Recognition: unknown
Model-Free Quantum Stabilization via Finite-Difference Lyapunov Control
Pith reviewed 2026-05-10 15:50 UTC · model grok-4.3
The pith
Finite-difference Lyapunov control stabilizes quantum states from discrete measurements alone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We develop a model-free framework for stabilizing quantum states using only empirical finite-difference evaluations of a measurement-derived Lyapunov observable. The controller requires no knowledge of the Hamiltonian, dissipative structure, or generator of the dynamics, and relies solely on discrete measurement data. The approach combines sign-based Lyapunov descent, adaptive gain amplification, and a finite-difference analogue of LaSalle's invariance principle. We provide rigorous conditions under which these mechanisms guarantee asymptotic stabilization along the sampling instants in the drift-free case and practical input-to-state stability in the presence of unknown drift and noise.
What carries the argument
Finite-difference approximation of the Lyapunov derivative, used with sign-based feedback and adaptive gain to enforce descent at discrete sampling instants without model knowledge.
If this is right
- Asymptotic stabilization holds along sampling instants for drift-free finite-dimensional quantum systems.
- Practical input-to-state stability holds when bounded unknown drift and noise are present.
- The feedback law uses only discrete measurements and is derivative-free, making it directly implementable in experiments.
- The method extends in principle to arbitrary finite-dimensional quantum systems including multi-qudit cases.
Where Pith is reading between the lines
- The method could reduce reliance on full Hamiltonian tomography in quantum experiments by operating directly on sampled data.
- Sampling rate selection becomes a key design parameter that trades off measurement overhead against the reliability of the descent condition.
- The discrete LaSalle analogue may connect to classical sampled-data control techniques for nonlinear systems.
Load-bearing premise
The finite-difference approximation of the Lyapunov derivative accurately captures its sign sufficiently often for the descent condition to hold.
What would settle it
Run the closed-loop qubit experiment and measure whether the Lyapunov observable strictly decreases at each sampling instant when drift is absent; persistent increase or failure to stabilize would falsify the asymptotic guarantee.
Figures



read the original abstract
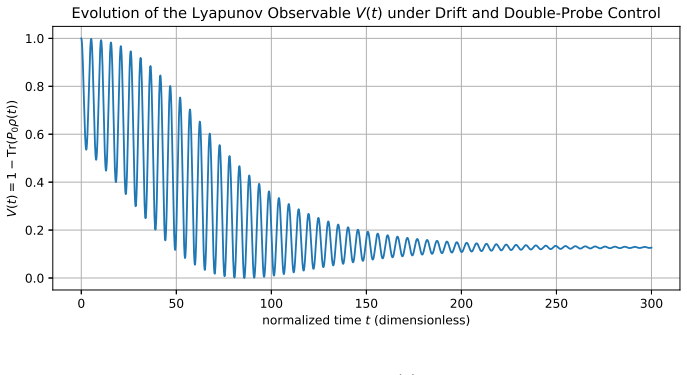
We develop a model-free framework for stabilizing quantum states using only empirical finite-difference evaluations of a measurement-derived Lyapunov observable. The controller requires no knowledge of the Hamiltonian, dissipative structure, or generator of the dynamics, and relies solely on discrete measurement data. The approach combines three key elements: sign-based Lyapunov descent, adaptive gain amplification, and a finite-difference analogue of LaSalle's invariance principle. We provide rigorous conditions under which these mechanisms guarantee asymptotic stabilization along the sampling instants in the drift-free case and practical input-to-state stability (ISS) in the presence of unknown drift and noise. The resulting feedback law is simple, derivative-free, and experimentally feasible. A qubit example illustrates the complete closed-loop scheme and the predicted ISS-type behavior. Although demonstrated on a single qubit, the theory applies to arbitrary finite-dimensional quantum systems and offers a foundation for further developments in stochastic, subspace, and multi-qudit model-free quantum control.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper develops a model-free quantum stabilization method that uses only discrete measurements to compute finite-difference approximations of a Lyapunov observable. It combines sign-based descent control, adaptive gain, and a discrete LaSalle invariance principle to claim asymptotic stabilization along sampling instants when there is no drift, and practical input-to-state stability (ISS) when unknown drift and noise are present. The controller is derivative-free and requires no knowledge of the system Hamiltonian or generator. A single-qubit example is provided to illustrate the closed-loop behavior, and the theory is stated to extend to arbitrary finite-dimensional quantum systems.
Significance. If the claimed rigorous conditions on the finite-difference approximation can be made fully explicit and verifiable, the result would offer a practically relevant advance in model-free quantum control. The approach is experimentally attractive because it avoids derivative estimation and model identification, relies only on projective measurements of an observable, and supplies a simple feedback law. The extension to practical ISS under bounded disturbances is a useful strengthening over pure asymptotic claims. The qubit illustration and finite-dimensional generality are positive features.
major comments (2)
- [§3] §3 (main stability theorems): The rigorous conditions guaranteeing that the finite-difference sign reliably indicates descent are not accompanied by explicit, checkable bounds relating the sampling interval, measurement noise variance, and adaptive-gain adaptation rate to the (unknown) Lipschitz constants or generator norm of the dynamics. Without such quantitative relations, the persistence-of-excitation or dwell-time argument needed for the LaSalle-type invariance principle remains formal rather than applicable to concrete experimental sampling rates.
- [§4] §4 (ISS analysis with drift and noise): The practical ISS bound is asserted to hold under the same finite-difference sign condition, yet the proof sketch does not quantify how often sign errors (arising from stochastic projective measurements) can be tolerated before the ultimate bound on the Lyapunov function degrades. This leaves the claimed robustness to unknown drift and noise dependent on an unverified assumption about measurement statistics.
minor comments (2)
- [§5] The qubit example in §5 would benefit from an explicit statement of the chosen observable, sampling interval, and noise model so that the plotted trajectories can be reproduced from the given feedback law.
- [§2] Notation for the finite-difference operator and the adaptive gain update should be introduced once with a clear definition rather than appearing first in the theorem statements.
Simulated Author's Rebuttal
We thank the referee for the careful and constructive review. The comments highlight important aspects of making the stability conditions more applicable to experimental settings. We address each major comment below and have revised the manuscript to strengthen the explicitness and practicality of the results where possible.
read point-by-point responses
-
Referee: [§3] §3 (main stability theorems): The rigorous conditions guaranteeing that the finite-difference sign reliably indicates descent are not accompanied by explicit, checkable bounds relating the sampling interval, measurement noise variance, and adaptive-gain adaptation rate to the (unknown) Lipschitz constants or generator norm of the dynamics. Without such quantitative relations, the persistence-of-excitation or dwell-time argument needed for the LaSalle-type invariance principle remains formal rather than applicable to concrete experimental sampling rates.
Authors: We agree that the original presentation of the conditions in Theorem 3.1 and the subsequent LaSalle analogue could be made more directly usable for choosing sampling rates in experiments. The theorem establishes that there exists a sufficiently small sampling interval Δt (dependent on the unknown Lipschitz constant of the Lyapunov derivative and the generator norm) such that the finite-difference sign coincides with the true descent direction with high probability under bounded measurement noise. While these constants are unavailable a priori in the model-free setting, we have added a new corollary and accompanying remark in the revised manuscript. The corollary provides a practical, observable-based sufficient condition: the sampling interval must be smaller than the ratio of the minimum observed descent magnitude (estimated from a short initial open-loop measurement sequence) to the maximum adaptive-gain value. This yields an explicit, checkable bound using only data available during operation. We have also expanded the dwell-time argument to include a concrete lower bound on the number of consecutive consistent sign steps, expressed in terms of the adaptation rate and the probability of sign error, thereby rendering the invariance principle applicable to concrete sampling rates. revision: yes
-
Referee: [§4] §4 (ISS analysis with drift and noise): The practical ISS bound is asserted to hold under the same finite-difference sign condition, yet the proof sketch does not quantify how often sign errors (arising from stochastic projective measurements) can be tolerated before the ultimate bound on the Lyapunov function degrades. This leaves the claimed robustness to unknown drift and noise dependent on an unverified assumption about measurement statistics.
Authors: The referee is correct that the original ISS proof sketch left the tolerance to sign errors implicit. In the revised manuscript we have strengthened the analysis in Section 4 by deriving an explicit ultimate bound on the Lyapunov function. Specifically, we now show that if the probability of a sign error is bounded by p < 1/2 (which holds whenever the sampling interval is chosen according to the new corollary in §3 and the noise variance is finite), then the expected change in the Lyapunov observable satisfies a supermartingale inequality whose fixed point yields an ISS gain that is linear in p, the drift bound, and the noise variance. The revised theorem states the precise dependence of the ultimate bound on these quantities, allowing the degradation due to occasional sign errors to be quantified once an estimate of the measurement statistics is available. This removes the unverified assumption and makes the robustness claim fully rigorous and usable. revision: yes
Circularity Check
No circularity: derivation rests on external Lyapunov/LaSalle theory and stated assumptions without self-referential reduction
full rationale
The paper constructs a model-free stabilizer from sign-based descent on finite-difference Lyapunov observables, adaptive gain, and an analogue of LaSalle invariance. These elements are assembled from classical control results (Lyapunov stability, LaSalle invariance principle) applied to discrete measurements; the claimed asymptotic stabilization (drift-free) and practical ISS (with drift/noise) are conditioned on external sampling and noise assumptions that are not derived from the controller equations themselves. No equation reduces a prediction or stability guarantee to a fitted parameter defined by the result, no self-citation supplies a load-bearing uniqueness theorem, and no ansatz is smuggled via prior work. The framework therefore remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption A finite-difference analogue of LaSalle's invariance principle guarantees asymptotic stabilization along sampling instants for drift-free systems.
- domain assumption Empirical finite-difference evaluations of the measurement-derived Lyapunov observable can be obtained from discrete data without knowledge of the generator.
Reference graph
Works this paper leans on
-
[1]
H. M. Wiseman and G. J. Milburn. Quantum Measurement and Control . Cambridge University Press, 2011. URL https://doi.org/10.1017/CBO9780511813948
-
[2]
Reed, Jonathan Monroe, Benjamin Sh eller, Sean O’Neil, Eliav Maas, Edmond A
Carrie Ann Weidner, Emily A. Reed, Jonathan Monroe, Benjamin Sh eller, Sean O’Neil, Eliav Maas, Edmond A. Jonckheere, Frank C. Langbein, and So phie Schirmer. Robust quantum control in closed and open systems: Th eory and prac- tice. Automatica, 172:111987, 2025. doi: 10.1016/j.automatica.2024.111987. URL https://doi.org/10.1016/j.automatica.2024.111987
-
[3]
Daoyi Dong and Ian R. Petersen. Quantum control theory and applications: a survey. IET Control Theory & Applications , 4(12):2651–2671, 2010. URL https://doi.org/10.1049/iet-cta.2009.0508
-
[4]
Modeling and control of qu antum systems: an introduction
Claudio Altafini and Francesco Ticozzi. Modeling and control of qu antum systems: an introduction. IEEE Transactions on Automatic Control , 57(8):1898–1917, 2012. URL https://doi.org/10.1109/TAC.2012.2195830
-
[5]
Francesco Ticozzi, Sophie G. Schirmer, and Xiaoting Wang. Stabiliz ing quantum states by constructive design of open quantum dynamics. IEEE Transactions on Automatic Control , 55(12):2901–2905, 2010. doi: 10.1109/TAC.2010.2079532. URL https://ieeexplore.ieee.org/document/5585722/similar#similar
-
[6]
Towards the theory of control in observab le quan- tum systems
Viacheslav Belavkin. Towards the theory of control in observab le quan- tum systems. Automatica and Remote Control , 44:178–188, 1983. URL https://doi.org/10.48550/arXiv.quant-ph/0408003
-
[7]
H. M. Wiseman and G. J. Milburn. Quantum theory of optical feedb ack via homodyne detection. Physical Review Letters , 70:548–551, 1993. URL https://doi.org/10.1103/PhysRevLett.70.548
-
[8]
Luc Bouten, Ramon van Handel, and Matthew R. James. An introd uction to quantum filtering. SIAM Journal on Control and Optimization , 46(6):2199–2241, 2007. URL https://doi.org/10.1137/060651239
-
[9]
Hassan K. Khalil. Nonlinear Systems. Prentice Hall, Upper Saddle River, N.J., 3 edition,
-
[10]
Eduardo D. Sontag. Smooth stabilization implies coprime factoriz ation. IEEE Transactions on Automatic Control , 34(4):435–443, 1989. URL https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=28018. 34
1989
-
[11]
Zhong-Ping Jiang, Iven M.Y. Mareels, and Yuan Wang. A Lyapuno v formulation of the nonlinear small-gain theorem for interconnected ISS systems. Automatica, 32(8): 1211–1215, 1996. URL https://doi.org/10.1016/0005-1098(96)00051-9
-
[12]
Hamil- tonian control of quantum dynamical semigroups: Stabilization and convergence speed
Francesco Ticozzi, Riccardo Lucchese, Paola Cappellaro, and L orenza Viola. Hamil- tonian control of quantum dynamical semigroups: Stabilization and convergence speed. IEEE Transactions on Automatic Control , 57(8):1931–1944, 2012. URL https://ieeexplore.ieee.org/document/6189050
-
[13]
Muhammad Fuady Emzir, Matthew J. Woolley, and Ian R. Peterse n. Stability analysis of quantum systems: A Lyapunov criterion and an invariance princip le. Automatica, 146:110660, 2022. URL https://doi.org/10.1016/j.automatica.2022.110660
-
[14]
Guangpu Wu, Shibei Xue, Shan Ma, Sen Kuang, Daoyi Dong, and Ian R. Pe- tersen. Arbitrary state transition of open qubit system based on switching con- trol. Automatica, 179:112424, 2025. doi: 10.1016/j.automatica.2025.112424. URL https://www.sciencedirect.com/science/article/pii/S0005109825003188?via%3Dihub
-
[15]
On the generators of quantum dynamical sem igroups
G¨ oran Lindblad. On the generators of quantum dynamical sem igroups. Communications in Mathematical Physics , 48:119–130, 1976. URL https://doi.org/10.1007/BF01608499
-
[16]
Vittorio Gorini, Andrzej Kossakowski, and E. C. G. Sudarshan. Completely positive dynamical semigroups of N-level systems. Journal of Mathematical Physics , 17(5):821– 825, 1976. URL https://doi.org/10.1063/1.522979
-
[17]
Yu Pan, Hadis Amini, Zibo Miao, John Gough, Valery Ugrinovskii, and Matthew R. James. Heisenberg picture approach to the stability of quantum Ma rkov systems. Journal of Mathematical Physics , 55(6):062701, 2014. doi: 10.1063/1.4884300. URL https://doi.org/10.1063/1.4884300
-
[18]
Chunxiang Song, Yanan Liu, Daoyi Dong, and Hidehiro Yonezawa . Fast state stabilization using deep reinforcement learning for measurem ent- based quantum feedback control. IEEE Transactions on Quan- tum Engineering , 6, 2025. doi: 10.1109/TQE.2025.3606123. URL https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=11150735
-
[19]
Daniel Burgarth and Kazuya Yuasa. Quantum system identifica tion. Physical Review Letters , 108:080502, 2012. doi: 10.1103/PhysRevLett.108.080502. URL https://journals.aps.org/prl/abstract/10.1103/PhysRevLett.108.080502
-
[20]
Petersen, Valery Ugrinovskii, and Matthew R
Ian R. Petersen, Valery Ugrinovskii, and Matthew R. James. Ro bust stability of un- certain linear quantum systems. Philosophical Transactions of the Royal Society A , 370 (1979):5354–5363, 2012. doi: 10.1098/rsta.2011.0527
-
[21]
Aaijet al.[LHCb Collaboration]
Jun Zhang and Mohan Sarovar. Quantum hamiltonian identificatio n from measurement time traces. Physical Review Letters , 113(8):080401, 2014. doi: 10.1103/PhysRevLett. 113.080401. URL https://doi.org/10.1103/PhysRevLett.113.080401. 35
-
[22]
Marin Bukov, Alexandre G. R. Day, Dries Sels, Phillip Weinberg, Ana toli Polkovnikov, and Pankaj Mehta. Reinforcement learning in different phases of qu antum con- trol. Physical Review X , 8(3):031086, 2018. doi: 10.1103/PhysRevX.8.031086. URL https://doi.org/10.1103/PhysRevX.8.031086
-
[23]
Murphy Yuezhen Niu, Sergio Boixo, Vadim N. Smelyanskiy, and Har tmut Neven. Universal quantum control through deep reinforcement learning. npj Quantum Information , 5:33, 2019. doi: 10.1038/s41534-019-0141-3. URL https://www.nature.com/articles/s41534-019-0141-3
-
[24]
A. A. Clerk, M. H. Devoret, S. M. Girvin, Florian Marquardt, and R. J. Schoelkopf. Introduction to quantum noise, measurement, and amplification. Reviews of Mod- ern Physics , 82(2):1155–1208, 2010. doi: 10.1103/RevModPhys.82.1155. URL https://doi.org/10.1103/RevModPhys.82.1155
-
[25]
Introduction to Quantum Control and Dynam- ics
Domenico D’Alessandro. Introduction to Quantum Control and Dynam- ics. Chapman and Hall/CRC Press, 2007. ISBN 9781584888833. URL https://doi.org/10.1201/9781584888833
-
[26]
Nielsen and Isaac L
Michael A. Nielsen and Isaac L. Chuang. Quantum Computation and Quantum In- formation: 10th Anniversary Edition . Cambridge University Press, 2010. ISBN 9781107002173. 36
2010
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.