Recognition: unknown
PANOC-lite: A simpler and more efficient algorithm for composite minimization
Pith reviewed 2026-05-10 11:23 UTC · model grok-4.3
The pith
PANOC-lite simplifies proximal-gradient acceleration for composite convex minimization by using a cheaper merit function and avoiding extra gradient evaluations during backtracking.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
PANOC-lite is a linesearch method for composite minimization that accelerates proximal-gradient steps with fast Newton-type directions using only the standard proximal-gradient oracle when the nonsmooth term is convex. It achieves a cheaper backtracking procedure that requires no extra gradient evaluations and permits an enlarged range of stepsizes. Global subsequential convergence and local superlinear convergence follow under conventional assumptions through a novel merit function that is less expensive to evaluate than alternatives such as the forward-backward envelope.
What carries the argument
A novel merit function for linesearch acceptance that is cheaper to evaluate than the forward-backward envelope and enables both the backtracking simplification and the convergence proofs.
If this is right
- The algorithm requires only the standard proximal-gradient oracle without needing extra gradient computations during backtracking.
- An enlarged range of permitted stepsizes is available compared to earlier methods.
- Global subsequential convergence and local superlinear convergence are guaranteed under the stated conventional assumptions.
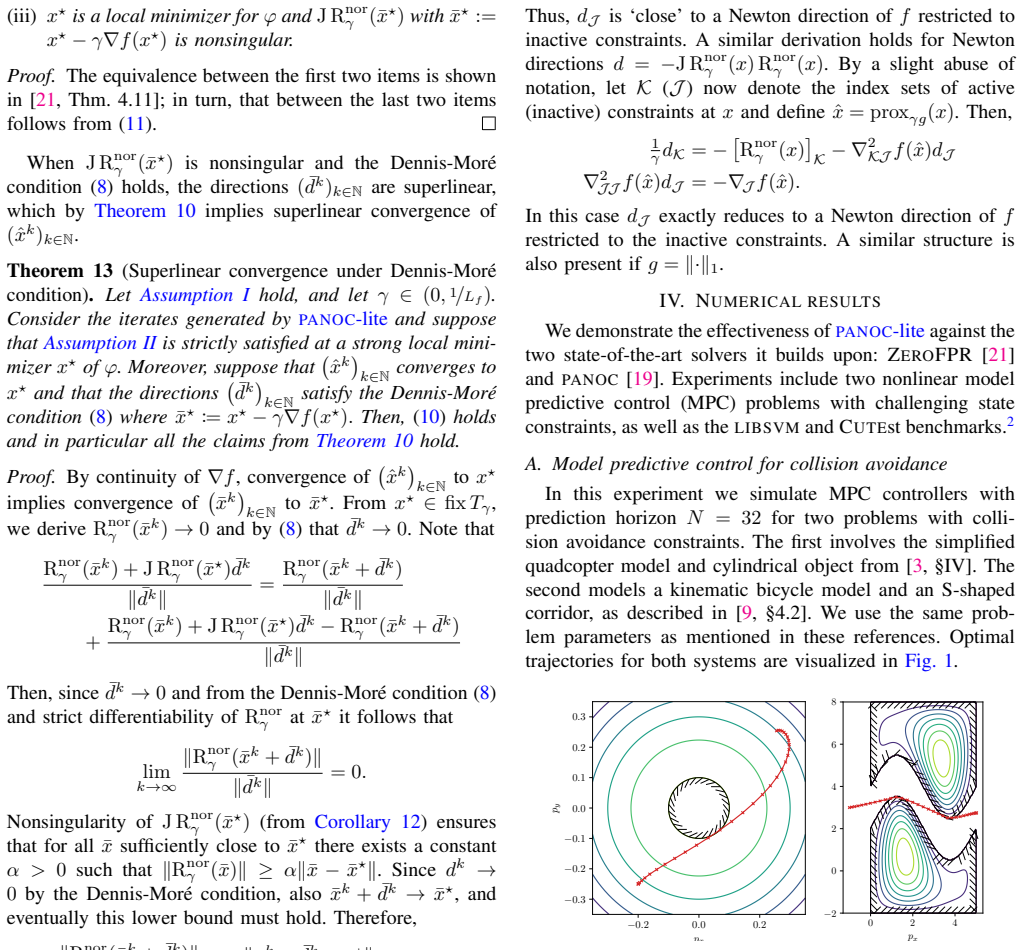
- The method applies directly to convex composite problems and was shown to work on model predictive control with collision avoidance.
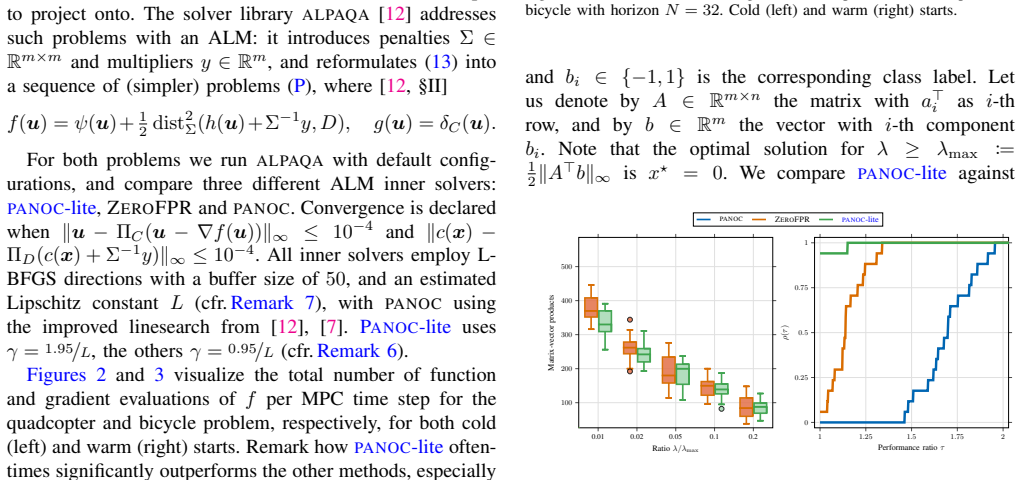
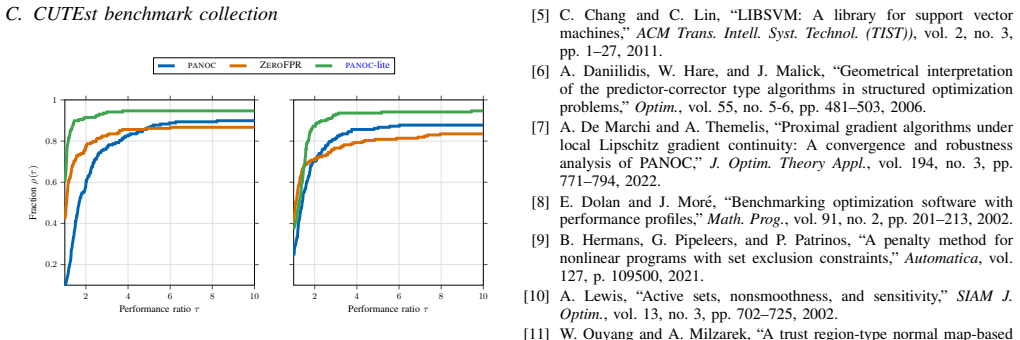
- Practical efficiency gains appear on LIBSVM and CUTEst benchmark collections.
Where Pith is reading between the lines
- The cheaper merit function and backtracking could reduce per-iteration cost enough to make Newton-accelerated first-order methods competitive on larger-scale instances than before.
- Because the validation includes real-time control problems, the approach may translate to faster solve times in embedded optimization settings.
- Similar merit-function simplifications might be explored for related first-order schemes that currently rely on more expensive envelopes.
- If the local superlinear rate holds in practice, it could close the gap between first-order and second-order methods for moderately smooth composite problems.
Load-bearing premise
The nonsmooth term in the composite objective must be convex and the problem must satisfy the conventional assumptions required for the proximal-gradient oracle and the convergence analysis to hold.
What would settle it
A convex composite problem on which PANOC-lite fails to produce global subsequential convergence or exhibits only linear (rather than superlinear) local convergence, despite the proximal-gradient oracle being available and the merit function being used as described.
Figures


read the original abstract
This work introduces a simple and efficient linesearch method for composite minimization that accelerates proximal-gradient iterations with fast Newton-type directions. Our algorithm is based on simple operations and only requires the standard proximal-gradient oracle, similar to PANOC and ZeroFPR, provided that the nonsmooth term is convex. Noteworthy improvements include a cheaper backtracking procedure, in the sense that no additional gradients need to be evaluated, and an enlarged range of permitted stepsizes. Global subsequential convergence and local superlinear convergence are established under conventional assumptions by considering a novel merit function which is less expensive to evaluate than alternatives like the forward-backward envelope. Finally, the proposed approach is validated on model predictive control problems with collision avoidance constraints, as well as on the LIBSVM and CUTEst benchmarks.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces PANOC-lite, a linesearch algorithm for composite minimization problems min f(x) + g(x) with f smooth and g convex nonsmooth. It accelerates proximal-gradient steps with Newton-type directions using only the standard proximal-gradient oracle. Improvements include a backtracking procedure requiring no extra gradient evaluations and an enlarged stepsize range. Global subsequential convergence and local superlinear convergence are proved under standard assumptions via a novel merit function cheaper to evaluate than the forward-backward envelope. The method is tested on model predictive control problems with collision avoidance and on LIBSVM/CUTEst benchmarks.
Significance. If the claimed convergence properties hold with the novel merit function, the work provides a simpler, computationally lighter alternative to PANOC and ZeroFPR for composite problems with convex nonsmooth terms. The reduced cost in backtracking and the merit function could improve practical performance in applications like MPC. Credit is due for the parameter-free aspects of the oracle and the empirical validation on relevant benchmarks.
major comments (1)
- [§4] §4 (Convergence analysis), around the definition of the novel merit function: the central claim of global subsequential convergence to stationary points of the original composite objective requires that critical points of the merit function coincide exactly with fixed points of the proximal-gradient operator (i.e., 0 ∈ ∇f(x) + ∂g(x)). The manuscript must include an explicit lemma establishing this equivalence; without it, subsequential convergence applies only to the surrogate and does not transfer to the intended problem.
minor comments (3)
- [Abstract] Abstract: the statement that the backtracking is 'cheaper' in the sense of no additional gradients should be accompanied by a brief complexity comparison to PANOC/ZeroFPR.
- [§5] §5 (Numerical experiments): the MPC and benchmark results would be strengthened by reporting iteration counts or CPU times alongside function evaluations to quantify the claimed efficiency gains.
- Notation: the definition of the novel merit function should be cross-referenced to the forward-backward envelope for direct comparison of evaluation cost.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive feedback on our manuscript. We address the major comment below.
read point-by-point responses
-
Referee: [§4] §4 (Convergence analysis), around the definition of the novel merit function: the central claim of global subsequential convergence to stationary points of the original composite objective requires that critical points of the merit function coincide exactly with fixed points of the proximal-gradient operator (i.e., 0 ∈ ∇f(x) + ∂g(x)). The manuscript must include an explicit lemma establishing this equivalence; without it, subsequential convergence applies only to the surrogate and does not transfer to the intended problem.
Authors: We agree that an explicit statement of the equivalence is needed for full rigor. The novel merit function is constructed precisely so that its critical points coincide with the fixed points of the proximal-gradient operator (i.e., the stationary points of the original composite objective). We will insert a short, self-contained lemma (new Lemma 4.1) immediately after the merit-function definition that proves both directions of the equivalence under the standing assumptions (f continuously differentiable with Lipschitz gradient, g convex and proper). The proof is direct from the subdifferential characterization and the definition of the merit function; it does not rely on any additional hypotheses. All subsequent global-convergence statements will then cite this lemma explicitly, thereby transferring subsequential convergence to the original problem. This addition will be made in the revised manuscript. revision: yes
Circularity Check
No significant circularity; derivation relies on independent merit function construction
full rationale
The paper introduces PANOC-lite with a novel merit function positioned as cheaper to evaluate than the forward-backward envelope, establishing global subsequential and local superlinear convergence under standard assumptions for convex nonsmooth terms. No equations or claims reduce by construction to fitted inputs, self-definitions, or load-bearing self-citations; the merit function is presented as a new construction whose properties are analyzed directly rather than assumed equivalent via prior author work. Self-references to PANOC/ZeroFPR are contextual for oracle similarity but do not carry the central convergence proof. The derivation chain remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The nonsmooth term is convex
- domain assumption Conventional assumptions hold
Reference graph
Works this paper leans on
-
[1]
A fast iterative shrinkage-thresholding algorithm for linear inverse problems,
A. Beck and M. Teboulle, “A fast iterative shrinkage-thresholding algorithm for linear inverse problems,” SIAM J. Imaging Sci. , vol. 2, no. 1, pp. 183–202, 2009
2009
- [2]
-
[3]
PANTR: A proximal algorithm with trust-region updates for nonconvex constrained optimization,
A. Bodard, P. Pas, and P. Patrinos, “PANTR: A proximal algorithm with trust-region updates for nonconvex constrained optimization,” IEEE Control Syst. Lett. , vol. 7, pp. 2389–2394, 2023
2023
-
[4]
Proximal alternating linearized minimization for nonconvex and nonsmooth problems,
J. Bolte, S. Sabach, and M. Teboulle, “Proximal alternating linearized minimization for nonconvex and nonsmooth problems,” Math. Prog., vol. 146, no. 1, pp. 459–494, 2014
2014
-
[5]
LIBSVM: A library for support vector machines,
C. Chang and C. Lin, “LIBSVM: A library for support vector machines,” ACM Trans. Intell. Syst. Technol. (TIST)) , vol. 2, no. 3, pp. 1–27, 2011
2011
-
[6]
Geometrical interpretation of the predictor-corrector type algorithms in structured optimization problems,
A. Daniilidis, W. Hare, and J. Malick, “Geometrical interpretation of the predictor-corrector type algorithms in structured optimization problems,” Optim., vol. 55, no. 5-6, pp. 481–503, 2006
2006
-
[7]
Proximal gradient algorithms under local Lipschitz gradient continuity: A convergence and robustness analysis of PANOC,
A. De Marchi and A. Themelis, “Proximal gradient algorithms under local Lipschitz gradient continuity: A convergence and robustness analysis of PANOC,” J. Optim. Theory Appl. , vol. 194, no. 3, pp. 771–794, 2022
2022
-
[8]
Benchmarking optimization software with performance profiles,
E. Dolan and J. Mor ´e, “Benchmarking optimization software with performance profiles,” Math. Prog., vol. 91, no. 2, pp. 201–213, 2002
2002
-
[9]
A penalty method for nonlinear programs with set exclusion constraints,
B. Hermans, G. Pipeleers, and P. Patrinos, “A penalty method for nonlinear programs with set exclusion constraints,” Automatica, vol. 127, p. 109500, 2021
2021
-
[10]
Active sets, nonsmoothness, and sensitivity,
A. Lewis, “Active sets, nonsmoothness, and sensitivity,” SIAM J. Optim., vol. 13, no. 3, pp. 702–725, 2002
2002
-
[11]
A trust region-type normal map-based semismooth Newton method for nonsmooth nonconvex composite optimization,
W. Ouyang and A. Milzarek, “A trust region-type normal map-based semismooth Newton method for nonsmooth nonconvex composite optimization,” Math. Prog., vol. 212, no. 1, pp. 389–435, 2025
2025
-
[12]
Alpaqa: A matrix-free solver for nonlinear MPC and large-scale nonconvex optimization,
P. Pas, M. Schuurmans, and P. Patrinos, “Alpaqa: A matrix-free solver for nonlinear MPC and large-scale nonconvex optimization,” in 2022 Eur. Control Conf. (ECC)) , 2022, pp. 417–422
2022
-
[13]
Proximal Newton methods for convex composite optimization,
P. Patrinos and A. Bemporad, “Proximal Newton methods for convex composite optimization,” in 52nd IEEE Conf. Decis. Control , 2013, pp. 2358–2363
2013
-
[14]
Generalized Hessian properties of regularized nonsmooth functions,
R. Poliquin and R. Rockafellar, “Generalized Hessian properties of regularized nonsmooth functions,” SIAM J. Optim. , vol. 6, no. 4, pp. 1121–1137, 1996
1996
-
[15]
Rawlings, D
J. Rawlings, D. Mayne, and M. Diehl, Model predictive control: theory, computation, and design . Nob Hill Publishing, 2017
2017
-
[16]
Normal maps induced by linear transformations,
S. Robinson, “Normal maps induced by linear transformations,” Math. Oper. Res., vol. 17, no. 3, pp. 691–714, 1992
1992
-
[17]
Rockafellar and R
R. Rockafellar and R. Wets, Variational Analysis. Springer, 1998
1998
-
[18]
OpEn: Code generation for embedded nonconvex optimization,
P. Sopasakis, E. Fresk, and P. Patrinos, “OpEn: Code generation for embedded nonconvex optimization,” IFAC-PapersOnLine, vol. 53, no. 2, pp. 6548–6554, 2020
2020
-
[19]
Forward–backward quasi- Newton methods for nonsmooth optimization problems,
L. Stella, A. Themelis, and P. Patrinos, “Forward–backward quasi- Newton methods for nonsmooth optimization problems,” Comput. Optim. Appl., vol. 67, no. 3, pp. 443–487, 2017
2017
-
[20]
A simple and efficient algorithm for nonlinear model predictive control,
L. Stella, A. Themelis, P. Sopasakis, and P. Patrinos, “A simple and efficient algorithm for nonlinear model predictive control,” in 2017 IEEE 56th Annual Conf. Decis. Control (CDC)), 2017, pp. 1939–1944
2017
-
[21]
Forward-backward envelope for the sum of two nonconvex functions: Further properties and nonmonotone linesearch algorithms,
A. Themelis, L. Stella, and P. Patrinos, “Forward-backward envelope for the sum of two nonconvex functions: Further properties and nonmonotone linesearch algorithms,” SIAM J. Optim. , vol. 28, no. 3, pp. 2274–2303, 2018
2018
-
[22]
A linesearch-type normal map-based semismooth Newton method for nonsmooth nonconvex composite optimization,
H. Zeng, W. Ouyang, and A. Milzarek, “A linesearch-type normal map-based semismooth Newton method for nonsmooth nonconvex composite optimization,” Comput. Optim. Appl. , pp. 1–38, 2026. APPENDIX Lemma A.1. Suppose that Assumption I holds and let x⋆ be a fixed point of proxγg(id − γ∇f) for some γ > 0. Then, for any x ∈ Rn it holds that ψγ(x) ≤ φ(x⋆)+ 1+γLf...
2026
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.