Factor Graph-Based Shape Estimation for Continuum Robots via Magnus Expansion
Pith reviewed 2026-05-10 08:46 UTC · model grok-4.3
The pith
Estimating the shape of continuum robots from sparse sensors is possible with a compact state vector by using a Magnus-expanded Geometric Variable Strain model inside factor graphs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors derive a novel kinematic factor from the Magnus expansion of the strain field that encodes the closed-form rod geometry as a prior constraint. This factor links the coefficients of the low-dimensional Geometric Variable Strain parameterization directly to the backbone pose variables inside the factor graph. The resulting formulation produces a compact state vector that supports model-based control without sacrificing the ability to perform probabilistic inference or to add new measurement factors modularly.
What carries the argument
The Magnus-expansion-derived kinematic factor, which supplies a closed-form mapping from Geometric Variable Strain coefficients to backbone pose and serves as the prior constraint in the factor graph.
If this is right
- Produces a state vector whose dimension does not grow with spatial discretization, making it suitable for real-time model-based control.
- Preserves full probabilistic uncertainty quantification over the estimated shape.
- Maintains the ability to incorporate arbitrary sensor modalities through additional factors.
- Delivers mean position errors below 2 mm and substantially lower orientation errors than Gaussian process regression under position-only sensing.
Where Pith is reading between the lines
- This formulation could be integrated into existing factor-graph SLAM pipelines for continuum robots operating in unstructured environments.
- Extending the GVS parameterization to include dynamic effects might allow simultaneous shape and force estimation.
- The closed-form prior may reduce the need for dense sensor placement in long continuum arms.
Load-bearing premise
The low-dimensional Geometric Variable Strain parameterization together with the Magnus expansion supplies an accurate closed-form prior that correctly relates strain coefficients to backbone pose for the tendon-driven continuum robot.
What would settle it
If hardware experiments on the same tendon-driven robot show position errors consistently above 2 mm or fail to reduce orientation error by a factor of six relative to Gaussian process regression when only position measurements are used, the accuracy claims would be falsified.
Figures






read the original abstract
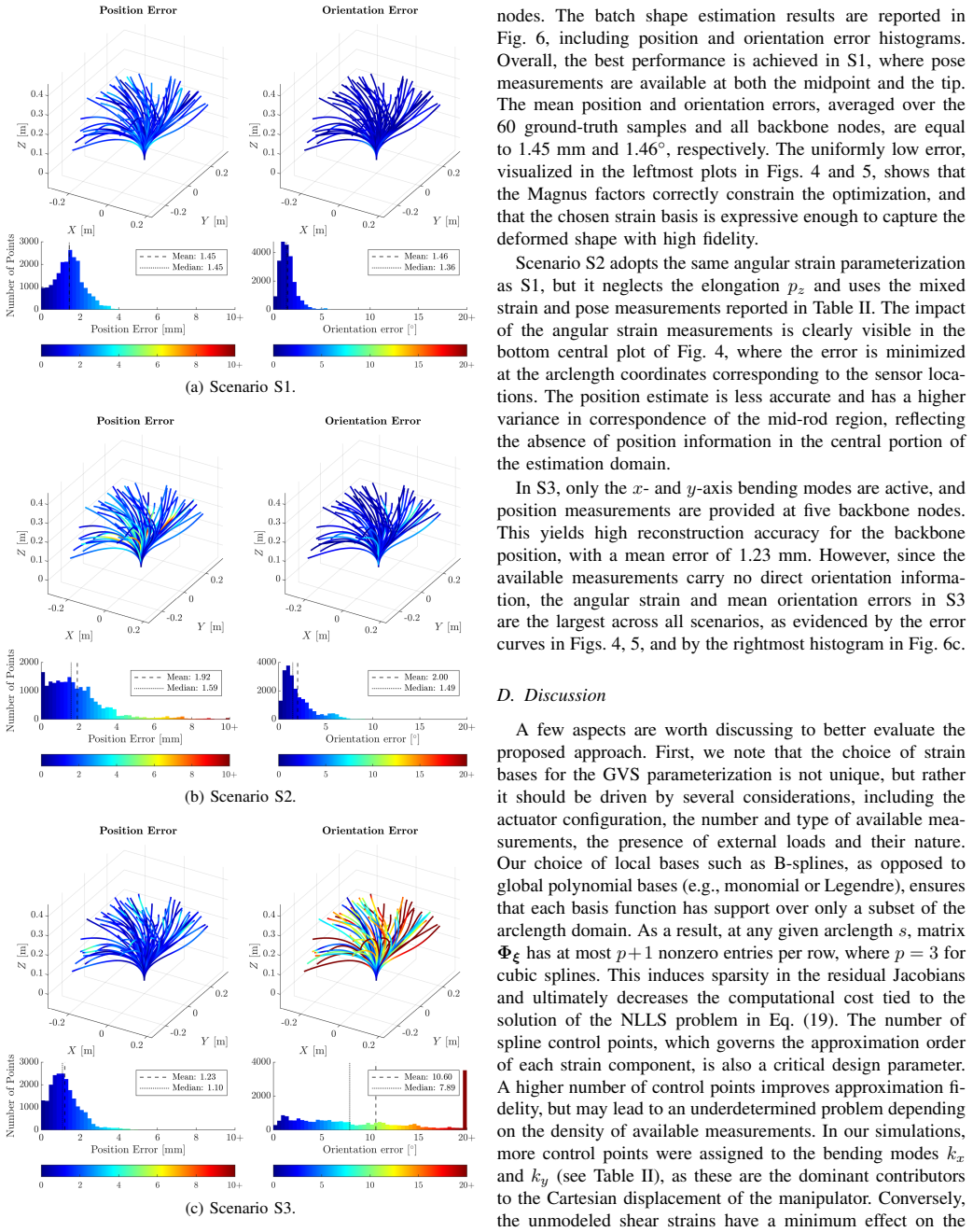
Reconstructing the shape of continuum manipulators from sparse, noisy sensor data is a challenging task, owing to the infinite-dimensional nature of such systems. Existing approaches broadly trade off between parametric methods that yield compact state representations but lack probabilistic structure, and Cosserat rod inference on factor graphs, which provides principled uncertainty quantification at the cost of a state dimension that grows with the spatial discretization. This letter combines the strength of both paradigms by estimating the coefficients of a low-dimensional Geometric Variable Strain (GVS) parameterization within a factor graph framework. A novel kinematic factor, derived from the Magnus expansion of the strain field, encodes the closed-form rod geometry as a prior constraint linking the GVS strain coefficients to the backbone pose variables. The resulting formulation yields a compact state vector directly amenable to model-based control, while retaining the modularity, probabilistic treatment and computational efficiency of factor graph inference. The proposed method is evaluated in simulation on a 0.4 m long tendon-driven continuum robot under three measurement configurations, achieving mean position errors below 2 mm for all three scenarios and demonstrating a sixfold reduction in orientation error compared to a Gaussian process regression baseline when only position measurements are available.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes estimating the shape of continuum robots by recovering coefficients of a low-dimensional Geometric Variable Strain (GVS) parameterization inside a factor-graph inference framework. A novel kinematic factor is constructed via the Magnus expansion of the strain field to supply a closed-form prior that links the GVS coefficients directly to backbone pose variables. The resulting compact state is claimed to be suitable for model-based control while preserving the modularity and uncertainty quantification of factor graphs. Simulation experiments on a 0.4 m tendon-driven robot under three sensor configurations report mean position errors below 2 mm and a sixfold orientation-error reduction relative to a Gaussian-process baseline when only position measurements are available.
Significance. If the Magnus-derived prior is sufficiently accurate, the approach successfully merges the compactness of parametric models with the probabilistic structure of factor-graph methods, producing a low-dimensional state directly usable for control. The concrete error metrics reported in simulation constitute a clear strength and provide initial evidence of practical utility. The absence of quantified truncation error, however, leaves open whether the reported accuracy generalizes beyond the specific test cases.
major comments (2)
- [Kinematic factor derivation (Section III)] The central kinematic factor is obtained by truncating the Magnus series for a spatially varying GVS strain field, yet the manuscript neither states the truncation order employed nor supplies remainder bounds or a comparison of the factor residual against high-order numerical integration of the underlying Lie-group ODE. Because the claimed accuracy (<2 mm) and the assertion of an “accurate closed-form prior” rest on this approximation, the lack of such quantification is load-bearing for the main result.
- [Experimental evaluation (Section V)] Table I and the associated simulation results report position and orientation errors without an ablation on Magnus truncation order or a direct residual comparison to a high-fidelity Cosserat integration baseline. Consequently it is impossible to determine whether the observed performance stems from the fidelity of the proposed prior or from other modeling choices.
minor comments (2)
- [Abstract] The abstract states “closed-form rod geometry” while the body acknowledges a truncated series; a brief clarifying sentence in the abstract would avoid reader confusion.
- [Results tables] Error bars or standard deviations are not reported alongside the mean errors in the simulation tables; adding them would strengthen the quantitative claims.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major comment below and outline the revisions we will make to strengthen the manuscript.
read point-by-point responses
-
Referee: [Kinematic factor derivation (Section III)] The central kinematic factor is obtained by truncating the Magnus series for a spatially varying GVS strain field, yet the manuscript neither states the truncation order employed nor supplies remainder bounds or a comparison of the factor residual against high-order numerical integration of the underlying Lie-group ODE. Because the claimed accuracy (<2 mm) and the assertion of an “accurate closed-form prior” rest on this approximation, the lack of such quantification is load-bearing for the main result.
Authors: We agree that the truncation order and associated error analysis should have been stated explicitly. The derivation in Section III employs a second-order truncation of the Magnus expansion, which was selected for its favorable accuracy-to-complexity trade-off on the strain fields arising in our tendon-driven robot. In the revised manuscript we will (i) state the truncation order at the beginning of Section III, (ii) supply the analytic remainder bound derived from the Magnus series for Lie-group-valued functions, and (iii) add a short comparison of the factor residual against a high-order numerical integrator of the underlying Lie-group ODE for the same strain profiles used in the experiments. These additions will appear in the main text and in a new supplementary section. revision: yes
-
Referee: [Experimental evaluation (Section V)] Table I and the associated simulation results report position and orientation errors without an ablation on Magnus truncation order or a direct residual comparison to a high-fidelity Cosserat integration baseline. Consequently it is impossible to determine whether the observed performance stems from the fidelity of the proposed prior or from other modeling choices.
Authors: We acknowledge that the current experimental section does not isolate the contribution of the Magnus approximation. In the revised manuscript we will augment Section V with (i) an ablation table that reports estimation errors for Magnus truncations of orders 1–4 under the three sensor configurations, and (ii) a direct residual comparison between the proposed kinematic factor and a high-fidelity Cosserat-rod numerical integration for the same robot trajectories. These results will be presented alongside the existing Table I to clarify the source of the reported accuracy. revision: yes
Circularity Check
No circularity: derivation applies established Magnus expansion and GVS from prior literature to construct an independent kinematic factor
full rationale
The paper's central derivation constructs a novel kinematic factor by applying the Magnus expansion to the low-dimensional Geometric Variable Strain (GVS) parameterization of the strain field, then embeds this as a prior constraint within a standard factor-graph inference framework. Both the GVS parameterization and the Magnus expansion are drawn from external prior literature rather than defined or fitted within the present work; the resulting state vector and MAP estimation follow directly from the factor-graph formulation without reducing to self-definition, renamed fits, or load-bearing self-citations. Simulation evaluation on a tendon-driven robot reports empirical errors but does not rely on any parameter that is fitted to the target result and then presented as a prediction. The derivation chain is therefore self-contained against external mathematical tools and benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The strain field of the continuum robot can be accurately represented by a low-dimensional set of Geometric Variable Strain coefficients.
- domain assumption The Magnus expansion yields a closed-form expression relating the integrated strain to the backbone pose.
Reference graph
Works this paper leans on
-
[1]
Biomedical applications of soft robotics,
M. Cianchetti, C. Laschi, A. Menciassi, and P. Dario, “Biomedical applications of soft robotics,”Nature Reviews Materials, vol. 3, no. 6, pp. 143–153, Jun. 2018
work page 2018
-
[2]
A berry picking robot with a hybrid soft-rigid arm: Design and task space control,
N. Uppalapati, B. Walt, A. Havens, A. Mahdian, G. Chowdhary, and G. Krishnan, “A berry picking robot with a hybrid soft-rigid arm: Design and task space control,” inRobotics, ser. Robotics: Science and Systems. United States: Massachusetts Institute of Technology, 2020
work page 2020
-
[3]
Modeling and control of a hybrid soft–rigid space manipulator system,
L. Ticozzi, P. A. Vela, and P. Tsiotras, “Modeling and control of a hybrid soft–rigid space manipulator system,”Journal of Guidance, Control, and Dynamics, vol. 48, no. 10, pp. 2162–2179, 2025
work page 2025
-
[4]
A survey on soft robot adaptability: Implementations, applications, and prospects [survey],
Z. Chen, D. Wu, Q. Guan, D. Hardman, F. Renda, J. Hughes, T. G. Thuruthel, C. D. Santina, B. Mazzolai, H. Zhao, and C. Stefanini, “A survey on soft robot adaptability: Implementations, applications, and prospects [survey],”IEEE Robotics & Automation Magazine, pp. 2–14, 2025
work page 2025
-
[5]
Learning closed loop kinematic controllers for continuum manipulators in unstructured environments,
T. G. Thuruthel, E. Falotico, M. Manti, A. Pratesi, M. Cianchetti, and C. Laschi, “Learning closed loop kinematic controllers for continuum manipulators in unstructured environments,”Soft Robotics, vol. 4, no. 3, pp. 285–296, 2017
work page 2017
-
[6]
Open loop position control of soft continuum arm using deep rein- forcement learning,
S. Satheeshbabu, N. K. Uppalapati, G. Chowdhary, and G. Krishnan, “Open loop position control of soft continuum arm using deep rein- forcement learning,” in2019 International Conference on Robotics and Automation (ICRA), 2019, pp. 5133–5139
work page 2019
-
[7]
A. T. Mathew, D. Feliu-Talegon, A. Y . Alkayas, F. Boyer, and F. Renda, “Reduced order modeling of hybrid soft-rigid robots using global, local, and state-dependent strain parameterization,”The International Journal of Robotics Research, vol. 44, no. 1, pp. 129–154, 2025
work page 2025
-
[8]
F. Renda, V . Cacucciolo, J. Dias, and L. Seneviratne, “Discrete Cosserat approach for soft robot dynamics: A new piece-wise constant strain model with torsion and shears,” in2016 IEEE/RSJ International Con- ference on Intelligent Robots and Systems (IROS), 2016, pp. 5495–5502
work page 2016
-
[9]
Sensing soft robots’ shape with cameras: an investigation on kinematics-aware SLAM,
E. R. Rosi, M. St ¨olzle, F. Solari, and C. D. Santina, “Sensing soft robots’ shape with cameras: an investigation on kinematics-aware SLAM,” in 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), 2022, pp. 795–801
work page 2022
-
[10]
Design and kinematic modeling of constant curvature continuum robots: A review,
R. J. WebsterIII and B. A. Jones, “Design and kinematic modeling of constant curvature continuum robots: A review,”The International Journal of Robotics Research, vol. 29, no. 13, pp. 1661–1683, 2010
work page 2010
-
[11]
Soft robot shape estimation with IMUs leveraging PCC kinematics for drift filtering,
F. Stella, C. D. Santina, and J. Hughes, “Soft robot shape estimation with IMUs leveraging PCC kinematics for drift filtering,”IEEE Robotics and Automation Letters, vol. 9, no. 2, pp. 1945–1952, 2024
work page 1945
-
[12]
J. Y . Loo, C. P. Tan, and S. G. Nurzaman, “H-infinity based extended Kalman filter for state estimation in highly non-linear soft robotic system,” in2019 American Control Conference (ACC), 2019, pp. 5154– 5160
work page 2019
-
[13]
Dynamic shape estimation of tendon-driven soft manipulators via actuation readings,
D. Feliu-Talegon, A. T. Mathew, A. Y . Alkayas, Y . A. Adamu, and F. Renda, “Dynamic shape estimation of tendon-driven soft manipulators via actuation readings,”IEEE Robotics and Automation Letters, vol. 10, no. 1, pp. 780–787, 2025
work page 2025
-
[14]
Continuum robot state estimation using Gaussian process regression on SE(3),
S. Lilge, T. D. Barfoot, and J. Burgner-Kahrs, “Continuum robot state estimation using Gaussian process regression on SE(3),”The Interna- tional Journal of Robotics Research, vol. 41, no. 13-14, pp. 1099–1120, 2022
work page 2022
-
[15]
Unified shape and external load state estimation for continuum robots,
J. M. Ferguson, D. C. Rucker, and R. J. Webster, “Unified shape and external load state estimation for continuum robots,”IEEE Transactions on Robotics, vol. 40, pp. 1813–1827, 2024
work page 2024
-
[16]
Continuum robot state estimation with actuation uncertainty,
J. M. Ferguson, A. Kuntz, and T. Hermans, “Continuum robot state estimation with actuation uncertainty,” 2026. [Online]. Available: https://arxiv.org/abs/2601.04493
work page internal anchor Pith review arXiv 2026
-
[17]
On the exponential solution of differential equations for a linear operator,
W. Magnus, “On the exponential solution of differential equations for a linear operator,”Communications on Pure and Applied Mathematics, vol. 7, no. 4, pp. 649–673, 1954
work page 1954
-
[18]
Screw- based modeling of soft manipulators with tendon and fluidic actuation,
F. Renda, M. Cianchetti, H. Abidi, J. Dias, and L. Seneviratne, “Screw- based modeling of soft manipulators with tendon and fluidic actuation,” Journal of Mechanisms and Robotics, vol. 9, no. 4, p. 041012, 05 2017
work page 2017
-
[19]
Factor graphs for robot perception,
F. Dellaert and M. Kaess, “Factor graphs for robot perception,”Found. Trends Robot, vol. 6, no. 1–2, p. 1–139, Aug. 2017
work page 2017
-
[20]
Strain-based shape and 3-d force estimation for rod-driven continuum robots with stretch sensors,
P. Wang, D. Feliu-Talegon, Y . Sun, Z. Xie, W. Xin, M. S. Nazeer, C. D. Santina, C. Laschi, and F. Renda, “Strain-based shape and 3-d force estimation for rod-driven continuum robots with stretch sensors,”IEEE Transactions on Robotics, vol. 42, pp. 894–911, 2026
work page 2026
-
[21]
Y . A. Adamu, D. Feliu-Talegon, A. T. Mathew, and F. Renda, “3-axis angular strain estimation with hall effect sensors for proprioception of soft robotic manipulators,”IEEE Robotics and Automation Letters, vol. 10, no. 9, pp. 8666–8673, 2025
work page 2025
-
[22]
P. C. Hansen,Rank-Deficient and Discrete Ill-Posed Problems: Numer- ical Aspects of Linear Inversion. Philadelphia, PA: SIAM, 1998
work page 1998
-
[23]
A micro lie theory for state estimation in robotics,
J. Sol `a, J. Deray, and D. Atchuthan, “A micro Lie theory for state estimation in robotics,” 2021. [Online]. Available: https: //arxiv.org/abs/1812.01537
-
[24]
How to model tendon-driven continuum robots and benchmark modelling perfor- mance,
P. Rao, Q. Peyron, S. Lilge, and J. Burgner-Kahrs, “How to model tendon-driven continuum robots and benchmark modelling perfor- mance,”Frontiers in Robotics and AI, vol. V olume 7 - 2020, 2021
work page 2020
-
[25]
Dellaert and GTSAM Contributors
F. Dellaert and GTSAM Contributors. (2022, May) borglab/gtsam. [Online]. Available: https://github.com/borglab/gtsam)
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.