Recognition: unknown
SEARL: Joint Optimization of Policy and Tool Graph Memory for Self-Evolving Agents
Pith reviewed 2026-05-10 17:22 UTC · model grok-4.3
The pith
SEARL constructs a tool graph memory from trajectories that integrates planning and execution to generalize tool reuse and densify sparse rewards.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
SEARL jointly optimizes the agent's policy together with a tool graph memory built from interaction trajectories. The memory supplies a novel state abstraction that supports generalization across analogous contexts, such as reusing the same tool in new situations, while inter-trajectory correlations convert sparse outcome rewards into denser training signals, allowing agents to extract explicit knowledge from history without depending on large-scale LLMs or multi-agent systems.
What carries the argument
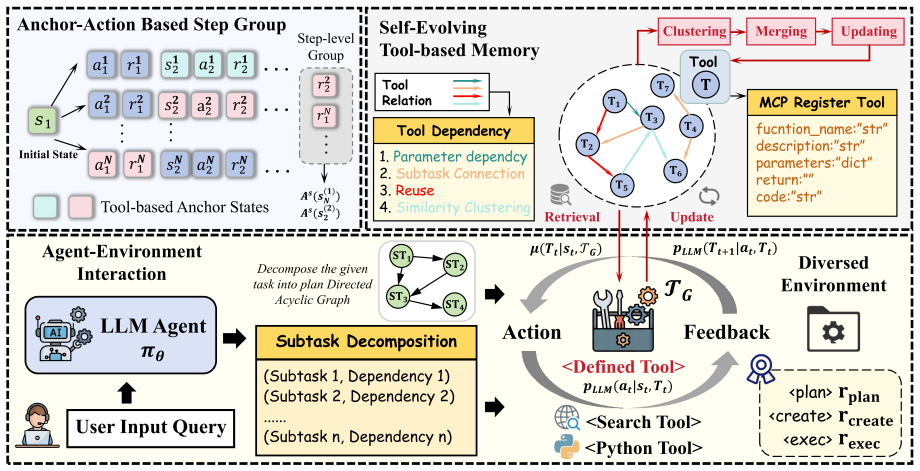
Tool graph memory: a structured representation of tools and their relational usage patterns extracted from trajectories, jointly optimized with the policy to link planning and execution for abstraction and reward densification.
If this is right
- Agents extract explicit reusable knowledge from historical trajectories rather than treating each interaction in isolation.
- Inter-trajectory correlations provide additional reward signals that accelerate learning under outcome-only feedback.
- The framework achieves effective self-evolution on knowledge reasoning and mathematics tasks in resource-constrained environments.
- Joint policy and memory optimization enables tool reuse across analogous contexts without external scaffolding.
Where Pith is reading between the lines
- Smaller base models could handle more complex multi-step agent tasks if the memory structure compensates for limited reasoning capacity.
- The same graph construction might extend to domains like code generation or web navigation where repeated tool patterns appear across episodes.
- If the graph encodes causal dependencies between tools, it could improve robustness when environment dynamics change.
Load-bearing premise
That building a tool graph memory from past interaction trajectories will reliably turn sparse final rewards into denser learning signals and support generalization to similar tasks without needing larger models or multiple agents.
What would settle it
A direct comparison on the same reasoning or math benchmarks showing that SEARL produces no measurable gain in task success rate or sample efficiency over standard RLVR baselines when using identical base model sizes and single-agent setups.
Figures




read the original abstract
Recent advances in Reinforcement Learning with Verifiable Rewards (RLVR) have demonstrated significant potential in single-turn reasoning tasks. With the paradigm shift toward self-evolving agentic learning, models are increasingly expected to learn from trajectories by synthesizing tools or accumulating explicit experiences. However, prevailing methods typically rely on large-scale LLMs or multi-agent frameworks, which hinder their deployment in resource-constrained environments. The inherent sparsity of outcome-based rewards also poses a substantial challenge, as agents typically receive feedback only upon completion of tasks. To address these limitations, we introduce a Tool-Memory based self-evolving agentic framework SEARL. Unlike approaches that directly utilize interaction experiences, our method constructs a structured experience memory that integrates planning with execution. This provides a novel state abstraction that facilitates generalization across analogous contexts, such as tool reuse. Consequently, agents extract explicit knowledge from historical data while leveraging inter-trajectory correlations to densify reward signals. We evaluate our framework on knowledge reasoning and mathematics tasks, demonstrating its effectiveness in achieving more practical and efficient learning.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces SEARL, a Tool-Memory based self-evolving agentic framework for RLVR. It constructs a structured experience memory from interaction trajectories that integrates planning with execution, providing a novel state abstraction to facilitate generalization across analogous contexts such as tool reuse. Agents are said to extract explicit knowledge from historical data while leveraging inter-trajectory correlations to densify sparse outcome-based rewards. The framework is evaluated on knowledge reasoning and mathematics tasks and is positioned as enabling effective self-evolving agents without large-scale LLMs or multi-agent systems.
Significance. If the empirical claims hold, the work could provide a practical path toward efficient self-evolving agents in resource-constrained settings by using tool-graph memory for state abstraction and reward densification. The joint optimization of policy and memory is a potentially useful direction for agentic learning that avoids heavy reliance on external frameworks.
major comments (2)
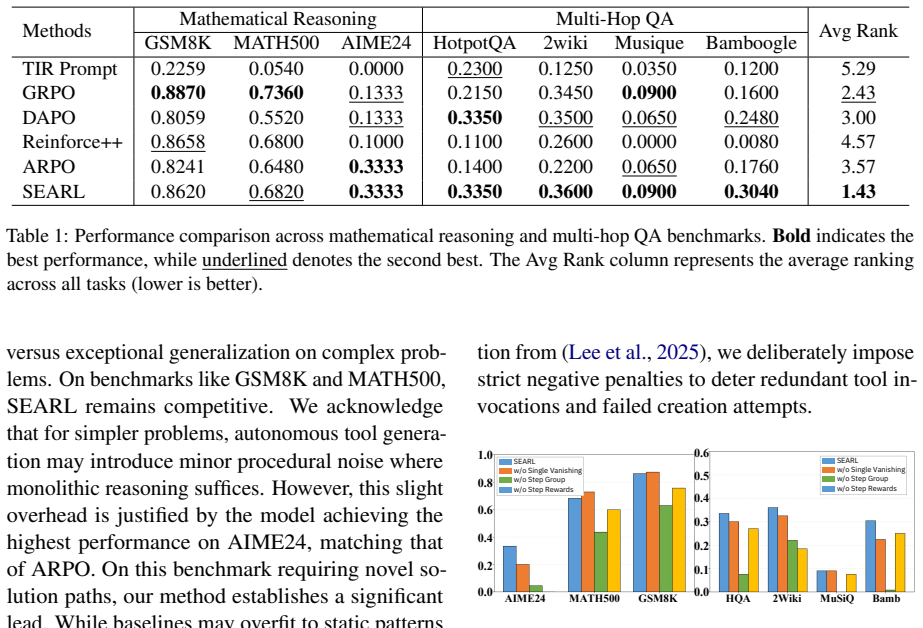
- [Abstract/Evaluation] Abstract and evaluation description: the paper asserts effectiveness on reasoning and mathematics tasks but supplies no metrics, baselines, ablation studies, or experimental setup details to substantiate the central claims of reward densification and generalization via the tool graph memory.
- [Method] Method section: the construction of the tool graph memory, the integration of planning and execution, and the mechanism for leveraging inter-trajectory correlations are described at a high level without equations, algorithms, or formal definitions, leaving the novelty of the state abstraction and its claimed benefits without mathematical grounding or reproducibility details.
minor comments (2)
- [Abstract] The abstract would be strengthened by including at least one key quantitative result or comparison to convey the scale of improvement.
- [Method] Consider adding a diagram or pseudocode for the tool graph memory update and joint optimization procedure to improve clarity.
Simulated Author's Rebuttal
We thank the referee for the detailed and constructive review. We address each major comment below and will incorporate revisions to strengthen the manuscript's clarity, formality, and completeness.
read point-by-point responses
-
Referee: [Abstract/Evaluation] Abstract and evaluation description: the paper asserts effectiveness on reasoning and mathematics tasks but supplies no metrics, baselines, ablation studies, or experimental setup details to substantiate the central claims of reward densification and generalization via the tool graph memory.
Authors: We acknowledge that the abstract provides only a high-level summary of the evaluation without quantitative metrics or setup details. The full manuscript includes experimental results on knowledge reasoning and mathematics tasks demonstrating effectiveness, but to directly address this concern we will revise the abstract to include key performance indicators (e.g., success rate improvements) and expand the evaluation section with explicit baselines, ablation studies (such as variants without the tool graph memory), experimental hyperparameters, and quantitative evidence supporting reward densification via inter-trajectory correlations and generalization through state abstraction. revision: yes
-
Referee: [Method] Method section: the construction of the tool graph memory, the integration of planning and execution, and the mechanism for leveraging inter-trajectory correlations are described at a high level without equations, algorithms, or formal definitions, leaving the novelty of the state abstraction and its claimed benefits without mathematical grounding or reproducibility details.
Authors: We agree that the method description would benefit from greater formality and detail. In the revised manuscript we will introduce formal definitions and equations for the tool graph memory construction, the state abstraction mechanism, and the reward densification process based on inter-trajectory correlations. We will also add an algorithm box outlining the joint optimization of policy and memory, along with explicit steps for integrating planning and execution phases, to provide mathematical grounding and ensure reproducibility. revision: yes
Circularity Check
No significant circularity
full rationale
The provided abstract and description contain no equations, derivations, fitted parameters, or predictions. The framework is introduced descriptively as a novel state abstraction via tool graph memory, with claims about generalization and reward densification, but these are not shown to reduce to inputs by construction. No self-citations, ansatzes, or uniqueness theorems are invoked in the text. The derivation chain is absent, making the paper self-contained at the descriptive level with no load-bearing circular steps.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Agents receive only sparse outcome-based rewards upon task completion
- ad hoc to paper Structured experience memory enables better state abstraction and inter-trajectory correlations
invented entities (1)
-
Tool Graph Memory
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Rlfactory: A plug-and-play reinforcement learning post-training framework for llm multi-turn tool-use.Preprint, arXiv:2509.06980. Guanting Dong, Yifei Chen, Xiaoxi Li, Jiajie Jin, Hongjin Qian, Yutao Zhu, Hangyu Mao, Guorui Zhou, Zhicheng Dou, and Ji-Rong Wen. 2025a. Tool-star: Empowering llm-brained multi-tool rea- soner via reinforcement learning.arXiv ...
-
[2]
Group-in-Group Policy Optimization for LLM Agent Training
Group-in-group policy optimization for llm agent training.arXiv preprint arXiv:2505.10978. Huan-ang Gao, Jiayi Geng, Wenyue Hua, Mengkang Hu, Xinzhe Juan, Hongzhang Liu, Shilong Liu, Jiahao Qiu, Xuan Qi, Yiran Wu, and 1 others. 2025a. A survey of self-evolving agents: On path to artificial super intelligence.arXiv preprint arXiv:2507.21046. Jiaxuan Gao, W...
work page internal anchor Pith review arXiv 2025
-
[3]
Let’s verify step by step. InThe Twelfth Inter- national Conference on Learning Representations. Jiaye Lin, Yifu Guo, Yuzhen Han, Sen Hu, Ziyi Ni, Licheng Wang, Mingguang Chen, Daxin Jiang, Binx- ing Jiao, Chen Hu, and 1 others. 2025. Se-agent: Self-evolution trajectory optimization in multi-step reasoning with llm-based agents.arXiv preprint arXiv:2508.0...
-
[4]
WebArena: A Realistic Web Environment for Building Autonomous Agents
Webarena: A realistic web environment for building autonomous agents.arXiv preprint arXiv:2307.13854. Yifei Zhou, Sergey Levine, Jason Weston, Xian Li, and Sainbayar Sukhbaatar. 2025. Self- challenging language model agents.arXiv preprint arXiv:2506.01716. Yuchen Zhuang, Di Jin, Jiaao Chen, Wenqi Shi, Hanrui Wang, and Chao Zhang. 2025. Workforceagent-r1: ...
work page internal anchor Pith review arXiv 2025
-
[5]
name": "create_and_execute_mcp
xxx. Previous is an example of generating subtasks, you are not required to solve the task within the plan itself; focus on outlining the steps. Always verify your answers before providing them, provide the plan for verifying. If you are uncertain about the task, you can plan for web search to gather more information. Now, write a plan below to solve the ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.