Recognition: unknown
A Coordinate-Invariant Local Representation of Motion and Force Trajectories for Identification and Generalization Across Coordinate Systems
Pith reviewed 2026-05-10 15:39 UTC · model grok-4.3
The pith
The Dual-Upper-Triangular Invariant Representation converts rigid-body and force trajectories into a form that stays consistent across any coordinate system while reducing singularity problems.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Transforming a trajectory into the Dual-Upper-Triangular Invariant Representation (DUTIR) produces a coordinate-invariant encoding that is more robust to singularities than earlier representations, together with a stable computational procedure for obtaining the encoding from measured data; the construction is formulated abstractly enough that it applies without change to both rigid-body motion trajectories and interaction-force trajectories.
What carries the argument
The Dual-Upper-Triangular Invariant Representation (DUTIR), which encodes local motion or force data through a pair of upper-triangular structures whose invariants eliminate dependence on the external coordinate frame while controlling the locations of singularities.
If this is right
- Trajectory identification, segmentation, and prediction become possible without retraining or recalibrating when the coordinate frame changes.
- A single model can be trained on rigid-body position data and applied directly to interaction-force data, or vice versa.
- Generalization across subjects, robots, or environments improves because the representation discards frame-specific information while keeping task-relevant dynamics.
- The supplied algorithm allows direct computation of the invariant form from standard sensor streams without intermediate conversion steps.
Where Pith is reading between the lines
- Learned controllers or predictors built in DUTIR space could be transferred to new hardware by simply re-expressing the new sensor data in the same invariant coordinates, without explicit coordinate calibration.
- The representation might support fusion of data from multiple independent measurement systems that each use their own reference frames.
- Because the method is local, it could be applied incrementally to streaming data for real-time tasks such as online motion classification.
Load-bearing premise
The transformation from raw sensor readings to DUTIR remains stable, introduces no new singularities, tolerates typical measurement noise, and retains every piece of information required for downstream identification or generalization tasks.
What would settle it
The same physical trajectory, recorded once in each of two different coordinate frames and then converted to DUTIR, yields representations that differ by more than sensor noise or that produce inconsistent segmentation or recognition results when fed to an otherwise identical classifier.
Figures



read the original abstract
Identifying the trajectories of rigid bodies and of interaction forces is essential for a wide range of tasks in robotics, biomechanics, and related domains. These tasks include trajectory segmentation, recognition, and prediction. For these tasks, a key challenge lies in achieving consistent results when the trajectory is expressed in different coordinate systems. A way to address this challenge is to utilize trajectory models that can generalize across coordinate systems. The focus of this paper is on such trajectory models obtained by transforming the trajectory into a coordinate-invariant representation. However, coordinate-invariant representations often suffer from sensitivity to measurement noise and the manifestation of singularities in the representation, where the representation is not uniquely defined. This paper aims to address this limitation by introducing the novel Dual-Upper-Triangular Invariant Representation (DUTIR), with improved robustness to singularities, along with its computational algorithm. The proposed representation is formulated at a level of abstraction that makes it applicable to both rigid-body trajectories and interaction-force trajectories, hence making it a versatile tool for robotics, biomechanics, and related domains.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces the Dual-Upper-Triangular Invariant Representation (DUTIR) as a coordinate-invariant local representation for rigid-body motion trajectories in SE(3) and interaction wrench trajectories. It derives an explicit mapping and computational algorithm from coordinate-transformation principles, claiming reduced sensitivity to singularities relative to prior invariants while preserving information needed for trajectory identification, segmentation, recognition, and generalization across coordinate systems.
Significance. If the internal consistency and reduced singularity set hold under real sensor noise, DUTIR would offer a unified, reusable representation for both kinematic and dynamic trajectories, supporting generalization without explicit frame transformations. The explicit algorithm and algebraic identities constitute a reproducible contribution that could streamline tasks in robotics and biomechanics.
minor comments (3)
- [§3.2] §3.2, Algorithm 1: the extraction procedure for the dual-upper-triangular factors should include a brief complexity analysis or operation count to clarify real-time feasibility on embedded hardware.
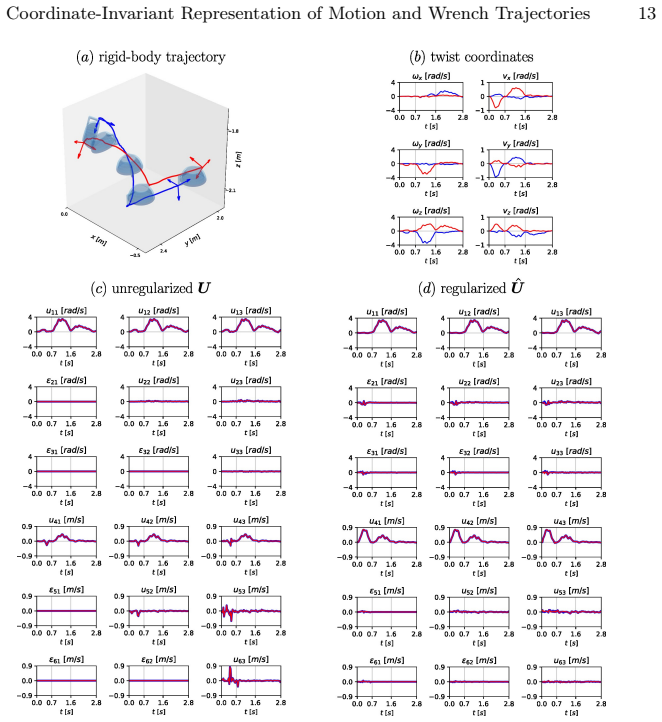
- [Figure 2] Figure 2 and §4.1: the caption and surrounding text should explicitly label which singularities from prior representations (e.g., division by zero when angular velocity aligns with translation) are eliminated by the DUTIR construction.
- [§5] §5: the generalization experiments would benefit from an additional baseline that applies a learned coordinate transformation rather than relying solely on invariant representations, to isolate the contribution of DUTIR.
Simulated Author's Rebuttal
We thank the referee for the positive review and recommendation of minor revision. The summary correctly identifies the core contribution of DUTIR as a coordinate-invariant representation for both motion and wrench trajectories with an explicit algorithm and reduced singularity sensitivity.
Circularity Check
No significant circularity; derivation is algebraically self-contained
full rationale
The paper constructs the Dual-Upper-Triangular Invariant Representation (DUTIR) directly from coordinate-transformation identities on SE(3) and wrench trajectories, supplying explicit mappings, extraction procedures, and an algorithm that reduce the singularity set by algebraic design rather than by fitting or external uniqueness theorems. No load-bearing step equates a claimed prediction to its own inputs, renames a prior result, or relies on self-citation chains; the invariance property and applicability to both motion and force trajectories follow from the stated transformation rules without circular reduction.
Axiom & Free-Parameter Ledger
invented entities (1)
-
Dual-Upper-Triangular Invariant Representation (DUTIR)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
https://doi.org/10.1371/journal.pone.0275218
Ancillao, A., Vochten, M., Verduyn, A., De Schutter, J., Aertbeliën, E.: An optimal method for calculating an average screw axis for a joint, with improved sensitivity tonoiseandprovidingananalysisofthedispersionoftheinstantaneousaxes.PLOS ONE17(10), e0275218 (2022). https://doi.org/10.1371/journal.pone.0275218
-
[2]
Bulletin des Sciences Mathématiques, Férussac14, 321–326 (1830)
Chasles, M.: Note sur les propriétés génerales du système de deux corps semblables entr’euxetplacésd’unemanièrequelconquedansl’espace;etsurledéplacementfini ou infiniment petit d’un corps solide libre. Bulletin des Sciences Mathématiques, Férussac14, 321–326 (1830)
-
[3]
In: Proceedings of The 33rd International Conference on Machine Learning
Cohen, T., Welling, M.: Group equivariant convolutional networks. In: Proceedings of The 33rd International Conference on Machine Learning. vol. 48, pp. 2990–2999. PMLR, New York, New York, USA (20–22 Jun 2016), https://proceedings.mlr. press/v48/cohenc16.html
2016
-
[4]
De Schutter, J.: Invariant description of rigid body motion trajectories. ASME Journal of Mechanisms and Robotics2(1) (2010). https://doi.org/10.1115/1. 4000524
work page doi:10.1115/1 2010
-
[5]
2012 IEEE International Conference on Systems, Man, and Cybernetics (SMC) pp
Delabie, T., Cigdem, O., Matthysen, R., De Laet, T., De Schutter, J.: Invariant representations to reduce the variability in recognition of rigid body motion tra- jectories. 2012 IEEE International Conference on Systems, Man, and Cybernetics (SMC) pp. 1658–1663 (2012). https://doi.org/10.1109/ICSMC.2012.6377975
-
[6]
The Johns Hopkins University Press, Baltimore, MD (2013)
Golub, G.H., Van Loan, C.F.: Matrix computations. The Johns Hopkins University Press, Baltimore, MD (2013)
2013
-
[7]
IEEE Transactions on Cybernetics48(5), 1513–1525 (2018)
Guo, Y., Li, Y., Shao, Z.: Rrv: A spatiotemporal descriptor for rigid body motion recognition. IEEE Transactions on Cybernetics48(5), 1513–1525 (2018). https: //doi.org/10.1109/TCYB.2017.2705227
-
[8]
IEEE Transactions on Neural Networks and Learning Systems 23(3), 412–424 (2012)
Iosifidis,A.,Tefas,A.,Pitas,I.:View-invariantactionrecognitionbasedonartificial neural networks. IEEE Transactions on Neural Networks and Learning Systems 23(3), 412–424 (2012). https://doi.org/10.1109/TNNLS.2011.2181865
-
[9]
Autonomous Robots42, 1–21 (2018)
Lee, D., Soloperto, R., Saveriano, M.: Bidirectional invariant representation of rigid body motions and its application to gesture recognition and reproduction. Autonomous Robots42, 1–21 (2018). https://doi.org/10.1007/s10514-017-9645-x
-
[10]
Cambridge University Press, Cam- bridge (2017)
Lynch, K.M., Park, F.C.: Modern robotics. Cambridge University Press, Cam- bridge (2017)
2017
-
[11]
CRC Press, Inc., Boca Raton, FL, USA, 1st edn
Murray, R.M., Sastry, S.S., Zexiang, L.: A Mathematical Introduction to Robotic Manipulation. CRC Press, Inc., Boca Raton, FL, USA, 1st edn. (1994)
1994
-
[12]
Journal de l’Ecole Polytechnique6(13), 182–205 (1806)
Poinsot, L.: Sur la composition des moments et la composition des aires. Journal de l’Ecole Polytechnique6(13), 182–205 (1806)
-
[13]
IEEE Access10, 82923– 82943 (2022)
Pöppelbaum, J., Schwung, A.: Predicting rigid body dynamics using dual quater- nion recurrent neural networks with quaternion attention. IEEE Access10, 82923– 82943 (2022). https://doi.org/10.1109/ACCESS.2022.3196340
-
[14]
Journal of Mechanical Design127(2), 227–231 (2005)
Roth, B.: Finding geometric invariants from time-based invariants for spherical and spatial motions. Journal of Mechanical Design127(2), 227–231 (2005). https: //doi.org/10.1115/1.1828462
-
[15]
Psychometrika31(1), 1–10 (1966)
Schönemann, P.H.: A generalized solution of the orthogonal procrustes problem. Psychometrika31(1), 1–10 (1966)
1966
-
[16]
Verduyn, A., Aertbeliën, E., Maes, G., Schutter, J.D., Vochten, M.: Bilts: A bi- invariant similarity measure for robust object trajectory recognition under refer- ence frame variations (2025), https://arxiv.org/abs/2405.04392 18 A. Verduyn et al
-
[17]
Verduyn, A., Bruyninckx, H., Vochten, M., De Schutter, J.: Invariant Motion Tra- jectory Similarity Measurement: Resolving Singularity Issues for Robust Invariant Rigid-Body Motion Recognition. Doctoral dissertation, Arenberg Doctoral School, KU Leuven, Leuven, Belgium (2025), https://lirias.kuleuven.be/4238129?&lang= en
-
[18]
Verduyn, A., Vochten, M., De Schutter, J.: Enhancing motion trajectory segmen- tation of rigid bodies using a novel screw-based trajectory-shape representation. 2024 IEEE International Conference on Robotics and Automation (ICRA) pp. 7179–7185 (2024). https://doi.org/10.1109/ICRA57147.2024.10610030
-
[19]
2025 IEEE 21st International Conference on Automation Science and En- gineering (CASE) pp
Verduyn, A., Vochten, M., Schutter, J.D.: Enhancing hand palm motion gesture recognition by eliminating reference frame bias via frame-invariant similarity mea- sures. 2025 IEEE 21st International Conference on Automation Science and En- gineering (CASE) pp. 866–873 (2025). https://doi.org/10.1109/CASE58245.2025. 11163910
-
[20]
2015 IEEE Inter- national Conference on Robotics and Automation (ICRA) pp
Vochten, M., De Laet, T., De Schutter, J.: Comparison of rigid body motion tra- jectory descriptors for motion representation and recognition. 2015 IEEE Inter- national Conference on Robotics and Automation (ICRA) pp. 3010–3017 (2015). https://doi.org/10.1109/ICRA.2015.7139612
-
[21]
Robotics and Autonomous Sys- tems122, 103291 (2019)
Vochten, M., De Laet, T., De Schutter, J.: Generalizing demonstrated motion tra- jectories using coordinate-free shape descriptors. Robotics and Autonomous Sys- tems122, 103291 (2019). https://doi.org/10.1016/j.robot.2019.103291
-
[22]
IEEE Transactions on Robotics39(6), 4892–4912 (2023)
Vochten, M., Mohammadi, A.M., Verduyn, A., De Laet, T., Aertbeliën, E., De Schutter, J.: Invariant descriptors of motion and force trajectories for interpret- ing object manipulation tasks in contact. IEEE Transactions on Robotics39(6), 4892–4912 (2023). https://doi.org/10.1109/tro.2023.3309230
-
[23]
IEEE Transactions on Human-Machine Systems46(4), 498–509 (2016)
Wang, P., Li, W., Gao, Z., Zhang, J., Tang, C., Ogunbona, P.O.: Action recognition from depth maps using deep convolutional neural networks. IEEE Transactions on Human-Machine Systems46(4), 498–509 (2016). https://doi.org/10.1109/THMS. 2015.2504550
-
[24]
The International Journal of Robotics Research27(8), 895–917 (2008)
Wu, S., Li, Y.: On signature invariants for effective motion trajectory recognition. The International Journal of Robotics Research27(8), 895–917 (2008). https:// doi.org/10.1177/0278364908091678
-
[25]
Pattern Recognition76, 137–148 (2018)
Yao, G., Youfu, L., Zhanpeng, S.: Dsrf: A flexible trajectory descriptor for ar- ticulated human action recognition. Pattern Recognition76, 137–148 (2018). https://doi.org/https://doi.org/10.1016/j.patcog.2017.10.034
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.