problem rather than a quantity defined in terms of itself. No step renames a fitted quantity as a prediction, imports a uniqueness theorem from the authors' prior work, or smuggles an ansatz via self-citation. The case-study success when the basis spans the true model is a direct consequence of the formulation, not a circular reduction.
Axiom & Free-Parameter Ledger
free parameters (1)
- Basis function coefficients
axioms (2)
- standard math Lyapunov stability theorem for systems with a single equilibrium
- domain assumption Dynamics and Lyapunov function admit basis-function parameterization
Reference graph
Works this paper leans on
-
[1]
H. K. Khalil and J. W. Grizzle,Nonlinear systems. Prentice hall Upper Saddle River, NJ, 2002, vol. 3
work page 2002
-
[2]
L. Ljung, “System identification,” inSignal analysis and prediction. Springer, 1998, pp. 163–173
work page 1998
-
[3]
Z. Wu, D. Rincon, and P. D. Christofides, “Process structure-based recurrent neural network modeling for model predictive control of nonlinear processes,”Journal of Process Control, vol. 89, pp. 74–84, 2020
work page 2020
-
[4]
B. Amos, L. Xu, and J. Z. Kolter, “Input convex neural networks,” inInternational conference on machine learning. PMLR, 2017, pp. 146–155
work page 2017
-
[5]
Learning symbolic representations of hybrid dynamical systems,
D. L. Ly and H. Lipson, “Learning symbolic representations of hybrid dynamical systems,”The Journal of Machine Learning Research, vol. 13, no. 1, pp. 3585–3618, 2012
work page 2012
-
[6]
Discovering governing equations from data by sparse identification of nonlinear dynamical systems,
S. L. Brunton, J. L. Proctor, and J. N. Kutz, “Discovering governing equations from data by sparse identification of nonlinear dynamical systems,”Proceedings of the National Academy of Sciences, vol. 113, no. 15, pp. 3932–3937, 2016
work page 2016
-
[7]
Learning dissipative neural dynamical systems,
Y . Xu and S. Sivaranjani, “Learning dissipative neural dynamical systems,”IEEE Control Systems Letters, vol. 7, pp. 3531–3536, 2023
work page 2023
-
[8]
Learning stable dynamical systems using contraction theory,
C. Blocher, M. Saveriano, and D. Lee, “Learning stable dynamical systems using contraction theory,” in2017 14th International Confer- ence on Ubiquitous Robots and Ambient Intelligence (URAI). IEEE, 2017, pp. 124–129
work page 2017
-
[9]
Convex optimization in identification of stable non-linear state space models,
M. M. Tobenkin, I. R. Manchester, J. Wang, A. Megretski, and R. Tedrake, “Convex optimization in identification of stable non-linear state space models,” in49th IEEE Conference on Decision and Control (CDC). IEEE, 2010, pp. 7232–7237
work page 2010
-
[10]
Learning stabilizable nonlinear dynamics with contraction-based regularization,
S. Singh, S. M. Richards, V . Sindhwani, J.-J. E. Slotine, and M. Pavone, “Learning stabilizable nonlinear dynamics with contraction-based regularization,”The International Journal of Robotics Research, vol. 40, no. 10-11, pp. 1123–1150, 2021
work page 2021
-
[11]
Promoting global stability in data-driven models of quadratic nonlinear dynamics,
A. A. Kaptanoglu, J. L. Callaham, A. Aravkin, C. J. Hansen, and S. L. Brunton, “Promoting global stability in data-driven models of quadratic nonlinear dynamics,”Physical Review Fluids, vol. 6, no. 9, p. 094401, 2021
work page 2021
-
[12]
A constraint generation approach to learning stable linear dynamical systems,
B. Boots, G. J. Gordon, and S. Siddiqi, “A constraint generation approach to learning stable linear dynamical systems,”Advances in neural information processing systems, vol. 20, 2007
work page 2007
-
[13]
Learning stable nonlinear dynamical systems with gaussian mixture models,
S. M. Khansari-Zadeh and A. Billard, “Learning stable nonlinear dynamical systems with gaussian mixture models,”IEEE Transactions on Robotics, vol. 27, no. 5, pp. 943–957, 2011
work page 2011
-
[14]
Lyapunov-constrained hybrid modeling for stable parameter learning in nonlinear systems,
P. Shah and J. S.-I. Kwon, “Lyapunov-constrained hybrid modeling for stable parameter learning in nonlinear systems,”Industrial & Engineering Chemistry Research, 2025
work page 2025
-
[15]
Learning stable deep dynamics models,
J. Z. Kolter and G. Manek, “Learning stable deep dynamics models,” Advances in neural information processing systems, vol. 32, 2019
work page 2019
-
[16]
Almost surely stable deep dynamics,
N. Lawrence, P. Loewen, M. Forbes, J. Backstrom, and B. Gopaluni, “Almost surely stable deep dynamics,”Advances in neural information processing systems, vol. 33, pp. 18 942–18 953, 2020
work page 2020
-
[17]
Learning sta- ble deep dynamics models for partially observed or delayed dynamical systems,
A. Schlaginhaufen, P. Wenk, A. Krause, and F. Dorfler, “Learning sta- ble deep dynamics models for partially observed or delayed dynamical systems,”Advances in Neural Information Processing Systems, vol. 34, pp. 11 870–11 882, 2021
work page 2021
-
[18]
A. Yang, J. Xiong, M. Raginsky, and E. Rosenbaum, “Input-to- state stable neural ordinary differential equations with applications to transient modeling of circuits,” inLearning for Dynamics and Control Conference. PMLR, 2022, pp. 663–675
work page 2022
-
[19]
Neural lyapunov control of unknown nonlinear systems with stability guarantees,
R. Zhou, T. Quartz, H. De Sterck, and J. Liu, “Neural lyapunov control of unknown nonlinear systems with stability guarantees,”Advances in Neural Information Processing Systems, vol. 35, pp. 29 113–29 125, 2022
work page 2022
-
[20]
Lilad: Learning in-context lyapunov-stable adaptive dynamics models,
A. Jena, N. Li, and L. Xie, “Lilad: Learning in-context lyapunov-stable adaptive dynamics models,”arXiv preprint arXiv:2511.21846, 2025
-
[21]
Max- imum likelihood identification of stable linear dynamical systems,
J. Umenberger, J. W ˚agberg, I. R. Manchester, and T. B. Sch ¨on, “Max- imum likelihood identification of stable linear dynamical systems,” Automatica, vol. 96, pp. 280–292, 2018
work page 2018
-
[22]
Algorithms for verifying deep neural networks,
C. Liu, T. Arnon, C. Lazarus, C. Strong, C. Barrett, and M. J. Kochen- derfer, “Algorithms for verifying deep neural networks,”F oundations and Trends in Optimization, vol. 4, no. 3-4, pp. 244–404, 2021
work page 2021
-
[23]
Learning control lyapunov functions from counterexamples and demonstrations,
H. Ravanbakhsh and S. Sankaranarayanan, “Learning control lyapunov functions from counterexamples and demonstrations,”Autonomous Robots, vol. 43, no. 2, pp. 275–307, 2019
work page 2019
-
[24]
Gurobi Optimization, “GUROBI Optimizer 6.5,” 2015, http:// www.gurobi.com/
work page 2015
-
[25]
Sparse learning of stochastic dynamical equations,
L. Boninsegna, F. N ¨uske, and C. Clementi, “Sparse learning of stochastic dynamical equations,”The Journal of chemical physics, vol. 148, no. 24, 2018
work page 2018
-
[26]
Learning sparse nonlinear dynamics via mixed-integer optimization,
D. Bertsimas and W. Gurnee, “Learning sparse nonlinear dynamics via mixed-integer optimization,”Nonlinear Dynamics, vol. 111, no. 7, pp. 6585–6604, 2023
work page 2023
-
[27]
Pysindy: A comprehensive python package for robust sparse system identification,
A. A. Kaptanoglu, B. M. de Silva, U. Fasel, K. Kaheman, A. J. Goldschmidt, J. Callaham, C. B. Delahunt, Z. G. Nicolaou, K. Champion, J.-C. Loiseau, J. N. Kutz, and S. L. Brunton, “Pysindy: A comprehensive python package for robust sparse system identification,”Journal of Open Source Software, vol. 7, no. 69, p. 3994, 2022. [Online]. Available: https://doi...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.