Recognition: unknown
Globally Optimal Pose from Orthographic Silhouettes
Pith reviewed 2026-05-10 16:54 UTC · model grok-4.3
The pith
Precomputed silhouette-area response surfaces allow globally optimal pose recovery from orthographic silhouettes alone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper claims that the continuity of silhouette area with rotation trajectories enables a branching search on a precomputed response surface, combined with auxiliary ellipse aspect ratio signatures, to recover the globally optimal pose from unoccluded orthographic silhouettes for any shape irrespective of convexity and genus.
What carries the argument
A pre-computed response surface of silhouette areas over rotation space, which supports resolution-guided candidate search by providing strong branching to narrow down possible poses.
If this is right
- Accurate pose estimation becomes possible using only binary silhouette images for complex 3D models.
- The method avoids failures common in correspondence-based approaches for non-convex or topologically complex shapes.
- Global optimality is achieved through systematic search rather than local optimization or heuristic matching.
- Computation remains practical because the area continuity allows coarse-to-fine refinement without exhaustive enumeration.
Where Pith is reading between the lines
- The response surface idea might apply to other continuous projection properties, such as silhouette perimeter, for hybrid signatures.
- In practice, this could support real-time applications in augmented reality if surfaces are precomputed for multiple objects.
- The orthographic assumption suggests a potential extension by incorporating camera calibration to handle mild perspective effects.
Load-bearing premise
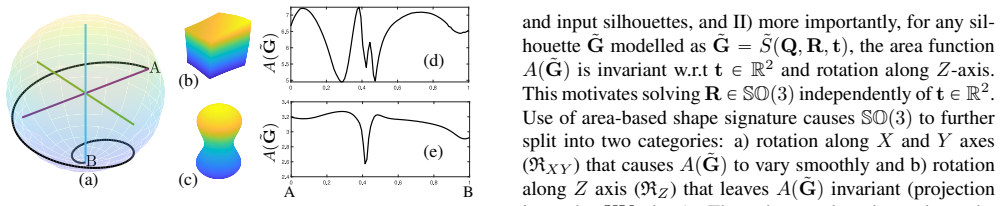
Silhouette areas vary continuously across rotation trajectories and inputs are perfect unoccluded orthographic projections.
What would settle it
Finding a shape and rotation where the measured silhouette area does not correspond to the global peak on the response surface, causing the guided search to converge to an incorrect pose.
Figures





read the original abstract
We solve the problem of determining the pose of known shapes in $\mathbb{R}^3$ from their unoccluded silhouettes. The pose is determined up to global optimality using a simple yet under-explored property of the area-of-silhouette: its continuity w.r.t trajectories in the rotation space. The proposed method utilises pre-computed silhouette-signatures, modelled as a response surface of the area-of-silhouettes. Querying this silhouette-signature response surface for pose estimation leads to a strong branching of the rotation search space, making resolution-guided candidate search feasible. Additionally, we utilise the aspect ratio of 2D ellipses fitted to projected silhouettes as an auxiliary global shape signature to accelerate the pose search. This combined strategy forms the first method to efficiently estimate globally optimal pose from just the silhouettes, without being guided by correspondences, for any shape, irrespective of its convexity and genus. We validate our method on synthetic and real examples, demonstrating significantly improved accuracy against comparable approaches. Code, data, and supplementary in: https://agnivsen.github.io/pose-from-silhouette/
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims to solve for the globally optimal 3D pose of a known shape from a single unoccluded orthographic silhouette by exploiting the continuity of the projected area function over SO(3). It precomputes a silhouette-area response surface (termed a 'silhouette-signature'), performs resolution-guided branching search over this surface, and augments the search with the aspect ratio of an ellipse fitted to the silhouette. The method is asserted to be the first correspondence-free approach that works for arbitrary shapes irrespective of convexity or genus, with validation on synthetic and real data showing improved accuracy over prior methods.
Significance. If the global-optimality guarantee can be established, the work would be significant: it offers a practical, correspondence-free pipeline that leverages a simple geometric invariant (silhouette area continuity) together with precomputed signatures and auxiliary ellipse features. This could broaden applicability in vision tasks where feature matching is unreliable. The precomputation-plus-branching strategy is a concrete algorithmic contribution that merits attention if the discretization error is provably controlled.
major comments (2)
- [Abstract and §3 (method)] The central claim of global optimality (abstract and §3) rests on resolution-guided search over the precomputed area response surface. However, no Lipschitz constant, modulus of continuity, or branch-and-bound pruning argument is supplied to bound the discretization error; for non-convex or high-genus shapes the area map can possess multiple local maxima and steep gradients, so the discrete search may return a local rather than global solution. This is load-bearing for the 'globally optimal' assertion.
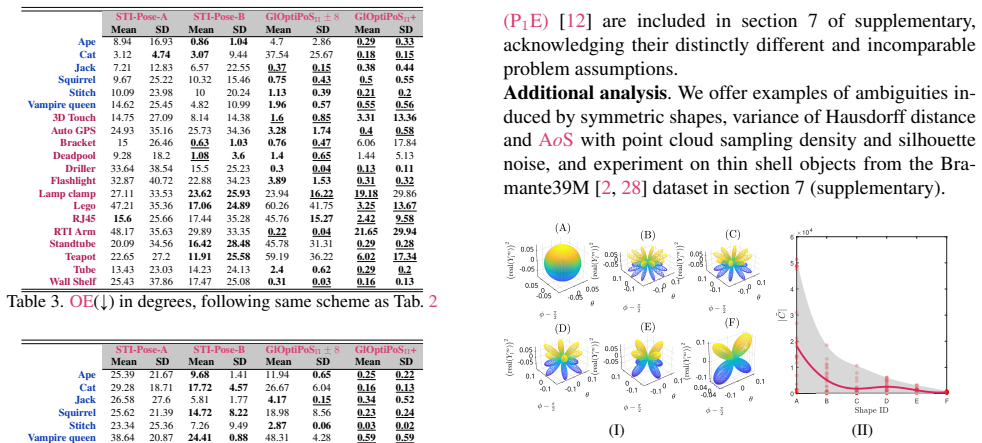
- [§4] §4 (validation) reports improved accuracy on synthetic and real examples, yet the manuscript provides neither quantitative error tables (e.g., mean angular error, success rate at 5°/10° thresholds) nor an ablation isolating the contribution of the area surface versus the ellipse auxiliary. Without these metrics it is impossible to verify whether the results actually support the global-optimality claim over local baselines.
minor comments (2)
- [§2–3] Notation for the rotation parameterization and the precise definition of the 'silhouette-signature' response surface should be introduced with an equation in §2 or §3 rather than left implicit.
- [§3] The supplementary material link is given, but the main text should state the exact resolution used for the precomputed surface and the branching criterion (e.g., area threshold or gradient magnitude) so that the method is reproducible from the paper alone.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below, clarifying the method's reliance on continuity and empirical validation while indicating planned revisions to strengthen the presentation.
read point-by-point responses
-
Referee: [Abstract and §3 (method)] The central claim of global optimality (abstract and §3) rests on resolution-guided search over the precomputed area response surface. However, no Lipschitz constant, modulus of continuity, or branch-and-bound pruning argument is supplied to bound the discretization error; for non-convex or high-genus shapes the area map can possess multiple local maxima and steep gradients, so the discrete search may return a local rather than global solution. This is load-bearing for the 'globally optimal' assertion.
Authors: We acknowledge that the manuscript does not supply a formal Lipschitz constant, modulus of continuity, or explicit branch-and-bound analysis to provably bound discretization error. The approach instead exploits the continuity of the projected-area function over SO(3) to enable a resolution-guided branching search over the precomputed silhouette-signature surface; the auxiliary ellipse aspect ratio is used to further prune candidates. While this strategy does not constitute a rigorous guarantee against local maxima for every non-convex or high-genus shape, the exhaustive nature of the precomputed surface at successively finer resolutions, combined with the auxiliary feature, is intended to locate the global solution in practice. We will revise §3 to expand the discussion of how continuity induces branching and to note the empirical character of the global-optimality claim for complex shapes. revision: partial
-
Referee: [§4] §4 (validation) reports improved accuracy on synthetic and real examples, yet the manuscript provides neither quantitative error tables (e.g., mean angular error, success rate at 5°/10° thresholds) nor an ablation isolating the contribution of the area surface versus the ellipse auxiliary. Without these metrics it is impossible to verify whether the results actually support the global-optimality claim over local baselines.
Authors: We agree that the validation section would benefit from more rigorous quantitative reporting. The current experiments demonstrate improved accuracy over prior methods on both synthetic and real data, but we will augment §4 with tables of mean angular error, success rates at 5° and 10° thresholds, and an ablation study that isolates the silhouette-signature response surface from the ellipse aspect-ratio auxiliary. These additions will make the empirical support for the method's performance and global-optimality behavior explicit and comparable to local baselines. revision: yes
Circularity Check
No circularity: algorithmic search on precomputed response surface is self-contained
full rationale
The paper presents a computational method that precomputes a response surface of silhouette areas over rotation space, then performs resolution-guided search exploiting the known continuity of projected area under orthographic projection. No equation or claim reduces the estimated pose to a fitted parameter defined from the target data, nor does any load-bearing step rely on a self-citation that itself assumes the result. The global-optimality assertion follows from the search procedure on the discrete surface rather than from a definitional identity or ansatz smuggled via prior work. Validation on synthetic and real examples supplies an external check independent of the derivation. This is a standard non-circular algorithmic contribution in computational geometry.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The area of the silhouette is continuous with respect to trajectories in the rotation space.
Reference graph
Works this paper leans on
-
[1]
Dronepose: photo- realistic uav-assistant dataset synthesis for 3d pose estima- tion via a smooth silhouette loss
Georgios Albanis, Nikolaos Zioulis, Anastasios Dimou, Dimitrios Zarpalas, and Petros Daras. Dronepose: photo- realistic uav-assistant dataset synthesis for 3d pose estima- tion via a smooth silhouette loss. InComputer Vision–ECCV 2020 Workshops: Glasgow, UK, August 23–28, 2020, Pro- ceedings, Part II 16, pages 663–681. Springer, 2020. 1
2020
-
[2]
Camera pose in sft and nrsfm under isometric and weaker deformation models
Adrien Bartoli and Agniva Sengupta. Camera pose in sft and nrsfm under isometric and weaker deformation models. Computer Vision and Image Understanding, page 104488,
-
[3]
Least squares fitting of ellipsoid using orthogonal distances.Boletim de ciências geodésicas, 21(2): 329–339, 2015
Sebahattin Bektas. Least squares fitting of ellipsoid using orthogonal distances.Boletim de ciências geodésicas, 21(2): 329–339, 2015. 5
2015
-
[4]
Depth Pro: Sharp Monocular Metric Depth in Less Than a Second
Aleksei Bochkovskii, Amaël Delaunoy, Hugo Germain, Marcel Santos, Yichao Zhou, Stephan R. Richter, and Vladlen Koltun. Depth pro: Sharp monocular metric depth in less than a second. InInternational Conference on Learn- ing Representations, 2025. URLhttps://arxiv.org/ abs/2410.02073. 5
work page internal anchor Pith review arXiv 2025
-
[5]
Boumal, B
N. Boumal, B. Mishra, P.-A. Absil, and R. Sepulchre. Manopt, a Matlab toolbox for optimization on manifolds. Journal of Machine Learning Research, 15(42):1455–1459,
-
[6]
URLhttps://www.manopt.org. 5
-
[7]
Jixiang Chen, Jing Chen, Kai Liu, Haochen Chang, Shan- feng Fu, and Jian Yang. Robust 6dof pose tracking consid- ering contour and interior correspondence uncertainty for ar assembly guidance.arXiv preprint arXiv:2502.11971, 2025. 1, 2
-
[8]
Augmented reality guided laparoscopic surgery of the uterus.IEEE Transactions on Medical Imag- ing, 40(1):371–380, 2020
Toby Collins, Daniel Pizarro, Simone Gasparini, Nicolas Bourdel, Pauline Chauvet, Michel Canis, Lilian Calvet, and Adrien Bartoli. Augmented reality guided laparoscopic surgery of the uterus.IEEE Transactions on Medical Imag- ing, 40(1):371–380, 2020. 1
2020
-
[9]
Efficient and flexible sampling with blue noise properties of triangular meshes.IEEE transactions on visualization and computer graphics, 18(6):914–924, 2012
Massimiliano Corsini, Paolo Cignoni, and Roberto Scopigno. Efficient and flexible sampling with blue noise properties of triangular meshes.IEEE transactions on visualization and computer graphics, 18(6):914–924, 2012. 2
2012
-
[10]
Silhouette-based 6d object pose estimation
Xiao Cui, Nan Li, Chi Zhang, Qian Zhang, Wei Feng, and Liang Wan. Silhouette-based 6d object pose estimation. In International Conference on Computational Visual Media, pages 157–179. Springer, 2024. 2, 5, 6
2024
-
[11]
On the shape of a set of points in the plane.IEEE Trans- actions on information theory, 29(4):551–559, 1983
Herbert Edelsbrunner, David Kirkpatrick, and Raimund Sei- del. On the shape of a set of points in the plane.IEEE Trans- actions on information theory, 29(4):551–559, 1983. 2, 3
1983
-
[12]
3d model of a dragon released during eurographics 2007, 2007
Ji ˇrí Filip, Radek Holub, Vlastimil Havran, Jaroslav Kˇrivánek, and Daniel Sýkora. 3d model of a dragon released during eurographics 2007, 2007. URLwww.dcgi.fel. cvut.cz/eg07/index.php?page=dragon. 4
2007
-
[13]
Vincent Gaudillière, Gilles Simon, and Marie-Odile Berger. Perspective-1-ellipsoid: Formulation, analysis and solutions of the camera pose estimation problem from one ellipse- ellipsoid correspondence.International Journal of Computer Vision, 131(9):2446–2470, 2023. 2, 8
2023
-
[14]
Courier Corporation, 2006
Robert Gilmore.Lie groups, Lie algebras, and some of their applications. Courier Corporation, 2006. 6
2006
-
[15]
Relative pose from cylinder silhouettes
Anna Gummeson and Magnus Oskarsson. Relative pose from cylinder silhouettes. InProceedings of the Asian Con- ference on Computer Vision, pages 2545–2561, 2024. 2
2024
-
[16]
Pose initialization of uncooperative spacecraft by template match- ing with sparse point cloud.Journal of Guidance, Control, and Dynamics, 44(9):1707–1720, 2021
Wulong Guo, Weiduo Hu, Chang Liu, and Tingting Lu. Pose initialization of uncooperative spacecraft by template match- ing with sparse point cloud.Journal of Guidance, Control, and Dynamics, 44(9):1707–1720, 2021. 1
2021
-
[17]
Global optimization through rotation space search.International Journal of Com- puter Vision, 82(1):64–79, 2009
Richard I Hartley and Fredrik Kahl. Global optimization through rotation space search.International Journal of Com- puter Vision, 82(1):64–79, 2009. 1, 3
2009
-
[18]
Com- bined shape, appearance and silhouette for simultaneous ma- nipulator and object tracking
Paul Hebert, Nicolas Hudson, Jeremy Ma, Thomas Howard, Thomas Fuchs, Max Bajracharya, and Joel Burdick. Com- bined shape, appearance and silhouette for simultaneous ma- nipulator and object tracking. In2012 IEEE International Conference on Robotics and Automation, pages 2405–2412. IEEE, 2012. 1
2012
-
[19]
Closed-form solution of absolute orientation us- ing orthonormal matrices.Journal of the Optical Society of America A, 5(7):1127–1135, 1988
Berthold KP Horn, Hugh M Hilden, and Shahriar Negah- daripour. Closed-form solution of absolute orientation us- ing orthonormal matrices.Journal of the Optical Society of America A, 5(7):1127–1135, 1988. 6
1988
-
[20]
Silhouette lookup for automatic pose tracking
Nicholas R Howe. Silhouette lookup for automatic pose tracking. In2004 Conference on Computer Vision and Pat- tern Recognition Workshop, pages 15–22. IEEE, 2004. 2
2004
-
[21]
Silhouette lookup for monocular 3d pose tracking.Image and Vision Computing, 25(3):331–341,
Nicholas R Howe. Silhouette lookup for monocular 3d pose tracking.Image and Vision Computing, 25(3):331–341,
-
[22]
Using lo- cally corresponding cad models for dense 3d reconstructions from a single image
Chen Kong, Chen-Hsuan Lin, and Simon Lucey. Using lo- cally corresponding cad models for dense 3d reconstructions from a single image. InProceedings of the IEEE conference on computer vision and pattern recognition, pages 4857– 4865, 2017. 2
2017
-
[23]
On pencils of tangent planes and the recognition of smooth 3d shapes from silhouettes
Svetlana Lazebnik, Amit Sethi, Cordelia Schmid, David Kriegman, Jean Ponce, and Martial Hebert. On pencils of tangent planes and the recognition of smooth 3d shapes from silhouettes. InEuropean Conference on Computer Vision, pages 651–665. Springer, 2002. 2
2002
-
[24]
Bcot: A markerless high-precision 3d object tracking benchmark
Jiachen Li, Bin Wang, Shiqiang Zhu, Xin Cao, Fan Zhong, Wenxuan Chen, Te Li, Jason Gu, and Xueying Qin. Bcot: A markerless high-precision 3d object tracking benchmark. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 6697–6706, 2022. 6
2022
-
[25]
Model-based shape from silhouette: A solution involving a small number of views
JF Menudet, JM Becker, T Fournel, and C Mennessier. Model-based shape from silhouette: A solution involving a small number of views. InProceedings of the Second Inter- national Conference on Computer Vision Theory and Appli- cations, pages 379–386, 2007. 2 9
2007
-
[26]
The levenberg-marquardt algorithm: imple- mentation and theory
Jorge J Moré. The levenberg-marquardt algorithm: imple- mentation and theory. InNumerical analysis: proceedings of the biennial Conference held at Dundee, June 28–July 1, 1977, pages 105–116. Springer, 2006. 6
1977
-
[27]
Optimal coherent point selection for 3d quality inspection from silhouette-based reconstructions.Mathematics, 11(21):4419, 2023
Javier Pérez Soler, Jose-Luis Guardiola, Alberto Perez Jimenez, Pau Garrigues Carbó, Nicolás García Sastre, and Juan-Carlos Perez-Cortes. Optimal coherent point selection for 3d quality inspection from silhouette-based reconstructions.Mathematics, 11(21):4419, 2023. 1
2023
-
[28]
Fast and controllable 3d modelling from silhouettes
Mukta Prasad, Andrew W Fitzgibbon, and Andrew Zisser- man. Fast and controllable 3d modelling from silhouettes. In Eurographics (Short Presentations), pages 9–12, 2005. 2
2005
-
[29]
Convex solutions to sft and nrsfm under algebraic deformation models.IEEE Transactions on Pattern Analysis and Machine Intelligence,
Agniva Sengupta and Adrien Bartoli. Convex solutions to sft and nrsfm under algebraic deformation models.IEEE Transactions on Pattern Analysis and Machine Intelligence,
-
[30]
Shape-from-template with generalised camera.Image and Vision Computing, page 105579, 2025
Agniva Sengupta and Stefan Zachow. Shape-from-template with generalised camera.Image and Vision Computing, page 105579, 2025. 1, 2
2025
-
[31]
The Mathworks.MATLAB Function Reference
Inc. The Mathworks.MATLAB Function Reference. The Mathworks, Inc., 2024. 4
2024
-
[32]
Silhouette-based variational methods for single view reconstruction
Eno Töppe, Martin R Oswald, Daniel Cremers, and Carsten Rother. Silhouette-based variational methods for single view reconstruction. InVideo Processing and Computa- tional Video: International Seminar, Dagstuhl Castle, Ger- many, October 10-15, 2010. Revised Papers, pages 104–123. Springer, 2011. 2
2010
-
[33]
Scatter search and local nlp solvers: A multistart framework for global optimization.IN- FORMS Journal on computing, 19(3):328–340, 2007
Zsolt Ugray, Leon Lasdon, John Plummer, Fred Glover, James Kelly, and Rafael Martí. Scatter search and local nlp solvers: A multistart framework for global optimization.IN- FORMS Journal on computing, 19(3):328–340, 2007. 6
2007
-
[34]
Invariant- based recognition of complex curved 3d objects from image contours.Computer Vision and Image Understanding, 72(3): 287–303, 1998
B Vijayakumar, David Kriegman, and Jean Ponce. Invariant- based recognition of complex curved 3d objects from image contours.Computer Vision and Image Understanding, 72(3): 287–303, 1998. 2
1998
-
[35]
Deep active contours for real-time 6-dof object tracking
Long Wang, Shen Yan, Jianan Zhen, Yu Liu, Maojun Zhang, Guofeng Zhang, and Xiaowei Zhou. Deep active contours for real-time 6-dof object tracking. InProceedings of the IEEE/CVF International Conference on Computer Vision, pages 14034–14044, 2023. 2, 8
2023
-
[36]
Directshape: Direct photometric alignment of shape pri- ors for visual vehicle pose and shape estimation
Rui Wang, Nan Yang, Joerg Stueckler, and Daniel Cremers. Directshape: Direct photometric alignment of shape pri- ors for visual vehicle pose and shape estimation. In2020 IEEE International Conference on Robotics and Automation (ICRA), pages 11067–11073. IEEE, 2020. 1
2020
-
[37]
Azimuthal equidistant projection, Dec
Wikipedia. Azimuthal equidistant projection, Dec
-
[38]
[Online; accessed 10-April-2026]
URLhttps://en.wikipedia.org/wiki/ Azimuthal_equidistant_projection. [Online; accessed 10-April-2026]. 3
2026
-
[39]
Spherical harmonics.http : / / en
Wikipedia. Spherical harmonics.http : / / en . wikipedia . org / w / index . php ? title = Spherical % 20harmonics & oldid = 1321561306,
-
[40]
[Online; accessed 13-November-2025]. 7
2025
-
[41]
Using silhou- ette for pose estimation of object with surface of revolution
Ming Zhang, Yinqiang Zheng, and Yuncai Liu. Using silhou- ette for pose estimation of object with surface of revolution. In2009 16th IEEE International Conference on Image Pro- cessing (ICIP), pages 333–336. IEEE, 2009. 2
2009
-
[42]
Mc-lrf based pose measurement system for shipborne aircraft automatic landing.Chinese Journal of Aeronautics, 36(8):298–312, 2023
Zhuo Zhang, W ANG Qiufu, BI Daoming, SUN Xiaoliang, and YU Qifeng. Mc-lrf based pose measurement system for shipborne aircraft automatic landing.Chinese Journal of Aeronautics, 36(8):298–312, 2023. 1 10
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.