Recognition: unknown
Fed3D: Federated 3D Object Detection
Pith reviewed 2026-05-10 08:17 UTC · model grok-4.3
The pith
Federated learning for 3D object detection becomes practical through class-balanced gradients and compact prompt sharing that preserves privacy while lowering bandwidth needs.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
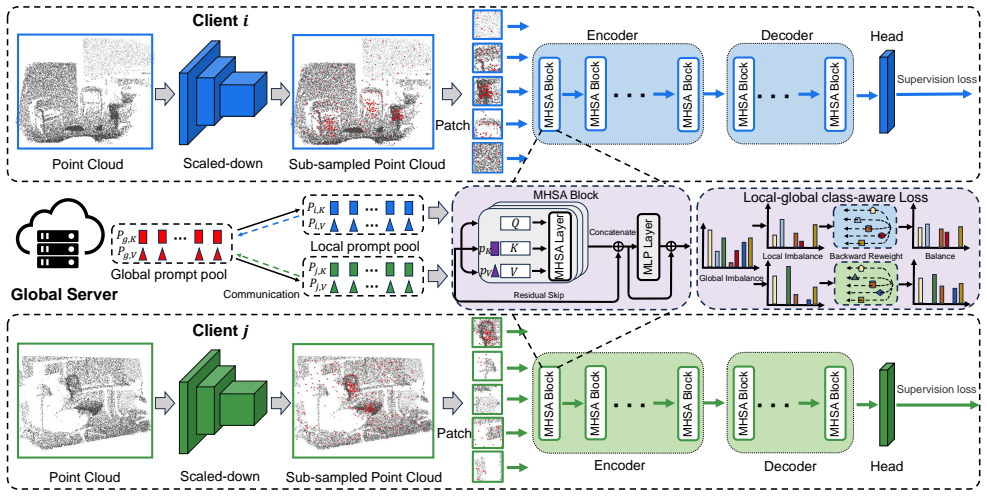
Fed3D shows that 3D object detection can be trained in a federated setting by combining a local-global class-aware loss, which balances back-propagation rates for different categories from local and overall perspectives, with a federated 3D prompt module that communicates only a few learnable parameters per round instead of the entire model, thereby handling data heterogeneity and bandwidth constraints while maintaining performance on limited local data.
What carries the argument
The local-global class-aware loss that adjusts gradient flow across categories locally and globally, paired with the federated 3D prompt module that learns and exchanges only a small number of prompt parameters to adapt the detector without full model transmission.
Load-bearing premise
The local-global class-aware loss and federated 3D prompt module will effectively handle 3D data heterogeneity and bandwidth limits without creating new failure modes or accuracy losses.
What would settle it
A controlled test on datasets with completely disjoint object categories across robots where the prompt module produces no accuracy gain over standard federated averaging despite the added mechanisms.
Figures


read the original abstract
3D object detection models trained in one server plays an important role in autonomous driving, robotics manipulation, and augmented reality scenarios. However, most existing methods face severe privacy concern when deployed on a multi-robot perception network to explore large-scale 3D scene. Meanwhile, it is highly challenging to employ conventional federated learning methods on 3D object detection scenes, due to the 3D data heterogeneity and limited communication bandwidth. In this paper, we take the first attempt to propose a novel Federated 3D object detection framework (i.e., Fed3D), to enable distributed learning for 3D object detection with privacy preservation. Specifically, considering the irregular input 3D object in local robot and various category distribution between robots could cause local heterogeneity and global heterogeneity, respectively. We then propose a local-global class-aware loss for the 3D data heterogeneity issue, which could balance gradient back-propagation rate of different 3D categories from local and global aspects. To reduce communication cost on each round, we develop a federated 3D prompt module, which could only learn and communicate the prompts with few learnable parameters. To the end, several extensive experiments on federated 3D object detection show that our Fed3D model significantly outperforms state-of-the-art algorithms with lower communication cost when providing the limited local training data.
Editorial analysis
A structured set of objections, weighed in public.
Circularity Check
No significant circularity
full rationale
The paper introduces a novel Fed3D framework by defining a local-global class-aware loss to balance gradients across heterogeneous 3D categories and a federated 3D prompt module with few learnable parameters to reduce communication. These are presented as new design choices to address privacy, heterogeneity, and bandwidth issues rather than being derived from or equivalent to fitted target metrics, self-citations, or prior ansatzes. The outperformance claim rests on experimental results with limited local data, not on a mathematical chain that reduces to its own inputs by construction. No load-bearing steps match the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
3d object detection with pointformer,
X. Pan, Z. Xia, S. Song, L. E. Li, and G. Huang, “3d object detection with pointformer,” inCVPR, 2021, pp. 7463–7472
2021
-
[3]
Multi-view 3d object detection network for autonomous driving,
X. Chen, H. Ma, J. Wan, B. Li, and T. Xia, “Multi-view 3d object detection network for autonomous driving,” inCVPR, 2017, pp. 1907– 1915
2017
-
[4]
A comprehensive study of 3-d vision-based robot manipulation,
Y . Cong, R. Chen, B. Ma, H. Liu, D. Hou, and C. Yang, “A comprehensive study of 3-d vision-based robot manipulation,”IEEE Transactions on Cybernetics, vol. 53, no. 3, pp. 1682–1698, 2021
2021
-
[5]
Fcaf3d: Fully convolutional anchor-free 3d object detection,
D. Rukhovich, A. V orontsova, and A. Konushin, “Fcaf3d: Fully convolutional anchor-free 3d object detection,” inECCV. Springer, 2022, pp. 477–493
2022
-
[6]
Deep hough voting for 3d object detection in point clouds,
C. R. Qi, O. Litany, K. He, and L. J. Guibas, “Deep hough voting for 3d object detection in point clouds,” inICCV, 2019, pp. 9277–9286
2019
-
[7]
H3dnet: 3d object detection using hybrid geometric primitives,
Z. Zhang, B. Sun, H. Yang, and Q. Huang, “H3dnet: 3d object detection using hybrid geometric primitives,” inECCV. Springer, 2020, pp. 311–329
2020
-
[8]
Splitfed: When federated learning meets split learning,
C. Thapa, P. C. M. Arachchige, S. Camtepe, and L. Sun, “Splitfed: When federated learning meets split learning,” inAAAI, vol. 36, no. 8, 2022, pp. 8485–8493
2022
-
[9]
Feddg: Federated domain generalization on medical image segmentation via episodic learning in continuous frequency space,
Q. Liu, C. Chen, J. Qin, Q. Dou, and P.-A. Heng, “Feddg: Federated domain generalization on medical image segmentation via episodic learning in continuous frequency space,” inCVPR, 2021, pp. 1013– 1023
2021
-
[10]
Federated semi-supervised learning for covid region segmentation in chest ct using multi-national data from china, italy, japan,
D. Yang, Z. Xu, W. Li, A. Myronenko, H. R. Roth, S. Harmon, S. Xu, B. Turkbey, E. Turkbey, X. Wanget al., “Federated semi-supervised learning for covid region segmentation in chest ct using multi-national data from china, italy, japan,”Medical image analysis, vol. 70, p. 101992, 2021
2021
-
[11]
Communication-efficient learning of deep networks from decentral- ized data,
B. McMahan, E. Moore, D. Ramage, S. Hampson, and B. A. y Arcas, “Communication-efficient learning of deep networks from decentral- ized data,” inAISTATS. PMLR, 2017, pp. 1273–1282
2017
-
[12]
Scannet: Richly-annotated 3d reconstructions of indoor scenes,
A. Dai, A. X. Chang, M. Savva, M. Halber, T. Funkhouser, and M. Nießner, “Scannet: Richly-annotated 3d reconstructions of indoor scenes,” inCVPR, 2017, pp. 5828–5839
2017
-
[13]
Sun rgb-d: A rgb-d scene understanding benchmark suite,
S. Song, S. P. Lichtenberg, and J. Xiao, “Sun rgb-d: A rgb-d scene understanding benchmark suite,” inCVPR, 2015, pp. 567–576
2015
-
[14]
Pimae: Point cloud and image interactive masked autoencoders for 3d object detection,
A. Chen, K. Zhang, R. Zhang, Z. Wang, Y . Lu, Y . Guo, and S. Zhang, “Pimae: Point cloud and image interactive masked autoencoders for 3d object detection,” inCVPR, 2023, pp. 5291–5301
2023
-
[15]
Advances and open problems in federated learning,
P. Kairouz, H. B. McMahan, B. Avent, A. Bellet, M. Bennis, A. N. Bhagoji, K. Bonawitz, Z. Charles, G. Cormode, R. Cummingset al., “Advances and open problems in federated learning,”Foundations and Trends® in Machine Learning, vol. 14, no. 1–2, pp. 1–210, 2021
2021
-
[16]
Privacy-preserving federated brain tumour segmentation,
W. Li, F. Milletar `ı, D. Xu, N. Rieke, J. Hancox, W. Zhu, M. Baust, Y . Cheng, S. Ourselin, M. J. Cardosoet al., “Privacy-preserving federated brain tumour segmentation,” inMLMI. Springer, 2019, pp. 133–141
2019
-
[17]
Ensemble attention distillation for privacy-preserving federated learning,
X. Gong, A. Sharma, S. Karanam, Z. Wu, T. Chen, D. Doermann, and A. Innanje, “Ensemble attention distillation for privacy-preserving federated learning,” inICCV, 2021, pp. 15 076–15 086
2021
-
[18]
Fine-tuning global model via data-free knowledge distillation for non-iid federated learning,
L. Zhang, L. Shen, L. Ding, D. Tao, and L.-Y . Duan, “Fine-tuning global model via data-free knowledge distillation for non-iid federated learning,” inCVPR, 2022, pp. 10 174–10 183
2022
-
[19]
Fedproto: Federated prototype learning across heterogeneous clients,
Y . Tan, G. Long, L. Liu, T. Zhou, Q. Lu, J. Jiang, and C. Zhang, “Fedproto: Federated prototype learning across heterogeneous clients,” inAAAI, vol. 36, no. 8, 2022, pp. 8432–8440
2022
-
[20]
Federated optimization in heterogeneous networks,
T. Li, A. K. Sahu, M. Zaheer, M. Sanjabi, A. Talwalkar, and V . Smith, “Federated optimization in heterogeneous networks,”Proceedings of Machine learning and systems, vol. 2, pp. 429–450, 2020
2020
-
[21]
Scaffold: Stochastic controlled averaging for federated learning,
S. P. Karimireddy, S. Kale, M. Mohri, S. Reddi, S. Stich, and A. T. Suresh, “Scaffold: Stochastic controlled averaging for federated learning,” inICML. PMLR, 2020, pp. 5132–5143
2020
-
[22]
Model-contrastive federated learning,
Q. Li, B. He, and D. Song, “Model-contrastive federated learning,” in CVPR, 2021, pp. 10 713–10 722
2021
-
[23]
Manoj Ghuhan Arivazhagan, Vinay Aggarwal, Aaditya Kumar Singh, and Sunav Choudhary
D. A. E. Acar, Y . Zhao, R. M. Navarro, M. Mattina, P. N. Whatmough, and V . Saligrama, “Federated learning based on dynamic regulariza- tion,”arXiv preprint arXiv:2111.04263, 2021
-
[24]
Local learning matters: Rethinking data heterogeneity in federated learning,
M. Mendieta, T. Yang, P. Wang, M. Lee, Z. Ding, and C. Chen, “Local learning matters: Rethinking data heterogeneity in federated learning,” inCVPR, 2022, pp. 8397–8406
2022
-
[25]
Data poisoning attacks on federated machine learning,
G. Sun, Y . Cong, J. Dong, Q. Wang, L. Lyu, and J. Liu, “Data poisoning attacks on federated machine learning,”IEEE Internet of Things Journal, vol. 9, no. 13, pp. 11 365–11 375, 2022
2022
-
[26]
Fedvision: An online visual object detection platform powered by federated learning,
Y . Liu, A. Huang, Y . Luo, H. Huang, Y . Liu, Y . Chen, L. Feng, T. Chen, H. Yu, and Q. Yang, “Fedvision: An online visual object detection platform powered by federated learning,” inAAAI, vol. 34, no. 08, 2020, pp. 13 172–13 179
2020
-
[27]
V oxelnet: End-to-end learning for point cloud based 3d object detection,
Y . Zhou and O. Tuzel, “V oxelnet: End-to-end learning for point cloud based 3d object detection,” inCVPR, 2018, pp. 4490–4499
2018
-
[28]
Mvx-net: Multimodal voxelnet for 3d object detection,
V . A. Sindagi, Y . Zhou, and O. Tuzel, “Mvx-net: Multimodal voxelnet for 3d object detection,” inICRA. IEEE, 2019, pp. 7276–7282
2019
-
[29]
Mlcvnet: Multi-level context votenet for 3d object detection,
Q. Xie, Y .-K. Lai, J. Wu, Z. Wang, Y . Zhang, K. Xu, and J. Wang, “Mlcvnet: Multi-level context votenet for 3d object detection,” in CVPR, 2020, pp. 10 447–10 456
2020
-
[30]
Fcos3d: Fully convolutional one-stage monocular 3d object detection,
T. Wang, X. Zhu, J. Pang, and D. Lin, “Fcos3d: Fully convolutional one-stage monocular 3d object detection,” inICCV, 2021, pp. 913– 922
2021
-
[31]
Swformer: Sparse window transformer for 3d object detection in point clouds,
P. Sun, M. Tan, W. Wang, C. Liu, F. Xia, Z. Leng, and D. Anguelov, “Swformer: Sparse window transformer for 3d object detection in point clouds,” inECCV. Springer, 2022, pp. 426–442
2022
-
[32]
An end-to-end transformer model for 3d object detection,
I. Misra, R. Girdhar, and A. Joulin, “An end-to-end transformer model for 3d object detection,” inICCV, 2021, pp. 2906–2917
2021
-
[33]
Group-free 3d object detection via transformers,
Z. Liu, Z. Zhang, Y . Cao, H. Hu, and X. Tong, “Group-free 3d object detection via transformers,” inICCV, 2021, pp. 2949–2958
2021
-
[34]
Polarformer: Multi-camera 3d object detection with polar transformer,
Y . Jiang, L. Zhang, Z. Miao, X. Zhu, J. Gao, W. Hu, and Y .-G. Jiang, “Polarformer: Multi-camera 3d object detection with polar transformer,” inAAAI, vol. 37, no. 1, 2023, pp. 1042–1050
2023
-
[35]
Pointnet++: Deep hierarchical feature learning on point sets in a metric space,
C. R. Qi, L. Yi, H. Su, and L. J. Guibas, “Pointnet++: Deep hierarchical feature learning on point sets in a metric space,”Advances in neural information processing systems, vol. 30, 2017
2017
-
[36]
Addressing class imbalance in federated learning,
L. Wang, S. Xu, X. Wang, and Q. Zhu, “Addressing class imbalance in federated learning,” inAAAI, vol. 35, no. 11, 2021, pp. 10 165–10 173
2021
-
[37]
Federated class-incremental learning,
J. Dong, L. Wang, Z. Fang, G. Sun, S. Xu, X. Wang, and Q. Zhu, “Federated class-incremental learning,” inCVPR, 2022, pp. 10 164– 10 173
2022
-
[38]
Prefix-Tuning: Optimizing Continuous Prompts for Generation
X. L. Li and P. Liang, “Prefix-tuning: Optimizing continuous prompts for generation,”arXiv preprint arXiv:2101.00190, 2021
work page internal anchor Pith review arXiv 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.