CLAW: Composable Language-Annotated Whole-body Motion Generation
Pith reviewed 2026-05-10 15:12 UTC · model grok-4.3
The pith
CLAW generates large-scale language-annotated whole-body motion data for humanoid robots by composing kinematic primitives and simulating physical trajectories.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
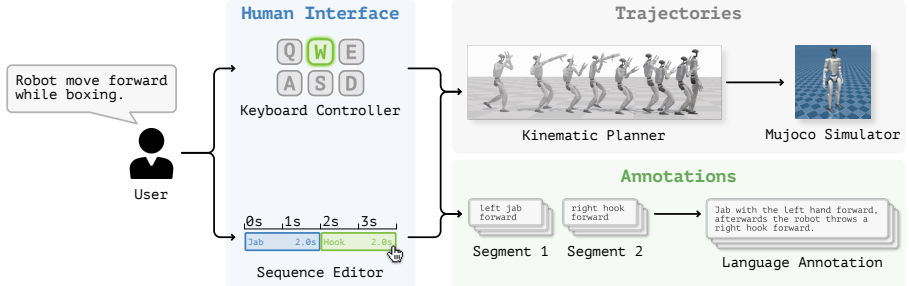
CLAW is a pipeline for scalable generation of language-annotated whole-body motion data for the Unitree G1 humanoid robot. It composes motion primitives from a kinematic planner parameterized by movement, heading, speed, pelvis height, and duration, provides browser-based keyboard and timeline interfaces for data collection, tracks the references with a low-level controller in MuJoCo simulation to produce physically grounded trajectories, and uses a template-based engine to generate diverse natural-language annotations at both segment and trajectory levels.
What carries the argument
The CLAW pipeline that composes parameterized kinematic motion primitives, tracks them via low-level control in physics simulation for physical grounding, and pairs the results with template-generated language annotations.
If this is right
- The system can produce motion-language pairs at scale without requiring motion-capture hardware.
- The resulting data supports training of language-conditioned whole-body controllers for humanoid robots.
- Browser interfaces enable both interactive exploration and batch generation of trajectories.
- Physics simulation ensures trajectories respect stability and contact constraints before annotation.
- Public release of the pipeline allows community extension for additional robot platforms or tasks.
Where Pith is reading between the lines
- Adapting the planner and controller could extend the approach to other humanoid hardware with minimal redesign.
- Replacing or augmenting templates with learned language models might increase annotation variety beyond fixed structures.
- The generated pairs could serve as pretraining data for models that map language directly to low-level robot commands.
Load-bearing premise
The low-level controller in MuJoCo will successfully track the kinematic references to produce stable, physically feasible trajectories without falling or violating contact constraints, while the template engine will generate sufficiently diverse and natural language annotations at scale.
What would settle it
A high frequency of simulation rollouts in which the robot falls, violates joint limits, or loses contact stability would show that the generated trajectories are not physically grounded as claimed.
Figures






read the original abstract
Training language-conditioned whole-body controllers for humanoid robots demands large-scale motion-language datasets. Existing approaches based on motion capture are costly and limited in diversity, while text-to-motion generative models produce purely kinematic outputs that are not guaranteed to be physically feasible. We present CLAW, a pipeline for scalable generation of language-annotated whole-body motion data for the Unitree G1 humanoid robot. CLAW composes motion primitives from a kinematic planner, parameterized by movement, heading, speed, pelvis height, and duration, and provides two browser-based interfaces--a real-time keyboard mode and a timeline-based sequence editor--for exploratory and batch data collection. A low-level controller tracks these references in MuJoCo simulation, yielding physically grounded trajectories. In parallel, a template-based engine generates diverse natural-language annotations at both segment and trajectory levels. To support scalable generation of motion-language paired data for humanoid robot learning, we make our system publicly available at: https://github.com/JianuoCao/CLAW
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents CLAW, an open-source pipeline for scalable generation of language-annotated whole-body motion data for the Unitree G1 humanoid robot. CLAW composes motion primitives from a kinematic planner parameterized by movement, heading, speed, pelvis height, and duration; offers two browser-based interfaces (real-time keyboard mode and timeline-based sequence editor) for data collection; tracks the resulting references with a low-level controller in MuJoCo simulation to produce physically grounded trajectories; and employs a template-based engine to generate natural-language annotations at both segment and trajectory levels.
Significance. If the described components function as specified, CLAW supplies a practical, reproducible tool for creating large-scale motion-language datasets that are both diverse and physically feasible, directly addressing the high cost and limited diversity of motion-capture methods as well as the physical infeasibility of purely kinematic generative models. The public GitHub release, browser interfaces, and explicit parameterization of primitives constitute clear strengths for accessibility and extensibility in humanoid robot learning research.
major comments (1)
- [Abstract and low-level controller description] Abstract and low-level controller description: The central claim that the low-level controller 'yields physically grounded trajectories' is not accompanied by any reported tracking success rates, error statistics, stability metrics, or failure modes across generated motions. This evidence is load-bearing for the physical-feasibility guarantee that distinguishes the pipeline from purely kinematic approaches.
minor comments (2)
- [Motion primitive parameterization] Motion primitive parameterization: The free parameters (movement, heading, speed, pelvis height, duration) are enumerated but the manuscript does not specify their allowable ranges, sampling distributions, or composition constraints, which would aid reproducibility of the claimed scalability.
- [Annotation engine] Annotation engine: The template-based language generation is described at a high level; concrete examples of segment-level versus trajectory-level annotations and any post-processing for naturalness would clarify the diversity claim.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and positive recommendation for minor revision. We appreciate the recognition of CLAW's value as a practical tool for generating diverse, physically feasible motion-language data. We address the major comment below.
read point-by-point responses
-
Referee: The central claim that the low-level controller 'yields physically grounded trajectories' is not accompanied by any reported tracking success rates, error statistics, stability metrics, or failure modes across generated motions. This evidence is load-bearing for the physical-feasibility guarantee that distinguishes the pipeline from purely kinematic approaches.
Authors: We agree that quantitative tracking metrics would strengthen the manuscript's distinction from purely kinematic methods. The current description relies on the use of MuJoCo's physics engine for reference tracking to ensure physical feasibility, but we acknowledge the absence of explicit success rates, error statistics, or failure mode analysis in the abstract and low-level controller section. In the revised version, we will add a dedicated paragraph (or short subsection) under the low-level controller description that reports aggregate tracking performance across the generated dataset, including average joint-position and pelvis-tracking RMSE, the fraction of trajectories that complete without falling or excessive deviation, and a brief discussion of common failure modes (e.g., when commanded speeds exceed actuator limits). These additions will be supported by example plots or tables and will directly address the load-bearing nature of the physical-grounding claim. revision: yes
Circularity Check
No significant circularity
full rationale
The paper describes an engineering pipeline for composing kinematic motion primitives, tracking them in MuJoCo simulation, and generating template-based language annotations. No mathematical derivations, predictions, fitted parameters, or first-principles results are claimed. The contribution is the release of the system itself, whose validity is directly testable via the linked repository rather than reduced to any self-referential quantity or self-citation chain. No load-bearing steps match the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
free parameters (1)
- movement, heading, speed, pelvis height, duration
axioms (2)
- domain assumption MuJoCo simulation accurately models the dynamics and contact physics of the Unitree G1 humanoid sufficiently for reference tracking to produce feasible motions.
- domain assumption Template-based language generation produces diverse and natural annotations at segment and trajectory levels.
Reference graph
Works this paper leans on
-
[1]
Perpetual humanoid control for real-time simulated avatars,
Z. Luo, J. Cao, A. Weng, K. Kitani, and W. Xu, “Perpetual humanoid control for real-time simulated avatars,” inInternational Conference on Computer Vision (ICCV), 2023
work page 2023
-
[2]
DeepMimic: Example-guided deep reinforcement learning of physics-based character skills,
X. B. Peng, P. Abbeel, S. Levine, and M. van de Panne, “DeepMimic: Example-guided deep reinforcement learning of physics-based character skills,”ACM Transactions on Graphics (Proc. SIGGRAPH), vol. 37, no. 4, 2018
work page 2018
-
[3]
Retargeting matters: General motion retargeting for humanoid motion tracking,
J. P. Araujo, Y . Ze, P. Xu, J. Wu, and C. K. Liu, “Retargeting matters: General motion retargeting for humanoid motion tracking,”
- [4]
-
[5]
AMASS: Archive of motion capture as surface shapes,
N. Mahmood, N. Ghorbani, N. F. Troje, G. Pons-Moll, and M. J. Black, “AMASS: Archive of motion capture as surface shapes,” in International Conference on Computer Vision (ICCV), 2019
work page 2019
-
[6]
arXiv preprint arXiv:2603.15546 , year=
D. Rempe, M. Petrovich, Y . Yuan, H. Zhang, X. B. Peng, Y . Jiang, T. Wang, U. Iqbal, D. Minor, M. de Ruyter, J. Li, C. Tessler, E. Lim, E. Jeong, S. Wu, E. Hassani, M. Huang, J.-B. Yu, C. Chung, L. Song, O. Dionne, J. Kautz, S. Yuen, and S. Fidler, “Kimodo: Scaling control- lable human motion generation,”arXiv:2603.15546, 2026
-
[7]
Z. Luo, Y . Yuan, T. Wang, C. Li, S. Chen, F. Casta ˜neda, Z.-A. Cao, J. Li, D. Minor, Q. Ben, X. Da, R. Ding, C. Hogg, L. Song, E. Lim, E. Jeong, T. He, H. Xue, W. Xiao, Z. Wang, S. Yuen, J. Kautz, Y . Chang, U. Iqbal, L. J. Fan, and Y . Zhu, “Sonic: Supersizing motion tracking for natural humanoid whole-body control,” 2025. [Online]. Available: https://...
work page internal anchor Pith review arXiv 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.