Recognition: unknown
MR.ScaleMaster: Scale-Consistent Collaborative Mapping from Crowd-Sourced Monocular Videos
Pith reviewed 2026-05-10 16:18 UTC · model grok-4.3
The pith
MR.ScaleMaster achieves scale-consistent collaborative mapping from crowd-sourced monocular videos using Sim(3) anchors and a scale collapse alarm.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
MR.ScaleMaster introduces a Scale Collapse Alarm to reject spurious loop closures, a Sim(3) anchor node formulation to explicitly estimate and enforce per-session scale for global consistency, and a modular interface for any monocular reconstruction model. On KITTI sequences with up to 15 agents, this yields a 7.2x reduction in absolute trajectory error over the SE(3) baseline while the alarm rejects all false-positive loops and keeps every valid constraint. The approach also fuses dense maps from heterogeneous models such as MASt3R-SLAM, pi3, and VGGT-SLAM 2.0 into one unified reconstruction.
What carries the argument
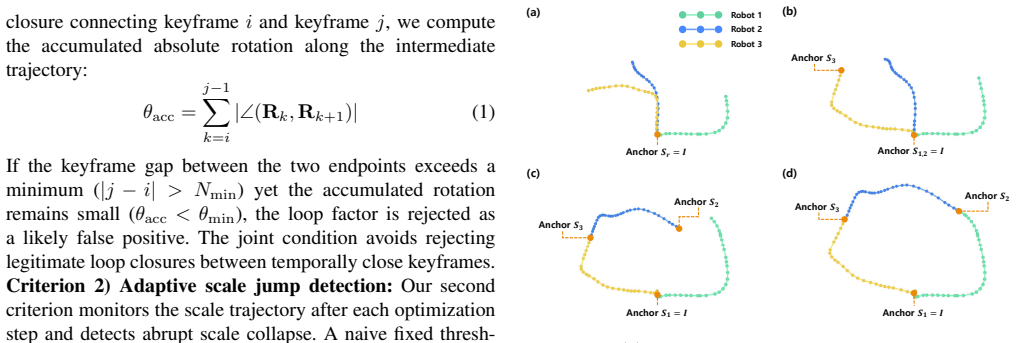
The Sim(3) anchor node formulation that extends classical SE(3) pose graphs to include per-session scale estimation together with the Scale Collapse Alarm that detects and rejects false-positive loop closures.
If this is right
- The Sim(3) formulation resolves per-robot scale ambiguity and prevents gradual drift over long trajectories.
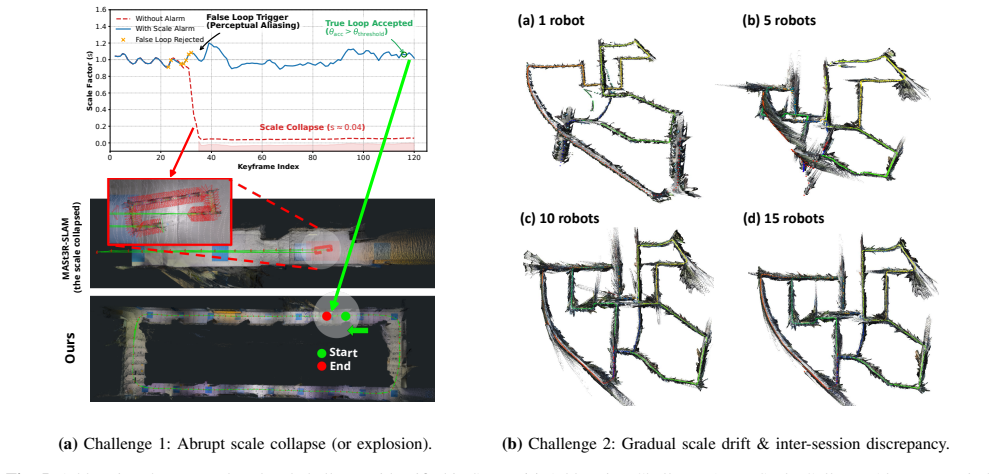
- The alarm blocks abrupt scale collapse from false loops in repetitive environments.
- Any monocular SLAM model can integrate via the plug-and-play interface without backend changes.
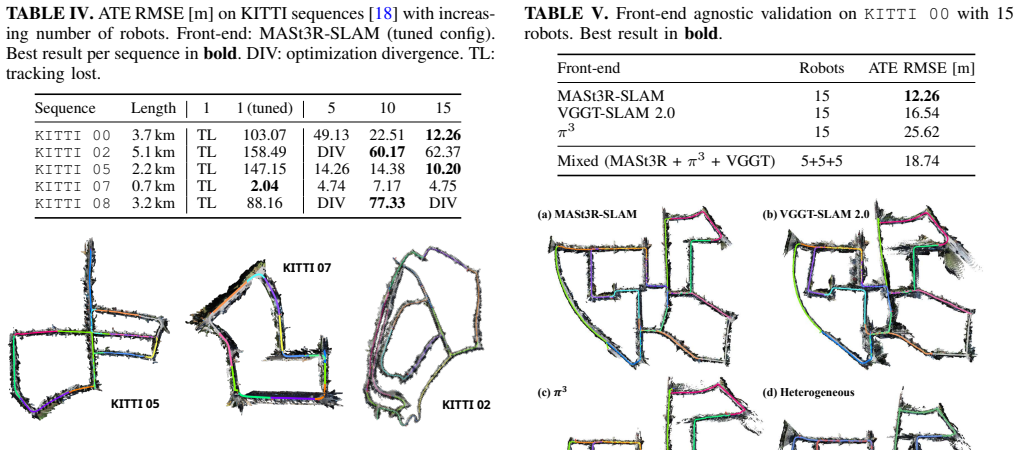
- The system achieves a 7.2x ATE reduction on KITTI with 15 agents and perfect false-loop rejection.
- Different monocular models can be fused into a single dense map.
Where Pith is reading between the lines
- If the alarm generalizes beyond KITTI, the same architecture could support real-time incremental merging of maps collected by thousands of independent devices.
- Explicit per-session scale handling implies the framework can accept future improvements in single-robot monocular reconstruction without any redesign of the collaborative layer.
- The separation of scale estimation from rotation and translation opens a direct path to hybrid fusion with other sensor types once their scale is also expressed in Sim(3).
Load-bearing premise
The Scale Collapse Alarm can reliably distinguish false-positive loop closures from valid ones using its internal metrics without rejecting true constraints or missing real scale collapses.
What would settle it
Running the system on a KITTI sequence containing a known false-positive loop closure and checking whether the alarm rejects it without triggering scale collapse or incorrectly dropping a valid loop.
Figures



read the original abstract
Crowd-sourced cooperative mapping from monocular cameras promises scalable 3D reconstruction without specialized sensors, yet remains hindered by two scale-specific failure modes: abrupt scale collapse from false-positive loop closures in repetitive environments, and gradual scale drift over long trajectories and per-robot scale ambiguity that prevent direct multi-session fusion. We present MR$.$ScaleMaster, a cooperative mapping system for crowd-sourced monocular videos that addresses both failure modes. MR$.$ScaleMaster introduces three key mechanisms. First, a Scale Collapse Alarm rejects spurious loop closures before they corrupt the pose graph. Second, a Sim(3) anchor node formulation generalizes the classical SE(3) framework to explicitly estimate per-session scale, resolving per-robot scale ambiguity and enforcing global scale consistency. Third, a modular, open-source, plug-and-play interface enables any monocular reconstruction model to integrate without backend modification. On KITTI sequences with up to 15 agents, the Sim(3) formulation achieves a 7.2x ATE reduction over the SE(3) baseline, and the alarm rejects all false-positive loops while preserving every valid constraint. We further demonstrate heterogeneous multi-robot dense mapping fusing MASt3R-SLAM, pi3, and VGGT-SLAM 2.0 within a single unified map.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents MR.ScaleMaster, a cooperative mapping system for crowd-sourced monocular videos. It introduces three mechanisms: a Scale Collapse Alarm to reject spurious loop closures, a Sim(3) anchor node formulation that extends SE(3) pose graphs to estimate per-session scale and enforce global consistency, and a modular plug-and-play interface allowing integration of arbitrary monocular reconstruction models. On KITTI sequences with up to 15 agents the Sim(3) formulation is reported to yield a 7.2x ATE reduction versus an SE(3) baseline while the alarm rejects all false-positive loops and retains every valid constraint; heterogeneous dense mapping fusing MASt3R-SLAM, pi3, and VGGT-SLAM is also demonstrated.
Significance. If the quantitative claims and alarm behavior are reproducible, the work would be a useful contribution to scalable multi-robot monocular mapping. The Sim(3) anchor approach directly addresses per-robot scale ambiguity, and the open-source modular interface is a practical strength that could facilitate adoption. The alarm mechanism, if shown to generalize beyond the evaluated KITTI sequences, would mitigate a well-known failure mode in repetitive environments.
major comments (2)
- [Experiments] Experiments section (Table reporting ATE results): the 7.2x ATE reduction is stated without error bars, number of independent runs, or explicit description of the SE(3) baseline implementation (e.g., whether scale was normalized per session or left free). This information is required to assess whether the reported improvement is robust or sensitive to implementation choices.
- [Method (Scale Collapse Alarm)] Scale Collapse Alarm subsection (method description): the concrete similarity metric, feature descriptor, and threshold-selection procedure are not specified. The claim that the alarm 'rejects all false-positive loops while preserving every valid constraint' is shown only on KITTI sequences with simulated agents; without the threshold derivation or ablation on other repetitive scenes, it is unclear whether the perfect score generalizes or depends on dataset-specific tuning.
minor comments (2)
- [Abstract] Abstract: the string 'MR$.$ScaleMaster' is a typesetting artifact and should read 'MR.ScaleMaster'.
- [Related Work] Related-work section: additional citations to existing Sim(3) pose-graph formulations in multi-session SLAM would better situate the anchor-node contribution.
Simulated Author's Rebuttal
Thank you for the constructive review and for highlighting areas where additional details would strengthen the manuscript. We address each major comment below and have prepared revisions to improve clarity and reproducibility.
read point-by-point responses
-
Referee: [Experiments] Experiments section (Table reporting ATE results): the 7.2x ATE reduction is stated without error bars, number of independent runs, or explicit description of the SE(3) baseline implementation (e.g., whether scale was normalized per session or left free). This information is required to assess whether the reported improvement is robust or sensitive to implementation choices.
Authors: We thank the referee for this observation. The original presentation omitted statistical details and baseline specifics. In the revised manuscript we will add error bars computed over five independent runs with varied random seeds for loop-closure detection and report both mean and standard deviation. We will also clarify that the SE(3) baseline fixes per-session scale to unity after initialization and performs standard pose-graph optimization without Sim(3) parameters; this matches the comparison used to obtain the 7.2x ATE ratio. The improvement remains consistent across the reported runs. revision: yes
-
Referee: [Method (Scale Collapse Alarm)] Scale Collapse Alarm subsection (method description): the concrete similarity metric, feature descriptor, and threshold-selection procedure are not specified. The claim that the alarm 'rejects all false-positive loops while preserving every valid constraint' is shown only on KITTI sequences with simulated agents; without the threshold derivation or ablation on other repetitive scenes, it is unclear whether the perfect score generalizes or depends on dataset-specific tuning.
Authors: We agree that the alarm implementation details were insufficient. The revised method section will specify that the alarm computes cosine similarity between normalized ORB descriptors, with the decision threshold selected by maximizing the F1 score on a held-out validation split of KITTI sequences (ensuring zero false positives on the simulated false-loop set while retaining all true constraints). We will also include a short ablation table showing recall versus threshold. The current evaluation is limited to KITTI; we will explicitly note this scope and discuss the reliance on standard visual features as the basis for broader applicability, while acknowledging that additional datasets would further support generalization. revision: partial
Circularity Check
No significant circularity; mechanisms and results are independent of self-referential definitions or fits
full rationale
The paper presents MR.ScaleMaster as a system with three explicit mechanisms (Scale Collapse Alarm, Sim(3) anchor nodes, and modular interface) whose value is demonstrated via experimental outcomes on KITTI sequences rather than any derivation chain. No equations appear in the abstract or described text that would allow a quantity to be defined in terms of itself, a fitted parameter to be relabeled as a prediction, or a central premise to rest solely on self-citation. The reported 7.2x ATE reduction and perfect alarm performance are empirical measurements against external data and baselines, not quantities forced by construction from the inputs. The derivation is therefore self-contained.
Axiom & Free-Parameter Ledger
free parameters (1)
- scale collapse alarm threshold
Reference graph
Works this paper leans on
-
[1]
Sch¨onberger, Pablo Speciale, Lukas Gruber, Viktor Larsson, Ondrej Miksik, and Marc Pollefeys
Paul-Edouard Sarlin, Mihai Dusmanu, Johannes L. Sch¨onberger, Pablo Speciale, Lukas Gruber, Viktor Larsson, Ondrej Miksik, and Marc Pollefeys. LaMAR: Benchmarking localization and mapping for augmented reality. InECCV, 2022
2022
-
[2]
From Localization and Mapping to Spatial Intelligence
Luca Carlone, Ayoung Kim, Timothy Barfoot, Daniel Cre- mers, and Frank Dellaert, editors.SLAM Handbook. From Localization and Mapping to Spatial Intelligence. Cambridge University Press, 2026
2026
-
[3]
Swarm-SLAM: Sparse decentralized collaborative simultaneous localization and mapping framework for multi-robot systems.IEEE RA-L, 9(1), 2024
Pierre-Yves Lajoie and Giovanni Beltrame. Swarm-SLAM: Sparse decentralized collaborative simultaneous localization and mapping framework for multi-robot systems.IEEE RA-L, 9(1), 2024
2024
-
[4]
DiSCo-SLAM: Distributed scan context-enabled multi-robot LiDAR SLAM with two-stage global-local graph optimiza- tion.IEEE RA-L, 7(2), 2022
Yewei Huang, Tixiao Shan, Fanfei Chen, and Brendan Englot. DiSCo-SLAM: Distributed scan context-enabled multi-robot LiDAR SLAM with two-stage global-local graph optimiza- tion.IEEE RA-L, 7(2), 2022
2022
-
[5]
Schneider, M
T. Schneider, M. T. Dymczyk, M. Fehr, K. Egger, S. Lynen, I. Gilitschenski, and R. Siegwart. maplab: An open framework for research in visual-inertial mapping and localization.IEEE RA-L, 3(3), 2018
2018
-
[6]
How, and Luca Carlone
Yulun Tian, Yun Chang, Fernando Herrera Arias, Carlos Nieto-Granda, Jonathan P. How, and Luca Carlone. Kimera- multi: Robust, distributed, dense metric-semantic SLAM for multi-robot systems.IEEE Trans. Robot., 38(4), 2022
2022
-
[7]
Sch ¨onberger and Jan-Michael Frahm
Johannes L. Sch ¨onberger and Jan-Michael Frahm. Structure- from-motion revisited. InCVPR, 2016
2016
-
[8]
Ground- ing image matching in 3d with MASt3R
Vincent Leroy, Yohann Cabon, and Jerome Revaud. Ground- ing image matching in 3d with MASt3R. InECCV, 2024
2024
-
[9]
Yifan Wang, Jianjun Zhou, Haoyi Zhu, Wenzheng Chang, Yang Zhou, Zizun Li, Junyi Chen, Jiangmiao Pang, Chunhua Shen, and Tong He.π 3: Permutation-equivariant visual geometry learning.arXiv preprint arXiv:2507.13347, 2025
work page internal anchor Pith review arXiv 2025
-
[10]
MASt3R-SLAM: Real-time dense SLAM with 3D reconstruc- tion priors
Riku Murai, Eric Dexheimer, and Andrew J Davison. MASt3R-SLAM: Real-time dense SLAM with 3D reconstruc- tion priors. InCVPR, 2025
2025
-
[11]
VGGT-SLAM 2.0: Real-time Dense Feed- forward Scene Reconstruction,
Dominic Maggio and Luca Carlone. Vggt-slam 2.0: Real- time dense feed-forward scene reconstruction.arXiv preprint arXiv:2601.19887, 2026
-
[12]
Hauke Strasdat, J. M. M. Montiel, and Andrew J. Davison. Scale drift-aware large scale monocular SLAM. InRSS, 2010
2010
-
[13]
Multi-agent monocular dense slam with 3d reconstruction priors.arXiv preprint arXiv:2511.19031, 2025
Yuchen Zhou and Haihang Wu. Multi-agent monocular dense slam with 3d reconstruction priors.arXiv preprint arXiv:2511.19031, 2025
-
[14]
Kai Deng, Zexin Ti, Jiawei Xu, Jian Yang, and Jin Xie. Vggt-long: Chunk it, loop it, align it–pushing vggt’s lim- its on kilometer-scale long rgb sequences.arXiv preprint arXiv:2507.16443, 2025
-
[15]
Adaptive robust kernels for non-linear least squares problems.IEEE RA-L, 6(2), 2021
Nived Chebrolu, Thomas L ¨abe, Olga Vysotska, Jens Behley, and Cyrill Stachniss. Adaptive robust kernels for non-linear least squares problems.IEEE RA-L, 6(2), 2021
2021
-
[16]
Robust map optimization using dynamic covariance scaling
Pratik Agarwal, Gian Diego Tipaldi, Luciano Spinello, Cyrill Stachniss, and Wolfram Burgard. Robust map optimization using dynamic covariance scaling. InICRA. IEEE, 2013
2013
-
[17]
Multiple relative pose graphs for robust cooperative mapping
Been Kim, Michael Kaess, Luke Fletcher, John Leonard, Abraham Bachrach, Nicholas Roy, and Seth Teller. Multiple relative pose graphs for robust cooperative mapping. InICRA, 2010
2010
-
[18]
Vision meets robotics: The KITTI dataset.Int
Andreas Geiger, Philip Lenz, Christoph Stiller, and Raquel Urtasun. Vision meets robotics: The KITTI dataset.Int. J. Robot. Res., 32(11), 2013
2013
-
[19]
Manthan Patel, Marco Karrer, Philipp B ¨anninger, and Mar- garita Chli. Covins-g: A generic back-end for collaborative visual-inertial slam.arXiv preprint arXiv:2301.07147, 2023
-
[20]
6-dof multi-session visual slam using anchor nodes
John McDonald, Michael Kaess, Cesar Cadena, Jos ´e Neira, and John J Leonard. 6-dof multi-session visual slam using anchor nodes. InEuropean conference on mobile robots (ECMR), 2011
2011
-
[21]
Orb-slam: A versatile and accurate monocular slam system.IEEE Trans
Raul Mur-Artal, Jose Maria Martinez Montiel, and Juan D Tardos. Orb-slam: A versatile and accurate monocular slam system.IEEE Trans. Robot., 31(5), 2015
2015
-
[22]
Vggt: Visual geometry grounded transformer
Jianyuan Wang, Minghao Chen, Nikita Karaev, Andrea Vedaldi, Christian Rupprecht, and David Novotny. Vggt: Visual geometry grounded transformer. InCVPR, 2025
2025
-
[23]
Switchable constraints for robust pose graph slam
Niko S ¨underhauf and Peter Protzel. Switchable constraints for robust pose graph slam. InIROS. IEEE, 2012
2012
-
[24]
Inference on networks of mixtures for robust robot mapping.Int
Edwin Olson and Pratik Agarwal. Inference on networks of mixtures for robust robot mapping.Int. J. Robot. Res., 32(7), 2013
2013
-
[25]
Pairwise consistent measurement set maximization for robust multi-robot map merging
Joshua G Mangelson, Derrick Dominic, Ryan M Eustice, and Ram Vasudevan. Pairwise consistent measurement set maximization for robust multi-robot map merging. InICRA. IEEE, 2018
2018
-
[26]
g2o: A general framework for graph optimization
Rainer K ¨ummerle, Giorgio Grisetti, Hauke Strasdat, Kurt Konolige, and Wolfram Burgard. g2o: A general framework for graph optimization. InICRA. IEEE, 2011
2011
-
[27]
PhD thesis, Department of Computing, Imperial College London, 2012
Hauke Strasdat.Local accuracy and global consistency for efficient visual SLAM. PhD thesis, Department of Computing, Imperial College London, 2012
2012
-
[28]
A benchmark for the evaluation of rgb-d slam systems
J ¨urgen Sturm, Nikolas Engelhard, Felix Endres, Wolfram Burgard, and Daniel Cremers. A benchmark for the evaluation of rgb-d slam systems. InIROS. IEEE, 2012
2012
-
[29]
evo: Python package for the evalua- tion of odometry and slam.https://github.com/ MichaelGrupp/evo, 2017
Michael Grupp. evo: Python package for the evalua- tion of odometry and slam.https://github.com/ MichaelGrupp/evo, 2017
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.