Recognition: unknown
One-shot learning for the complex dynamical behaviors of weakly nonlinear forced oscillators
Pith reviewed 2026-05-10 11:11 UTC · model grok-4.3
The pith
A model trained on one excitation time history predicts softening, hardening and jump phenomena across wide excitation ranges in weakly nonlinear oscillators.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
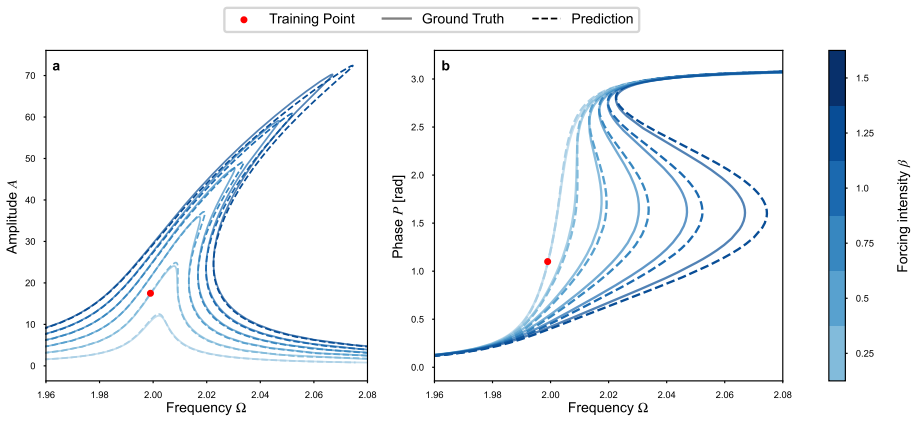
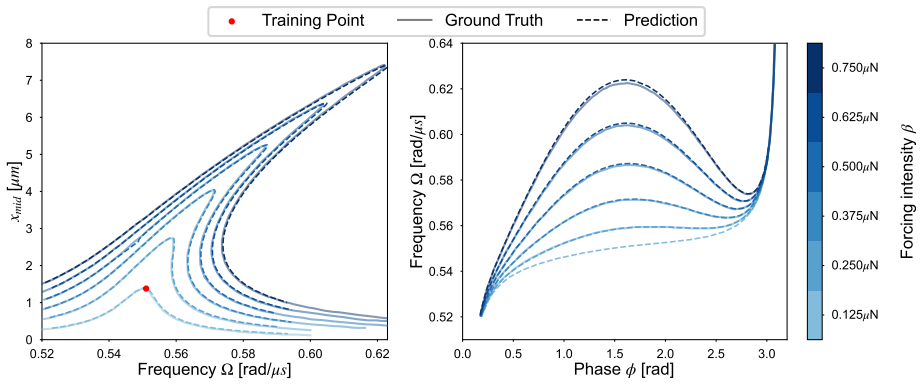
By decomposing the forced response of a weakly nonlinear oscillator into slow-varying amplitude and phase equations via the Generalized Harmonic Balance method and then applying evolutionary sparse identification to those equations, the complete nonlinear model can be recovered from a single forced time history. The recovered model then reproduces the full frequency-response curve, including amplitude-dependent frequency shifts and jump discontinuities, for excitation levels different from the training point.
What carries the argument
MEv-SINDy, which performs sparse regression on the slow-varying differential equations obtained by applying the Generalized Harmonic Balance decomposition to the multi-frequency forced response.
If this is right
- Softening and hardening nonlinearities are predicted accurately from training at one excitation strength.
- Jump phenomena appear correctly in the extrapolated frequency-response curves without additional training data.
- Only a single excitation test is needed to characterize the global dynamics of the tested MEMS resonators and micromirrors.
- Data acquisition effort for nonlinear microsystem design drops from repeated sweeps to one trajectory.
Where Pith is reading between the lines
- The same decomposition-plus-sparse-regression pipeline could be applied to other weakly nonlinear systems such as Duffing or van der Pol oscillators under external forcing.
- Embedding the method in an online experiment loop might allow continuous refinement of the model while the device operates.
- Including additional harmonics in the balance step could extend the range to moderately nonlinear regimes while preserving the one-shot property.
Load-bearing premise
The response must remain weakly nonlinear so that the Generalized Harmonic Balance decomposition into a small set of slow-varying equations stays accurate when the training data come from only one excitation level.
What would settle it
Experimental frequency-response measurements at an excitation amplitude far from the single training level that show a jump location or peak amplitude differing markedly from the model's prediction would refute the extrapolation claim.
Figures














read the original abstract
Extrapolative prediction of complex nonlinear dynamics remains a central challenge in engineering. This study proposes a one-shot learning method to identify global frequency-response curves from a single excitation time history by learning governing equations. We introduce MEv-SINDy (Multi-frequency Evolutionary Sparse Identification of Nonlinear Dynamics) to infer the governing equations of non-autonomous and multi-frequency systems. The methodology leverages the Generalized Harmonic Balance (GHB) method to decompose complex forced responses into a set of slow-varying evolution equations. We validated the capabilities of MEv-SINDy on two critical Micro-Electro-Mechanical Systems (MEMS). These applications include a nonlinear beam resonator and a MEMS micromirror. Our results show that the model trained on a single point accurately predicts softening/hardening effects and jump phenomena across a wide range of excitation levels. This approach significantly reduces the data acquisition burden for the characterization and design of nonlinear microsystems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces MEv-SINDy, an evolutionary sparse regression method that augments SINDy with multi-frequency handling and integrates it with the Generalized Harmonic Balance (GHB) decomposition to obtain slow-varying amplitude/phase evolution equations from a single forced time history. It claims that the resulting model, trained at one excitation level, extrapolates to predict the full nonlinear frequency-response curve—including softening/hardening behavior and jump phenomena—across wide ranges of excitation for a nonlinear beam resonator and a MEMS micromirror.
Significance. If the extrapolation holds with verifiable accuracy, the approach would materially reduce the experimental burden of mapping nonlinear frequency responses in microsystems, replacing dense frequency sweeps with a single trajectory measurement. The combination of GHB with evolutionary sparsity is a plausible route to data-efficient modeling of weakly nonlinear forced oscillators.
major comments (3)
- [Abstract] Abstract: the central claim that 'the model trained on a single point accurately predicts softening/hardening effects and jump phenomena across a wide range of excitation levels' is presented without any quantitative error metrics (RMSE, relative error on jump locations, or backbone-curve deviation), cross-validation protocol, or explicit statement of the training amplitude relative to the onset of nonlinearity. This leaves the extrapolation performance unsupported by visible evidence.
- [Validation sections] Validation sections (beam resonator and micromirror): the manuscript does not demonstrate that the GHB first-harmonic truncation remains accurate once response amplitude increases into the jump regime, nor does it report residual higher-harmonic content or amplitude-dependent coefficient drift. Without such checks, the assumption that the identified slow equations remain valid far outside the training trajectory is untested.
- [MEv-SINDy algorithm description] MEv-SINDy algorithm description: it is not shown whether the evolutionary term selection or any scaling parameters in the library are constrained so that the recovered coefficients are independent of the single training trajectory; if the sparsity threshold or library terms are tuned post-hoc to the training data, the reported predictions risk being circular rather than genuinely extrapolative.
minor comments (2)
- [Abstract] The abstract introduces the acronym MEv-SINDy with its expansion, but the subsequent text should consistently use the expanded form on first use in each major section for clarity.
- [Results figures] Figure captions for the MEMS results should explicitly state the excitation amplitude used for training versus the range of predictions shown, to allow immediate visual assessment of the extrapolation distance.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which highlight important aspects of clarity and validation. We address each major comment below and will incorporate revisions to strengthen the presentation of results and methods.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claim that 'the model trained on a single point accurately predicts softening/hardening effects and jump phenomena across a wide range of excitation levels' is presented without any quantitative error metrics (RMSE, relative error on jump locations, or backbone-curve deviation), cross-validation protocol, or explicit statement of the training amplitude relative to the onset of nonlinearity. This leaves the extrapolation performance unsupported by visible evidence.
Authors: We agree that quantitative support strengthens the abstract. In the revised manuscript we will add explicit RMSE values for the predicted frequency-response curves, relative errors on jump locations, a statement of the training amplitude relative to nonlinearity onset, and a brief description of the cross-validation protocol employed. revision: yes
-
Referee: [Validation sections] Validation sections (beam resonator and micromirror): the manuscript does not demonstrate that the GHB first-harmonic truncation remains accurate once response amplitude increases into the jump regime, nor does it report residual higher-harmonic content or amplitude-dependent coefficient drift. Without such checks, the assumption that the identified slow equations remain valid far outside the training trajectory is untested.
Authors: We acknowledge the need for explicit validation of the GHB truncation. The revised validation sections will include quantitative checks on first-harmonic accuracy in the jump regime, reported residual higher-harmonic content extracted from the original time histories, and an assessment of amplitude-dependent drift in the identified coefficients to confirm validity of the slow equations outside the training trajectory. revision: yes
-
Referee: [MEv-SINDy algorithm description] MEv-SINDy algorithm description: it is not shown whether the evolutionary term selection or any scaling parameters in the library are constrained so that the recovered coefficients are independent of the single training trajectory; if the sparsity threshold or library terms are tuned post-hoc to the training data, the reported predictions risk being circular rather than genuinely extrapolative.
Authors: The MEv-SINDy implementation uses a fixed candidate library and evolutionary selection with sparsity thresholds set a priori according to the method's design criteria, independent of any specific training trajectory. In the revised algorithm description we will explicitly document these fixed parameters and include supplementary analysis showing that the recovered coefficients remain stable across different single-trajectory choices, thereby confirming the extrapolative nature of the predictions. revision: yes
Circularity Check
No significant circularity; derivation is self-contained data-driven identification plus standard extrapolation
full rationale
The paper introduces MEv-SINDy as a sparse regression procedure that identifies coefficients in GHB-derived slow equations from a single measured time history. Subsequent predictions at new excitation amplitudes are obtained by numerically integrating those fixed-coefficient equations under different forcing terms. This is ordinary forward simulation of an identified model and does not reduce to the training data by construction, nor does it rely on self-citations, uniqueness theorems imported from prior author work, or renaming of known results. The weak-nonlinearity assumption and library completeness are explicit methodological premises, not hidden definitional loops. No load-bearing step equates a fitted quantity to its own prediction.
Axiom & Free-Parameter Ledger
free parameters (1)
- Sparsity threshold and library terms
axioms (1)
- domain assumption The forced response admits a decomposition via Generalized Harmonic Balance into a set of slow-varying evolution equations
invented entities (1)
-
MEv-SINDy algorithm
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Model neurons: from hodgkin-huxley to hopfield, in: StatisticalMechanicsofNeuralNetworks: ProceedingsoftheXlthSitgesConferenceSitges, Barcelona, Spain, 3–7 June 1990, Springer. pp. 5–18. 42 Amsallem, D., Zahr, M.J., Farhat, C.,
1990
-
[2]
IEEE Transactions on Pattern Analysis and Machine Intelligence 28, 594–611
One-shot learning of object categories. IEEE Transactions on Pattern Analysis and Machine Intelligence 28, 594–611. doi:10.1109/ TPAMI.2006.79. Franco, N., Manzoni, A., Zunino, P.,
2006
- [3]
-
[4]
Physics-based polynomial neural networks for one-shot learning of dynamical systems from one or a few samples. ArXiv abs/2005.11699. URL:https://api.semanticscholar.org/CorpusID:218870280. Jiao, A., He, H., Ranade, R., et al.,
-
[5]
1038/s41467-025-63076-z, doi:10.1038/s41467-025-63076-z
URL:https://doi.org/10. 1038/s41467-025-63076-z, doi:10.1038/s41467-025-63076-z. Krack, M., Gross, J.,
-
[6]
Encoding cumula- tion to learn perturbative nonlinear oscillatory dynamics. Advanced Science n/a, e19707. doi:https://doi.org/10.1002/advs.202519707. Maday, Y., Rønquist, E.M.,
-
[7]
Autoencoder and its various variants, in: 2018 IEEE international conference on systems, man, and cybernetics (SMC), IEEE. pp. 415–
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.