Recognition: unknown
Infernux: A Python-Native Game Engine with JIT-Accelerated Scripting
Pith reviewed 2026-05-10 15:51 UTC · model grok-4.3
The pith
Infernux shows that Python scripting can match native game engine performance using a batch NumPy data bridge and Numba JIT compilation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By pairing a C++17/Vulkan real-time core with a Python layer through pybind11 and using a batch data bridge for NumPy array transfers plus optional Numba JIT for update functions, the throughput gap between Python scripting and native engines is closed for the tested cases.
What carries the argument
The batch data bridge that moves state to NumPy arrays in one crossing together with the Numba JIT path for compiling update functions.
If this is right
- Python becomes viable for performance-sensitive game scripting tasks.
- Game logic can use Python data structures and libraries without repeated crossing overhead.
- Update functions gain automatic loop parallelization through Numba.
- The engine supports real-time performance comparable to established tools like Unity on similar workloads.
Where Pith is reading between the lines
- This approach could simplify the use of Python's scientific computing stack for in-game simulations and AI.
- Further optimizations might involve extending the batch bridge to handle more types of game data.
- Developers could experiment with mixing scripted and compiled components for different game systems.
Load-bearing premise
Batch data transfer combined with Numba JIT compilation will deliver real-time performance for standard game scripting without adjustments to graphics rendering complexity or draw call management.
What would settle it
A direct measurement on the three workloads showing Infernux frame rates significantly below Unity 6 or below interactive real-time thresholds would falsify the claim that the gap is closed.
Figures



read the original abstract
This report describes Infernux, an open-source game engine that pairs a C++17/Vulkan real-time core with a Python production layer connected through a single pybind11 boundary. To close the throughput gap between Python scripting and native-code engines, Infernux combines two established techniques - batch-oriented data transfer and JIT compilation - into a cohesive engine-level integration: (i) a batch data bridge that transfers per-frame state into contiguous NumPy arrays in one boundary crossing, and (ii) an optional JIT path via Numba that compiles annotated update functions to LLVM machine code with automatic loop parallelization. We compare against Unity 6 as a reference on three workloads; readers should note differences in shading complexity, draw-call batching, and editor tooling maturity between the two engines. Infernux is MIT-licensed and available at https://chenlizheme.github.io/Infernux/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents Infernux, an open-source game engine that pairs a C++17/Vulkan real-time core with a Python production layer via a single pybind11 boundary. To address the throughput gap between Python scripting and native engines, it combines a batch data bridge that transfers per-frame state into contiguous NumPy arrays and an optional Numba JIT path that compiles annotated update functions to LLVM code with loop parallelization. The system is evaluated against Unity 6 on three workloads, with the authors noting differences in shading complexity, draw-call batching, and editor tooling maturity.
Significance. If the performance claims can be substantiated through controlled quantitative benchmarks that isolate the contributions of the batch bridge and JIT mechanisms, Infernux would offer a practical, Python-native approach to real-time graphics that leverages the existing NumPy/Numba ecosystem. The MIT license and public repository availability are clear strengths for reproducibility and community adoption.
major comments (2)
- [Abstract] Abstract: The abstract states that comparisons were performed on three workloads but supplies no quantitative results, error bars, workload definitions, or performance metrics, leaving the central claim that the batch data bridge plus Numba JIT closes the Python-to-native throughput gap unsupported by visible evidence.
- [Evaluation section] Evaluation section: Although the abstract explicitly flags differences in shading complexity and draw-call batching between Infernux and Unity, the workloads are not described as having been normalized for rendering cost. Without such controls, frame-time advantages cannot be cleanly attributed to the single-boundary NumPy transfer or the optional JIT path rather than to reduced GPU/CPU rendering load.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on the abstract and evaluation. We address each major point below, indicating where revisions will be made to improve clarity and support for the performance claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: The abstract states that comparisons were performed on three workloads but supplies no quantitative results, error bars, workload definitions, or performance metrics, leaving the central claim that the batch data bridge plus Numba JIT closes the Python-to-native throughput gap unsupported by visible evidence.
Authors: We agree that the abstract would be strengthened by including summary quantitative results. In the revised manuscript we will add concise performance metrics (average frame times across the three workloads) and brief workload definitions to the abstract. Full error bars, statistical details, and complete workload specifications will continue to appear in the Evaluation section, but the abstract will now provide visible support for the central throughput claim. revision: yes
-
Referee: [Evaluation section] Evaluation section: Although the abstract explicitly flags differences in shading complexity and draw-call batching between Infernux and Unity, the workloads are not described as having been normalized for rendering cost. Without such controls, frame-time advantages cannot be cleanly attributed to the single-boundary NumPy transfer or the optional JIT path rather than to reduced GPU/CPU rendering load.
Authors: We acknowledge that the workloads were not normalized for rendering cost, as the comparison is between two engines with fundamentally different rendering pipelines. The manuscript already notes differences in shading complexity and draw-call batching. To improve attribution, we will expand the Evaluation section with more detailed workload descriptions (including approximate draw-call counts and shading characteristics) and add explicit discussion of how performance differences relate to the batch bridge and JIT mechanisms versus rendering load. We will also note the inherent limitations in direct cross-engine comparability. revision: partial
Circularity Check
No significant circularity; paper reports an implemented system without derivations or predictions.
full rationale
The manuscript describes Infernux as a concrete C++17/Vulkan engine with a single pybind11 boundary to Python, batch NumPy state transfer, and optional Numba JIT compilation. It presents design decisions, implementation details, and benchmark comparisons to Unity while explicitly noting differences in shading and draw-call batching. No equations, first-principles derivations, fitted parameters renamed as predictions, or load-bearing self-citations appear. The central claim (throughput improvement via the described integration) is supported by the reported implementation and measurements rather than by construction from its own inputs, rendering the work self-contained as an engineering report.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Vulkan can serve as a real-time graphics API for a game engine core
- domain assumption pybind11 provides a usable single-boundary interface between C++ and Python
Reference graph
Works this paper leans on
-
[1]
MuJoCo: A physics engine for model-based control,
E. Todorov, T. Erez, and Y . Tassa, “MuJoCo: A physics engine for model-based control,” inIEEE/RSJ International Conference on Intelli- gent Robots and Systems (IROS), 2012, pp. 5026–5033
2012
-
[2]
Isaac Gym: High performance GPU-based physics simulation for robot learning,
V . Makoviychuk, L. Wawrzyniak, Y . Guo, M. Lu, K. Storey, M. Macklin, D. Hoeller, S. Ruber, A. Allshire, A. Handa, and G. State, “Isaac Gym: High performance GPU-based physics simulation for robot learning,” in Advances in Neural Information Processing Systems (NeurIPS) Datasets and Benchmarks Track, 2021
2021
-
[3]
Unity: A general platform for intelligent agents
A. Juliani, V .-P. Berges, E. Teng, A. Cohen, J. Harper, C. Elion, C. Goy, Y . Gao, H. Henry, M. Mattar, and D. Lange, “Unity: A general platform for intelligent agents,” inarXiv preprint arXiv:1809.02627, 2018
-
[4]
PyTorch: An imperative style, high- performance deep learning library,
A. Paszke, S. Gross, F. Massa, A. Lerer, J. Bradbury, G. Chanan, T. Killeen, Z. Lin, N. Gimelshein, L. Antiga, A. Desmaison, A. K ¨opf, E. Yang, Z. DeVito, M. Raison, A. Tejani, S. Chilamkurthy, B. Steiner, L. Fang, J. Bai, and S. Chintala, “PyTorch: An imperative style, high- performance deep learning library,” inAdvances in Neural Information Processing...
2019
-
[5]
Array programming with NumPy,
C. R. Harris, K. J. Millman, S. J. van der Walt, R. Gommers, P. Virtanen, D. Cournapeau, E. Wieser, J. Taylor, S. Berg, N. J. Smith, R. Kern, M. Picus, S. Hoyer, M. H. van Krevelen, M. Brett, A. Haldane, J. F. del R ´ıo, M. Wiebe, P. Peterson, P. G ´erard-Marchant, K. Sheppard, T. Reddy, W. Weckesser, H. Abbasi, C. Gohlke, and T. E. Oliphant, “Array progr...
2020
-
[6]
G. Brockman, V . Cheung, L. Pettersson, J. Schneider, J. Schul- man, J. Tang, and W. Zaremba, “OpenAI Gym,”arXiv preprint arXiv:1606.01540, 2016
work page internal anchor Pith review arXiv 2016
-
[7]
Unity game engine,
Unity Technologies, “Unity game engine,” https://unity.com, 2024, ac- cessed 2026-04-10
2024
-
[8]
Unreal engine 5,
Epic Games, “Unreal engine 5,” https://www.unrealengine.com, 2024, accessed 2026-04-10
2024
-
[9]
Numba: A LLVM-based Python JIT compiler,
S. K. Lam, A. Pitrou, and S. Seibert, “Numba: A LLVM-based Python JIT compiler,” inProceedings of the Second Workshop on the LLVM Compiler Infrastructure in HPC (LLVM ’15). ACM, 2015
2015
-
[10]
Godot engine,
Godot Engine Contributors, “Godot engine,” https://godotengine.org, 2024, accessed 2026-04-10
2024
-
[11]
EmbodiChain: End-to-end GPU-accelerated framework for embodied AI,
DexForce, “EmbodiChain: End-to-end GPU-accelerated framework for embodied AI,” https://github.com/DexForce/EmbodiChain, 2025, v0.1.3. Apache-2.0 license. Accessed 2026-06-01
2025
-
[12]
The evolution of Lua,
R. Ierusalimschy, L. H. de Figueiredo, and W. Celes, “The evolution of Lua,”Proceedings of the Third ACM SIGPLAN Conference on History of Programming Languages (HOPL III), 2007
2007
-
[13]
Godot engine: Design of a free and open- source game engine,
J. Linietsky and A. Manzur, “Godot engine: Design of a free and open- source game engine,” inFree and Open Source Software Developers’ European Meeting (FOSDEM), 2019
2019
-
[14]
pybind11 — seamless operability between C++11 and Python,
W. Jakob, J. Rhinelander, and D. Moldovan, “pybind11 — seamless operability between C++11 and Python,” https://github.com/pybind/ pybind11, 2017, accessed 2026-04-10
2017
-
[15]
Vulkan 1.3 specification,
The Khronos Group, “Vulkan 1.3 specification,” https://registry.khronos. org/vulkan/specs/1.3/html/vkspec.html, Khronos Group, Tech. Rep., 2024, accessed 2026-04-10
2024
-
[16]
Vulkan memory allocator,
AMD GPUOpen, “Vulkan memory allocator,” https://github.com/ GPUOpen-LibrariesAndSDKs/VulkanMemoryAllocator, 2024, accessed 2026-04-10
2024
-
[17]
Framegraph: Extensible rendering architecture in frost- bite,
Y . O’Donnell, “Framegraph: Extensible rendering architecture in frost- bite,” inGame Developers Conference (GDC). Electronic Arts, 2017
2017
-
[18]
Cascaded shadow maps,
W. Engel, “Cascaded shadow maps,” inShaderX5: Advanced Rendering Techniques. Charles River Media, 2006, pp. 197–206
2006
-
[19]
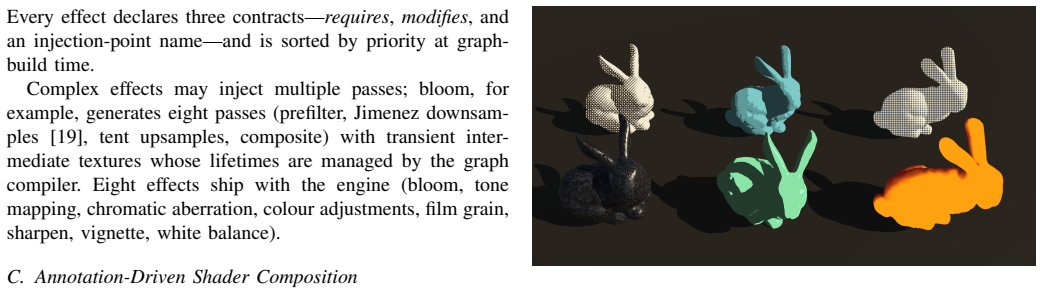
Next generation post processing in call of duty: Advanced warfare,
J. Jimenez, “Next generation post processing in call of duty: Advanced warfare,”ACM SIGGRAPH Courses, 2014
2014
-
[20]
glslang: Khronos reference GLSL/ESSL front end and validator,
The Khronos Group, “glslang: Khronos reference GLSL/ESSL front end and validator,” https://github.com/KhronosGroup/glslang, 2024, accessed 2026-04-10
2024
-
[21]
Jolt physics engine,
J. van den Bergen, “Jolt physics engine,” https://github.com/jrouwe/ JoltPhysics, 2024, accessed 2026-04-10
2024
-
[22]
Nuitka: The Python compiler,
K. Hayen, “Nuitka: The Python compiler,” https://nuitka.net, 2024, accessed 2026-04-10
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.