Recognition: unknown
Roadside LiDAR for Cooperative Safety Auditing at Urban Intersections: Toward Auditable V2X Infrastructure Intelligence
Pith reviewed 2026-05-10 16:34 UTC · model grok-4.3
The pith
Roadside LiDAR with human quality assurance produces reliable near-miss evidence for auditing urban intersection safety.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
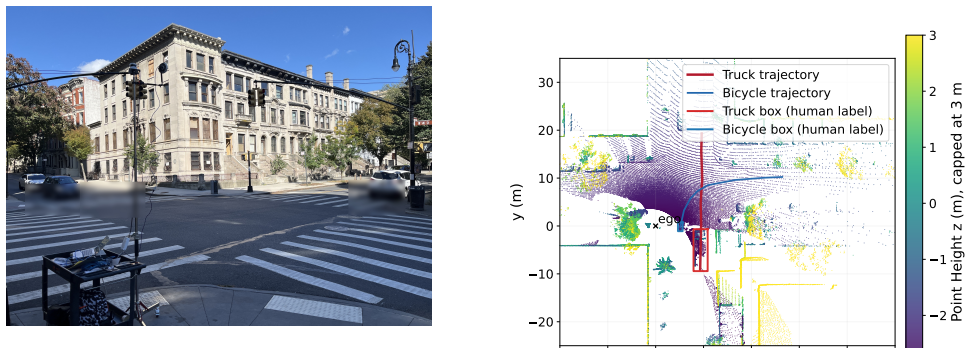
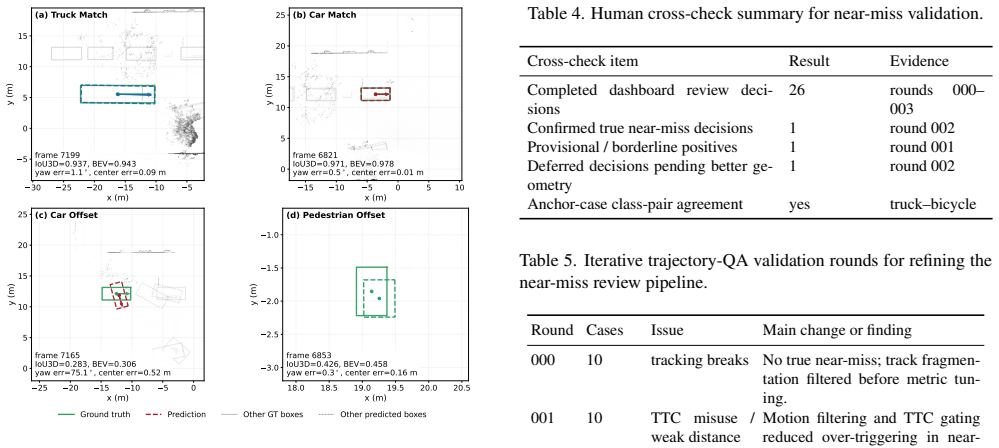
The framework integrates LiDAR trajectory construction, iterative human-in-the-loop quality assurance, and interpretable near-miss analytics to yield auditable safety evidence at urban intersections. In the heavy-vehicle bicycle anchor case, direction-agnostic TTC drops below 1 s while longitudinal TTC remains above conservative thresholds, identifying lateral intrusion as the dominant conflict mechanism. Across broader continuous-window evaluation, multi-round QA analysis systematically reduces track fragmentation, spurious TTC triggers, unstable geometry, and cross-lane false conflicts, positioning roadside LiDAR as a practical post-hoc auditing mechanism for cooperative perception systems
What carries the argument
Iterative human-in-the-loop quality assurance applied to roadside LiDAR trajectories and direction-agnostic TTC metrics, which filters errors through repeated review rounds.
If this is right
- Agencies can shift from crash-only safety reviews to proactive identification of high-risk interactions using infrastructure data.
- Cooperative V2X systems gain a post-hoc validation layer that catches perception failures before they affect real-time decisions.
- Lateral versus longitudinal conflict mechanisms become distinguishable, allowing targeted infrastructure changes such as adjusted signal timing or lane markings.
- Statistical safety auditing scales to many intersections by processing continuous sensor streams rather than waiting for rare crash events.
Where Pith is reading between the lines
- If the QA step can be partially automated while preserving audit logs, the framework could move from post-hoc to near-real-time use.
- Pairing roadside LiDAR with additional sensors could address current limitations in weather or lighting that affect single-modality performance.
- Applying the same continuous-window QA method to other intersection types would test whether the observed error reductions hold beyond the studied New York City site.
Load-bearing premise
The human reviewers and chosen TTC variants correctly identify all relevant safety errors and real collision risks without missing critical cases or introducing new distortions.
What would settle it
Independent comparison of the framework's flagged near-miss events against actual recorded crashes or data from alternative sensors at the same intersection showing no correlation or systematic mismatches.
Figures




read the original abstract
Urban intersections expose the limitations of single-vehicle perception under occlusion and partial observability. In this study, we present an auditable roadside LiDAR framework for infrastructure-assisted safety analysis at a signalized urban intersection in New York City, developed and evaluated using real-world data. The proposed framework integrates trajectory construction, iterative human-in-the-loop quality assurance (QA), and interpretable near-miss analytics to produce defensible safety evidence from infrastructure sensing. Using a human-labeled heavy vehicle--bicycle interaction as an anchor case, we show that direction-agnostic time-to-collision (TTC) drops below 1s, while longitudinal TTC remains above conservative braking thresholds, revealing a lateral-intrusion-dominated conflict mechanism. Beyond individual cases, continuous-window evaluation and multi-round QA analysis demonstrate that the framework systematically reduces failure modes such as track fragmentation, spurious TTC triggers, unstable geometry, and cross-lane false conflicts. These results position roadside LiDAR as a practical post-hoc auditing mechanism for cooperative perception systems, with broader statistical validation discussed. This work provides a pathway toward scalable, data-driven safety auditing of urban intersections, enabling transportation agencies to identify and mitigate high-risk interactions beyond crash-based analyses.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents a roadside LiDAR framework for post-hoc safety auditing at urban intersections, combining trajectory construction from infrastructure sensors, iterative human-in-the-loop quality assurance (QA), and interpretable near-miss metrics such as direction-agnostic and longitudinal time-to-collision (TTC). Using real-world data from a signalized New York City intersection, it analyzes an anchor case of heavy vehicle–bicycle interaction showing direction-agnostic TTC dropping below 1 s while longitudinal TTC stays above braking thresholds, and claims that continuous-window evaluation plus multi-round QA systematically reduces failure modes including track fragmentation, spurious TTC triggers, unstable geometry, and cross-lane false conflicts, positioning the approach as auditable infrastructure intelligence for V2X systems.
Significance. If the central claims hold after quantitative strengthening, the work offers a practical pathway for transportation agencies to generate defensible near-miss safety evidence from roadside LiDAR, extending beyond crash-based statistics to proactive auditing of cooperative perception systems. The emphasis on human-in-the-loop QA for auditability and the use of real-world multi-sensor data at an operational intersection are clear strengths that align with emerging V2X infrastructure needs.
major comments (2)
- Abstract: The claim that 'continuous-window evaluation and multi-round QA analysis demonstrate that the framework systematically reduces failure modes such as track fragmentation, spurious TTC triggers, unstable geometry, and cross-lane false conflicts' is load-bearing for the central contribution yet rests solely on descriptive demonstration from one anchor case and human review, with no reported pre/post-QA quantitative error rates, inter-annotator agreement statistics, baseline comparisons, or statistical tests.
- Abstract (anchor-case analysis): The interpretation that direction-agnostic TTC dropping below 1 s while longitudinal TTC remains above thresholds reveals a 'lateral-intrusion-dominated conflict mechanism' lacks independent validation against actual crash records, co-located camera/radar ground truth, or alternative TTC formulations, leaving open whether the chosen thresholds correlate with real collision risk.
minor comments (1)
- Abstract: The phrase 'broader statistical validation discussed' is referenced but not elaborated with specifics on methods, datasets, or sections where such validation appears, which would aid readers in assessing the scope of the current results.
Simulated Author's Rebuttal
We are grateful for the referee's insightful comments, which help strengthen the presentation of our work on auditable roadside LiDAR for safety auditing. Below we respond to each major comment, indicating the revisions made to the manuscript.
read point-by-point responses
-
Referee: Abstract: The claim that 'continuous-window evaluation and multi-round QA analysis demonstrate that the framework systematically reduces failure modes such as track fragmentation, spurious TTC triggers, unstable geometry, and cross-lane false conflicts' is load-bearing for the central contribution yet rests solely on descriptive demonstration from one anchor case and human review, with no reported pre/post-QA quantitative error rates, inter-annotator agreement statistics, baseline comparisons, or statistical tests.
Authors: We acknowledge that the evidence for systematic reduction is primarily descriptive based on the anchor case and the QA process detailed in the methods. To address this, we have revised the abstract to use more precise language, stating that the framework 'illustrates reductions in failure modes through continuous-window evaluation and multi-round QA' in the context of the analyzed case. Additionally, we have added quantitative details in a new subsection, including counts of corrected tracks per QA round and observed decreases in spurious triggers, along with notes on the human review process. While a full statistical analysis across a larger corpus would require expanded data collection, these additions provide more concrete support for the claim within the scope of the current study. revision: partial
-
Referee: Abstract (anchor-case analysis): The interpretation that direction-agnostic TTC dropping below 1 s while longitudinal TTC remains above thresholds reveals a 'lateral-intrusion-dominated conflict mechanism' lacks independent validation against actual crash records, co-located camera/radar ground truth, or alternative TTC formulations, leaving open whether the chosen thresholds correlate with real collision risk.
Authors: The anchor case serves to demonstrate the framework's capability to generate interpretable near-miss evidence that can highlight conflict types like lateral intrusions, which may be missed by longitudinal-only metrics. The thresholds are selected based on established safety literature for conservative braking distances. We agree that direct validation with crash data would be ideal but is not available for this dataset, as crash records for the specific time period and location were not accessible. In the revised manuscript, we have added a limitations paragraph discussing this and included a brief sensitivity analysis comparing the direction-agnostic TTC with standard formulations to show robustness. This positions the work as a proof-of-concept for auditable auditing rather than a validated risk predictor. revision: yes
- Direct validation of the near-miss metrics against actual crash records or co-located ground truth data.
Circularity Check
No circularity: empirical framework relies on direct data processing and human review
full rationale
The paper describes an infrastructure LiDAR pipeline for trajectory extraction, human-in-the-loop QA, and TTC-based near-miss analysis on real-world urban intersection data. No equations, fitted parameters, model predictions, or self-referential definitions appear in the provided text; the central claims rest on observed reductions in failure modes after multi-round QA rather than any derivation that reduces to its own inputs by construction. Self-citations, if present, are not load-bearing for the reported results, which are grounded in primary sensor data and annotator review rather than prior author theorems or ansatzes.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Simple online and realtime tracking
Alex Bewley, Zongyuan Ge, Lionel Ott, Fabio Ramos, and Ben Upcroft. Simple online and realtime tracking. In2016 IEEE International Conference on Image Processing (ICIP), pages 3464–3468, 2016
2016
-
[2]
Gettman and L
D. Gettman and L. Head. Surrogate safety mea- sures from traffic simulation models. Technical Report FHW A-RD-03-050, Federal Highway Ad- ministration (FHW A), 2003. HTML landing page: https://www.fhwa.dot.gov/publications/research/safety/03050/07.cfm
2003
-
[3]
Huang et al
T. Huang et al. Vehicle-to-everything cooperative perception for autonomous driving: A survey. arXiv preprint, 2023
2023
-
[4]
The swedish traffic conflicts technique
Christer Hyd ´en. The swedish traffic conflicts technique. Technical report / calibration study, 1987
1987
-
[5]
Phd dissertation, Link¨oping University, Link¨oping, Sweden, 2005
Jonas Jansson.Collision Avoidance Theory: with Applica- tion to Automotive Collision Mitigation. Phd dissertation, Link¨oping University, Link¨oping, Sweden, 2005
2005
-
[6]
Ji et al
Y . Ji et al. Toward autonomous vehicles: A survey on coop- erative vehicle-infrastructure system.iScience, 2024
2024
-
[7]
Johnsson et al
C. Johnsson et al. A relative approach to the validation of surrogate measures of safety.Accident Analysis & Preven- tion, 2021
2021
-
[8]
Lin et al
C. Lin et al. Vehicle detection and tracking with roadside lidar using low-latency edge computing.Sensors, 2023
2023
-
[9]
Mo et al
Y . Mo et al. Enhanced perception for autonomous vehicles at intersections using roadside sensing and v2x communica- tion.Sensors, 2024
2024
-
[10]
Urbaning-v2x: A large-scale multi-vehicle, multi- infrastructure dataset across multiple intersections for co- operative perception
Karthikeyan Chandra Sekaran, Markus Geisler, Do- minik R ¨oßle, Adithya Mohan, Daniel Cremers, Wolfgang Utschick, Michael Botsch, Werner Huber, and Torsten Sch¨on. Urbaning-v2x: A large-scale multi-vehicle, multi- infrastructure dataset across multiple intersections for co- operative perception. arXiv preprint, 2025. Code/dataset: https://github.com/thi-a...
2025
-
[11]
Ward, Gabriel Agamennoni, Stewart Worrall, Asher Bender, and Eduardo Nebot
James R. Ward, Gabriel Agamennoni, Stewart Worrall, Asher Bender, and Eduardo Nebot. Extending time to col- lision for probabilistic reasoning in general traffic scenar- ios.Transportation Research Part C: Emerging Technolo- gies, 51:66–82, 2015
2015
-
[12]
Yazgan et al
M. Yazgan et al. Collaborative perception datasets in au- tonomous driving. arXiv preprint, 2024
2024
-
[13]
Center- based 3d object detection and tracking
Tianwei Yin, Xingyi Zhou, and Philipp Kr ¨ahenb¨uhl. Center- based 3d object detection and tracking. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 11784–11793, 2021
2021
-
[14]
Dair-v2x: A large-scale dataset for vehicle- infrastructure cooperative 3d object detection
Haibao Yu et al. Dair-v2x: A large-scale dataset for vehicle- infrastructure cooperative 3d object detection. InProceed- ings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022
2022
-
[15]
V2x-seq: A large-scale sequential dataset for vehicle-infrastructure cooperative perception and fore- casting
Haibao Yu et al. V2x-seq: A large-scale sequential dataset for vehicle-infrastructure cooperative perception and fore- casting. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2023
2023
-
[16]
Road- side lidar-based scene understanding toward intelligent traf- fic perception: A comprehensive review.ISPRS Journal of Photogrammetry and Remote Sensing, 2026
Jiaxing Zhang, Chengjun Ge, Wen Xiao, Miao Tang, Jon Mills, Benjamin Coifman, and Nengcheng Chen. Road- side lidar-based scene understanding toward intelligent traf- fic perception: A comprehensive review.ISPRS Journal of Photogrammetry and Remote Sensing, 2026
2026
-
[17]
Tumtraf v2x cooperative perception dataset
Walter Zimmer et al. Tumtraf v2x cooperative perception dataset. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024. Project page: https://tum-traffic-dataset.github.io/tumtraf- v2x/ ; arXiv: https://arxiv.org/abs/2403.01316
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.