Recognition: unknown
Additively manufactured Shape Memory Alloy Hybrid Composites with a polymer matrix featuring a re-entrant honeycomb structure
Pith reviewed 2026-05-10 11:26 UTC · model grok-4.3
The pith
Combining stereolithography and tailored fiber placement creates shape memory alloy hybrid composites that bend controllably when heated.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
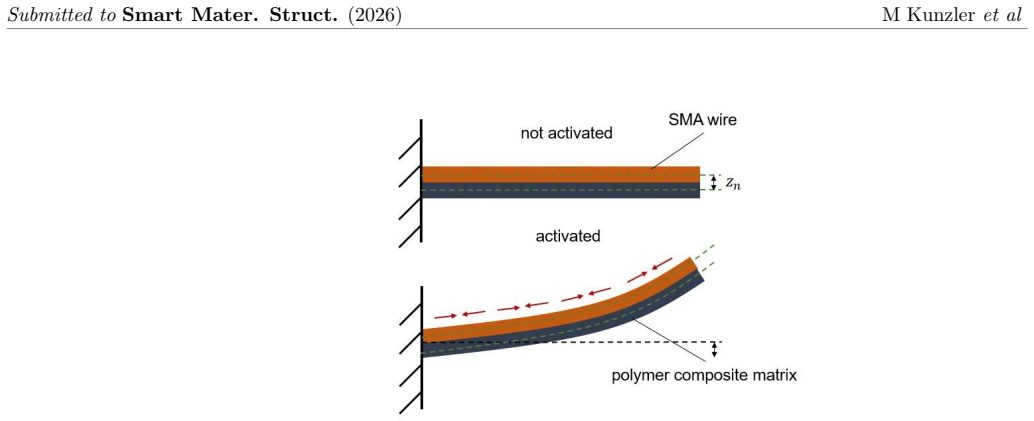
Stereolithography and Tailored Fiber Placement were combined to fabricate shape memory alloy hybrid composites featuring a three-layer structure and exhibiting out of plane bending deformation when activated, in a fully integrated, additive manufacturing process. SMA wires as active elements were attached to a textile reinforcement layer, which then was embedded within a UV-curable polymer matrix and combined with a geometrically tailored toplayer, featuring the re-entrant honeycomb architecture. Exploiting the design freedom of SLA, the overall mechanical response of the SMAHC can be systematically adjusted, enabling controlled out-of-plane bending during thermal activation. The automated T
What carries the argument
Re-entrant honeycomb toplayer geometry printed by SLA atop an SMA-wire-embedded polymer matrix, which adjusts stiffness and channels thermal expansion into controlled out-of-plane bending.
If this is right
- Geometric parameters of the re-entrant honeycomb can be varied to tune the composite's stiffness and resulting deformation amplitude.
- Automated TFP integration produces more symmetric and reproducible bending than manual wire placement.
- The fully additive route supports direct fabrication of structurally integrated morphing systems without secondary bonding steps.
- Synchronized optical measurements on eight configurations confirm that design changes translate into predictable changes in actuation behavior.
Where Pith is reading between the lines
- The same layering strategy could be adapted to embed multiple wire orientations for bending in more than one plane.
- Scaling the process to larger parts might enable lightweight adaptive surfaces in aerospace or biomedical devices.
- Combining the printed honeycomb with other stimuli-responsive fillers could produce composites that respond to both heat and light.
- Embedding additional functional elements such as strain sensors during the same SLA build would create closed-loop morphing structures.
Load-bearing premise
The SLA curing process and TFP integration do not degrade the shape memory effect of the wires or create interfacial defects that would prevent reliable thermal actuation.
What would settle it
Thermal cycling of the printed composites produces no measurable out-of-plane bending or shows progressive loss of actuation stroke, or microscopy of cross-sections reveals wire damage or delamination at the matrix interface.
Figures















read the original abstract
Stereolithography (SLA) and Tailored Fiber Placement (TFP) were combined to fabricate shape memory alloy hybrid composites (SMAHC) featuring a three-layer structure and exhibiting out of plane bending deformation when activated, in a fully integrated, additive manufacturing process. SMA wires as active elements were attached to a textile reinforcement layer, which then was embedded within a UV-curable polymer matrix and combined with a geometrically tailored toplayer, featuring the re-entrant honeycomb architecture. Exploiting the design freedom of SLA, the overall mechanical response of the SMAHC can be systematically adjusted, enabling controlled out-of-plane bending during thermal activation. Two different SMA integration strategies - manual embedding and automated TFP were investigated to assess their influence on actuation behavior, reproducibility, and deformation behaviour. A total of eight geometric configurations were manufactured and experimentally characterized using synchronized optical measurements. The results demonstrate that the combination of SLA-based fabrication and textile-mediated SMA integration enables precise control over the actuation response, while the use of re-entrant honeycomb structures provides an effective approach to tailor stiffness and deformation characteristics. In particular, the automated TFP integration yields improved reproducibility and more symmetric deformation behavior compared to manual fabrication. The presented approach establishes a fully additive manufacturing route for SMAHCs, enabling the realization of structurally integrated, morphing composite systems with programmable mechanical properties.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript describes combining stereolithography (SLA) and tailored fiber placement (TFP) to fabricate shape memory alloy hybrid composites (SMAHCs) consisting of a three-layer structure with SMA wires embedded in a UV-curable polymer matrix topped by a re-entrant honeycomb layer. Eight geometric configurations were produced using manual and automated SMA integration strategies and characterized via synchronized optical measurements of out-of-plane bending upon thermal activation. The authors conclude that the approach enables precise control over actuation response, improved reproducibility with automated TFP, and programmable mechanical properties through geometric tailoring.
Significance. If the central claim holds, the work would be significant for applied physics and composites engineering by demonstrating a fully additive route to structurally integrated, morphing SMAHCs. The exploitation of SLA design freedom for stiffness tailoring via re-entrant honeycombs and the direct comparison of manual versus automated fiber placement for actuation symmetry represent practical advances toward programmable active composites in aerospace or robotics applications.
major comments (2)
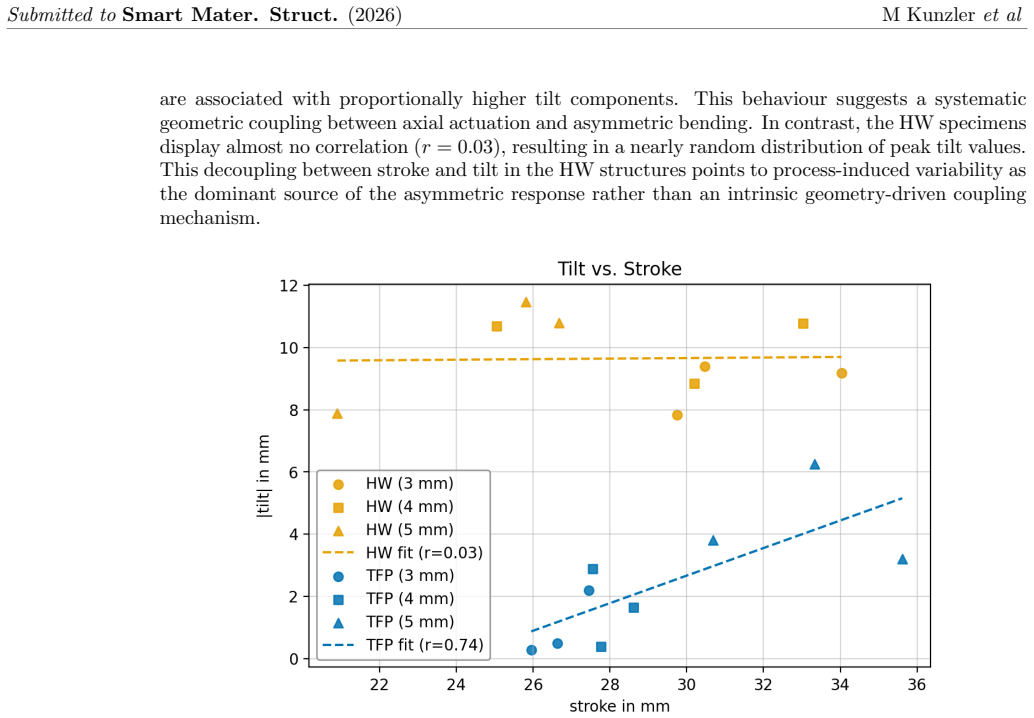
- [Abstract and Results] Abstract and results description: the claim of 'precise control over the actuation response' and 'improved reproducibility' with automated TFP rests on optical measurements of eight configurations, yet the manuscript provides no quantitative values (e.g., bending angles, radii of curvature), error bars, or statistical comparisons between manual and TFP samples. This absence directly weakens the assertion that the method enables programmable properties.
- [Results] Results section: the central claim of a viable additive manufacturing route for functional SMAHCs requires that the SMA wires retain their martensitic transformation and recovery behavior after SLA curing and TFP integration. No pre-/post-fabrication DSC data, recovery strain measurements, or cyclic stability tests are reported to exclude degradation from UV exposure, resin chemistry, or interfacial defects, leaving the functionality unconfirmed.
minor comments (1)
- [Abstract] The abstract mentions 'synchronized optical measurements' without specifying the imaging setup, frame rate, or calibration method used to quantify deformation.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed comments. We address each major comment point by point below, indicating revisions where appropriate to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract and Results] Abstract and results description: the claim of 'precise control over the actuation response' and 'improved reproducibility' with automated TFP rests on optical measurements of eight configurations, yet the manuscript provides no quantitative values (e.g., bending angles, radii of curvature), error bars, or statistical comparisons between manual and TFP samples. This absence directly weakens the assertion that the method enables programmable properties.
Authors: We agree that explicit quantitative reporting would strengthen the claims. Although the synchronized optical measurements of out-of-plane bending for the eight configurations are shown in the figures, the text does not extract specific values such as bending angles or radii of curvature, nor does it include error bars or statistical comparisons. In the revised manuscript, we will add these quantitative details from the existing measurement data, along with error bars and a statistical comparison between manual and automated TFP samples, to better support the assertions of precise control and improved reproducibility. revision: yes
-
Referee: [Results] Results section: the central claim of a viable additive manufacturing route for functional SMAHCs requires that the SMA wires retain their martensitic transformation and recovery behavior after SLA curing and TFP integration. No pre-/post-fabrication DSC data, recovery strain measurements, or cyclic stability tests are reported to exclude degradation from UV exposure, resin chemistry, or interfacial defects, leaving the functionality unconfirmed.
Authors: The observed out-of-plane bending upon thermal activation provides indirect evidence that the SMA wires retain their shape memory functionality after processing. However, we did not perform pre- or post-fabrication DSC measurements, recovery strain tests, or cyclic stability assessments in this study. We will revise the discussion to explicitly acknowledge this limitation and note that such characterizations would be valuable to fully rule out potential degradation effects from UV exposure or interfacial issues. revision: partial
- The absence of pre-/post-fabrication DSC data, recovery strain measurements, or cyclic stability tests to confirm retention of SMA martensitic transformation and recovery behavior after SLA curing and TFP integration.
Circularity Check
No circularity: purely experimental fabrication and observation study
full rationale
The paper reports an experimental workflow for fabricating SMAHCs via combined SLA and TFP, followed by direct optical characterization of out-of-plane bending in eight manufactured geometries. No derivations, first-principles models, fitted parameters, or predictions are presented; all results are stated as observations from the fabricated samples. The central claim of a viable additive manufacturing route rests on these empirical demonstrations rather than any chain that reduces outputs to inputs by construction. Self-citations, if present, are not load-bearing for any claimed derivation.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Shape memory alloys exhibit reliable contraction upon heating when properly constrained within a polymer matrix
- domain assumption UV-curable resins used in SLA maintain structural integrity when embedding textile and wire reinforcements
Reference graph
Works this paper leans on
-
[1]
D. C. Lagoudas.Shape Memory Alloys. en. Vol. 1. Boston, MA: Springer US, 2008.doi:10. 1007/978-0-387-47685-8.url:http://link.springer.com/10.1007/978-0-387-47685-8 (visited on 09/29/2020)
-
[2]
Development of a novel smart material
CA Rogers and HH Robertshaw. “Development of a novel smart material”. In:Proceedings of the 1988 winter annual meeting of the American Society of Mechanical Engineers. 1988, pp. 1–5
1988
-
[3]
Shape memory alloy reinforced composites
CA Rogers and HH Robertshaw. “Shape memory alloy reinforced composites”. In:Engineering Science Preprints25 (1988). Publisher: Society of Engineering Science, Inc., pp. 20–22
1988
-
[4]
Chapter 23 - Active hybrid structures made of shape memory alloys and fiber-reinforced composites
Max Kaiser and Martin Gurka. “Chapter 23 - Active hybrid structures made of shape memory alloys and fiber-reinforced composites”. In:Multifunctionality of Polymer Composites (Second Edition). Ed. by Ulf Breuer, Bernd Wetzel, and Martin Gurka. Second Edition. Plastics Design Library. William Andrew Publishing, 2026, pp. 851–878.isbn: 978-0-443-28872-2.doi:...
work page doi:10.1016/b978-0-443-28872-2.00026-7.url:https://www.sciencedirect 2026
-
[5]
Adaptive vortex generators based on active hybrid composites: from idea to flight test
S. Nissle et al. “Adaptive vortex generators based on active hybrid composites: from idea to flight test”. en. In:CEAS Aeronautical Journal9.4 (Dec. 2018), pp. 661–670.issn: 1869-5582, 1869-5590.doi:10.1007/s13272-018-0316-1.url:http://link.springer.com/10.1007/ s13272-018-0316-1(visited on 03/11/2021)
work page doi:10.1007/s13272-018-0316-1.url:http://link.springer.com/10.1007/ 2018
-
[6]
Aerospace applications of shape memory alloys
D J Hartl and D C Lagoudas. “Aerospace applications of shape memory alloys”. In:Pro- ceedings of the Institution of Mechanical Engineers, Part G: Journal of Aerospace Engineer- ing221.4 (Apr. 2007). Publisher: IMECHE, pp. 535–552.issn: 0954-4100.doi:10 . 1243 / 09544100JAERO211.url:https://doi.org/10.1243/09544100JAERO211(visited on 08/23/2023)
-
[7]
G Jodin et al. “Optimized design of real-scale A320 morphing high-lift flap with shape mem- ory alloys and innovative skin”. en. In:Smart Materials and Structures27.11 (Nov. 2018), p. 115005.issn: 0964-1726, 1361-665X.doi:10 . 1088 / 1361 - 665X / aae2ef.url:https : //iopscience.iop.org/article/10.1088/1361-665X/aae2ef(visited on 08/24/2021)
-
[8]
Active aerodynamic components for automotive applications - FRP spoiler with integrated SMA actuation
M. Huebler et al. “Active aerodynamic components for automotive applications - FRP spoiler with integrated SMA actuation”. In:ICCM International Conferences on Composite Materials. Vol. 2015-July. 2015.url:https://www.scopus.com/inward/record.uri?eid=2- s2.0- 85053144854&partnerID=40&md5=2a9c6e94dd1ce229f54c068449255514. 19 Submitted toSmart Mater. Struct...
2015
-
[9]
Antonio Concilio et al., eds.Shape memory alloy engineering: for aerospace, structural, and biomedical applications. eng. Second edition. Oxford Cambridge: Butterworth-Heinemann an imprint of Elsevier, 2021.isbn: 978-0-12-819264-1
2021
-
[10]
Stefano Rodin` o and Carmine Maletta. “Design considerations and applications of shape mem- ory alloy-based actuation in morphing structures: A systematic review”. en. In:Progress in Engineering Science1.4 (Dec. 2024), p. 100021.issn: 29504252.doi:10.1016/j.pes.2024. 100021.url:https : / / linkinghub . elsevier . com / retrieve / pii / S2950425224000215 (...
-
[11]
Embedded shape memory alloys confer aerodynamic profile adaptivity
J. A. Balta et al. “Embedded shape memory alloys confer aerodynamic profile adaptivity”. In:Smart Materials Bulletin2001.12 (2001), pp. 8–12.issn: 1471-3918.doi:https://doi. org/10.1016/S1471-3918(01)80094-0.url:https://www.sciencedirect.com/science/ article/pii/S1471391801800940
work page doi:10.1016/s1471-3918(01)80094-0.url:https://www.sciencedirect.com/science/ 2001
-
[12]
Woven type smart soft composite beam with in-plane shape retention
Renzhe Wu et al. “Woven type smart soft composite beam with in-plane shape retention”. en. In:Smart Materials and Structures22.12 (Dec. 2013), p. 125007.issn: 0964-1726, 1361-665X. doi:10.1088/0964-1726/22/12/125007.url:https://iopscience.iop.org/article/10. 1088/0964-1726/22/12/125007(visited on 05/18/2022)
work page doi:10.1088/0964-1726/22/12/125007.url:https://iopscience.iop.org/article/10 2013
-
[13]
Min-Woo Han et al. “Shape memory alloy/glass fiber woven composite for soft morphing winglets of unmanned aerial vehicles”. en. In:Composite Structures140 (Apr. 2016), pp. 202– 212.issn: 02638223.doi:10.1016/j.compstruct.2015.12.051.url:https://linkinghub. elsevier.com/retrieve/pii/S0263822315011411(visited on 08/16/2024)
work page doi:10.1016/j.compstruct.2015.12.051.url:https://linkinghub 2016
-
[14]
3D PRINTING TO INTEGRATE ACTUATORS INTO COMPOS- ITES
Sampada Bodkhe et al. “3D PRINTING TO INTEGRATE ACTUATORS INTO COMPOS- ITES”. en. In:Additive Manufacturing35 (Oct. 2020), p. 101290.issn: 22148604.doi:10. 1016/j.addma.2020.101290.url:https://linkinghub.elsevier.com/retrieve/pii/ S221486042030662X(visited on 10/11/2021)
-
[15]
M. Huebler et al. “Fiber-reinforced polymers with integrated shape memory alloy actuation: an innovative actuation method for aerodynamic applications”. In:CEAS Aeronautical Journal 7.4 (2016), pp. 567–576.doi:10.1007/s13272- 016- 0209- 0.url:https://www.scopus. com/inward/record.uri?eid=2- s2.0- 84991270262&doi=10.1007%2fs13272- 016- 0209- 0&partnerID=40...
-
[16]
Development and Testing of a Shape Memory Alloy-Driven Composite Morphing Radiator
P. Walgren et al. “Development and Testing of a Shape Memory Alloy-Driven Composite Morphing Radiator”. en. In:Shape Memory and Superelasticity4.1 (Mar. 2018), pp. 232– 241.issn: 2199-384X, 2199-3858.doi:10.1007/s40830- 018- 0147- 2.url:http://link. springer.com/10.1007/s40830-018-0147-2(visited on 09/08/2025)
-
[17]
Manuel Kunzler et al. “Design, construction and simulation of a shape memory alloy based morphing airfoil demonstrator based on the agonist-antagonist principle”. en. In:Active and Passive Smart Structures and Integrated Systems XVI. Ed. by Jae-Hung Han, Shima Sha- hab, and Jinkyu Yang. Fachkonferenz. Long Beach, United States: SPIE, Apr. 2022, p. 73. doi...
-
[18]
Airfoil trailing edge morphing based on modified SMAHC concept: design, implementation, and experimental studies
Max Kaiser, Martin Gurka, and Manuel Kunzler. “Airfoil trailing edge morphing based on modified SMAHC concept: design, implementation, and experimental studies”. en. In:Active and Passive Smart Structures and Integrated Systems XVI. Ed. by Jae-Hung Han, Shima Shahab, and Jinkyu Yang. Fachkonferenz. Long Beach, United States: SPIE, Apr. 2022, p. 70. url:ht...
2022
-
[19]
Design of a composite morphing wing
Wan Luqman Hakim Wan A Hamid. “Design of a composite morphing wing”. In: (May 2019). Publisher: Imperial College London.doi:10.25560/79631.url:http://spiral.imperial. ac.uk/handle/10044/1/79631(visited on 08/24/2021)
work page doi:10.25560/79631.url:http://spiral.imperial 2019
-
[20]
Wing Shape Control through an SMA-Based Device
S. Barbarino et al. “Wing Shape Control through an SMA-Based Device”. en. In:Journal of Intelligent Material Systems and Structures20.3 (Feb. 2009), pp. 283–296.issn: 1045-389X, 1530-8138.doi:10.1177/1045389X08093825.url:https://journals.sagepub.com/doi/ 10.1177/1045389X08093825(visited on 09/23/2025). 20 Submitted toSmart Mater. Struct.(2026) M Kunzleret al
work page doi:10.1177/1045389x08093825.url:https://journals.sagepub.com/doi/ 2009
-
[21]
Jean-Ren´ e Poulin et al. “Development of a morphing wing extrados made of composite ma- terials and actuated by shape memory alloys”. en. In:Journal of Intelligent Material Systems and Structures28.11 (July 2017), pp. 1437–1453.issn: 1045-389X, 1530-8138.doi:10.1177/ 1045389X16672565.url:https://journals.sagepub.com/doi/10.1177/1045389X16672565 (visited ...
-
[22]
Review on fabrication and mechanical characterization of shape memory alloy hybrid composites
Niranjan Pattar and S. Patil. “Review on fabrication and mechanical characterization of shape memory alloy hybrid composites”. In:Advanced Composites and Hybrid Materials2 (Dec. 2019).doi:10.1007/s42114-019-00119-2
-
[23]
Zhenbi Wang et al. “EXPERIMENTAL AND NUMERICAL INVESTIGATION OF 3D PRINTED ELASTOMERIC COMPOSITE WITH INTEGRATED SMA ACTUATOR”. en. In:10th EC- COMAS Thematic Conference on Smart Structures and Materials. Patras, Greece: Dept. of Mechanical Engineering & Aeronautics University of Patras, 2023, pp. 1703–1714.isbn: 978- 960-88104-6-4.doi:10.7712/150123.9941...
work page doi:10.7712/150123.9941.445054.url:https://www.eccomasproceedia 2023
-
[24]
Manufacturing, development and control of a two-way 3D printed soft actuator actuated with SMAs
Aline Iobana Acevedo-Velazquez et al. “Manufacturing, development and control of a two-way 3D printed soft actuator actuated with SMAs”. en. In:Journal of Physics: Conference Series 2716.1 (Mar. 2024), p. 012049.issn: 1742-6588, 1742-6596.doi:10.1088/1742-6596/2716/1/ 012049.url:https://iopscience.iop.org/article/10.1088/1742-6596/2716/1/012049 (visited o...
-
[25]
E T ¨Onder, B S¨ umer, and S C Ba¸ slami¸ sli. “Development of a novel two-way 3D printed flexible spiral composite actuator based on shape memory alloy wire and its control”. en. In: Smart Materials and Structures33.7 (July 2024), p. 075011.issn: 0964-1726, 1361-665X.doi: 10.1088/1361-665X/ad508c.url:https://iopscience.iop.org/article/10.1088/1361- 665X/...
work page doi:10.1088/1361-665x/ad508c.url:https://iopscience.iop.org/article/10.1088/1361- 2024
-
[26]
A Bi-State Shape Memory Material Composite Soft Actuator
Ramprasad Rajagopalan, Andrew J. Petruska, and David Howard. “A Bi-State Shape Memory Material Composite Soft Actuator”. en. In:Actuators11.3 (Mar. 2022), p. 86.issn: 2076-0825. doi:10.3390/act11030086.url:https://www.mdpi.com/2076-0825/11/3/86(visited on 05/06/2025)
work page doi:10.3390/act11030086.url:https://www.mdpi.com/2076-0825/11/3/86(visited 2022
-
[27]
3D Printed Shape Memory Alloy Wire Embedded Actuator
Md Najmul Islam et al. “3D Printed Shape Memory Alloy Wire Embedded Actuator”. en. In:2024 IEEE 17th Dallas Circuits and Systems Conference (DCAS). Richardson, TX, USA: IEEE, Apr. 2024, pp. 1–5.isbn: 9798350349535.doi:10.1109/DCAS61159.2024.10539916. url:https://ieeexplore.ieee.org/document/10539916/(visited on 05/06/2025)
-
[28]
Development of shape memory alloy-based adaptive fiber-reinforced plastics by means of open reed weaving technology
Moniruddoza Ashir and Chokri Cherif. “Development of shape memory alloy-based adaptive fiber-reinforced plastics by means of open reed weaving technology”. en. In:Journal of Rein- forced Plastics and Composites39.15-16 (Aug. 2020), pp. 563–571.issn: 0731-6844, 1530-7964. doi:10 . 1177 / 0731684420920941.url:http : / / journals . sagepub . com / doi / 10 ....
2020
-
[29]
De-coupling the Eigenmodes of SMA-reinforced Bimorph Composites using Multi-objective Optimization
Rupal Srivastava and Bishakh Bhattacharya. “De-coupling the Eigenmodes of SMA-reinforced Bimorph Composites using Multi-objective Optimization”. en. In:Journal of Vibration En- gineering & Technologies10.6 (Sept. 2022), pp. 2151–2161.issn: 2523-3920, 2523-3939.doi: 10.1007/s42417-022-00499-8.url:https://link.springer.com/10.1007/s42417-022- 00499-8(visite...
work page doi:10.1007/s42417-022-00499-8.url:https://link.springer.com/10.1007/s42417-022- 2022
-
[30]
Design and development of active bimorph structure for deployable space application
Rupal Srivastava et al. “Design and development of active bimorph structure for deployable space application”. en. In:Active and Passive Smart Structures and Integrated Systems XII. Ed. by Alper Erturk. Denver, United States: SPIE, Mar. 2018, p. 118.doi:10.1117/12.2296547. url:https://www.spiedigitallibrary.org/conference-proceedings-of-spie/10595/ 229654...
-
[31]
Martin Gurka.The physics of multifunctional materials: concepts, materials, applications. eng. OCLC: 1112606292. Lancaster, Pennsylvania: DEStech Publications, Inc., 2019.isbn: 978-1- 5231-2485-5
2019
-
[32]
Making metal surfaces strong, resistant, and multifunctional by nanoscale-sculpturing
M. Baytekin-Gerngross et al. “Making metal surfaces strong, resistant, and multifunctional by nanoscale-sculpturing”. en. In:Nanoscale Horizons1.6 (2016), pp. 467–472.issn: 2055-6756, 2055-6764.doi:10 . 1039 / C6NH00140H.url:https : / / xlink . rsc . org / ?DOI = C6NH00140H (visited on 09/11/2025). 21
2016
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.