Recognition: unknown
Parametric Shortest Paths in a Linearly Interpolated Graph
Pith reviewed 2026-05-10 17:02 UTC · model grok-4.3
The pith
In graphs whose edge weights interpolate linearly between two fixed graphs, all distinct shortest paths over intervals of the parameter can be precomputed for logarithmic query time.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
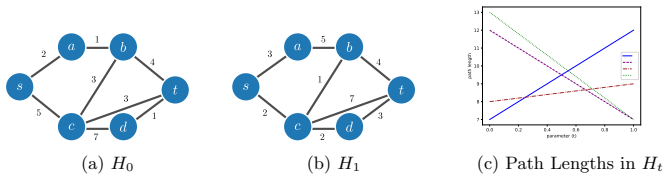
The authors present an algorithm that computes all distinct parametric shortest paths in the interpolated graph family (1−λ)G0 + λG1. Each path is optimal over a maximal subinterval of [0,1] and corresponds to a linear cost function in that interval. The algorithm constructs a data structure in Θ(k |E| log |V|) time, after which a shortest-path query for any given λ can be answered in Θ(log k) time.
What carries the argument
The enumeration of maximal λ-intervals on which a single path remains shortest, found by comparing the linear cost functions of candidate paths across the parameter range.
Load-bearing premise
Edge weights stay positive in both endpoint graphs so that shortest paths remain well-defined for every interpolation value between them.
What would settle it
A counterexample pair of small graphs in which the computed structure either reports a path that is not shortest for some λ inside one of its claimed intervals or misses an interval where a different path becomes optimal.
Figures

read the original abstract
We consider the parametric shortest paths problem in a linearly interpolated graph. Given two positively-weighted directed graphs $G_0=(V,E,\omega_0)$ and $G_1=(V,E,\omega_1),$ the linearly interpolated graph is the family of graphs $(1-\lambda)G_0+\lambda G_1$, parameterized by $\lambda\in [0,1]$. The problem is to compute all distinct parametric shortest paths. We compute a data structure in $\Theta(k|E|\log |V|)$ time, where~$k$ is the number of distinct parametric shortest paths over all~$\lambda\in [0,1]$ that exist for a nontrivial interval of parameters, each corresponding to a linear function in a maximal sub-interval of $[0,1]$. Using this data structure, a shortest path query takes~$\Theta(\log k)$ time.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper considers the parametric shortest paths problem in a linearly interpolated graph given by two positively-weighted directed graphs G0 and G1. It computes a data structure in Θ(k|E|log |V|) time, where k is the number of distinct parametric shortest paths that exist for nontrivial intervals of λ in [0,1], each corresponding to a linear function on a maximal sub-interval. This data structure allows shortest path queries for any λ to be answered in Θ(log k) time.
Significance. If the result holds, it provides an efficient output-sensitive method for parametric shortest path queries, which is valuable in applications involving parameter-dependent networks. The use of positive weights ensures the applicability of standard algorithms without negative cycles. The output-sensitive complexity is a strength, as it depends on the actual number of distinct paths rather than a worst-case bound.
minor comments (2)
- [Abstract] The abstract states the preprocessing time bound explicitly but does not mention the space complexity of the resulting data structure; this should be added for completeness.
- A brief discussion or example early in the paper illustrating how linear interpolation preserves positivity and avoids negative cycles would strengthen the presentation of the model assumptions.
Simulated Author's Rebuttal
We thank the referee for the positive assessment of our work and the recommendation for minor revision. We are pleased that the output-sensitive complexity and its potential applications are recognized as strengths.
Circularity Check
No circularity: standard output-sensitive algorithmic construction
full rationale
The paper presents a constructive algorithm whose running time is stated directly as Θ(k|E|log |V|), where k counts the number of maximal intervals on which a single path remains shortest. This is an output-sensitive bound derived from standard shortest-path primitives (Dijkstra on non-negative weights) applied across breakpoints; k is defined as the size of the output, not fitted or presupposed. No self-citation is load-bearing for the complexity claim, no ansatz is smuggled, and the derivation does not reduce any equation to itself by construction. The positive-weight assumption on G0 and G1 is external and ensures the interpolated graphs remain valid inputs for the same primitives.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The input graphs are directed with positive edge weights.
Reference graph
Works this paper leans on
-
[1]
Guibas, and Monika R
Pankaj Agarwal, David Eppstein, Leonidas J. Guibas, and Monika R. Henzinger. Parametric and kinetic minimum spanning trees. InProceed- ings 39th Annual Symposium on Foundations of Computer Science (Cat. No.98CB36280), pages 596–605, 1998
1998
-
[2]
On a routing problem.Quarterly of applied mathematics, 16(1):87–90, 1958
Richard Bellman. On a routing problem.Quarterly of applied mathematics, 16(1):87–90, 1958
1958
-
[3]
Two-phase alogrithms for the parametric shortest path problem
Sourav Chakraborty, Eldar Fisher, Oded Lachish, and Raphael Yuster. Two-phase alogrithms for the parametric shortest path problem. InPro- ceedings of the 27th International Symposium on Theoretical Aspects of Computer Science (STACS 2010),, volume 5, pages 167–178, 2010
2010
-
[4]
Dijkstra
Edsger W. Dijkstra. A note on two problems in connexion with graphs. Numerische Mathematik, 1(1):269–271, 1959
1959
-
[5]
A stronger lower bound on parametric minimum spanning trees
David Eppstein. A stronger lower bound on parametric minimum spanning trees. InAlgorithmica 85, pages 1738–1753, June 2023
2023
-
[6]
Maximum flows and parametric shortest paths in planar graphs
Jeff Erickson. Maximum flows and parametric shortest paths in planar graphs. InProceedings of the Twenty-First Annual ACM-SIAM Symposium on Discrete Algorithms, pages 794–804, 2010. 4
2010
-
[7]
Lester R. Ford Jr. Network flow theory. Technical report, Santa Monica, California, 1956. Paper P-923, RAND Corporation
1956
-
[8]
Parametric shortest paths in planar graphs
Kshitij Gajjar and Jaikumar Radhakrishnan. Parametric shortest paths in planar graphs. In2019 IEEE 60th Annual Symposium on Foundations of Computer Science (FOCS), pages 876–895, 2019
2019
-
[9]
Karp and James B
Richard M. Karp and James B. Orlin. Parametric shortest path algo- rithms with an application to cyclic staffing.Discrete Applied Mathematics, 3(1):37–45, 1981
1981
-
[10]
Young, Robert E
Neal E. Young, Robert E. Tarjant, and James B. Orlin. Faster parametric shortest path and minimum-balance algorithms.Networks, 21(2):205–221, 1991. A Modified Dijkstra’s We present two modified versions of dijkstra’s algorithm,DijkstraMinSlope(G, ω, δ, x, y) andDijkstraMaxSlope(G, ω, δ, x, y), that compute a shortest path represen- tative in the weighted ...
1991
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.