Recognition: unknown
When does a control system compute? Digital, mechanical and open-loop systems
Pith reviewed 2026-05-10 06:49 UTC · model grok-4.3
The pith
All control systems perform computation, including purely mechanical and open-loop ones, because the plant serves as the representational user of the controller.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
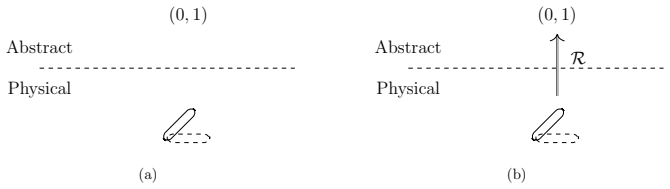
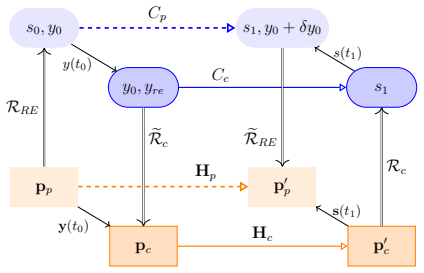
Using ART, the plant is modeled as the representational user that interprets the controller's physical states as standing for desired plant behaviors; this modeling establishes that the controller is computing in every examined system. The same structure applies to digital, electromechanical, purely mechanical, and open-loop cases alike, so control systems in general perform computation.
What carries the argument
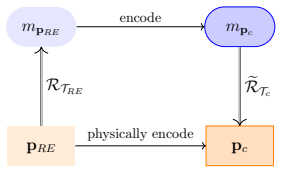
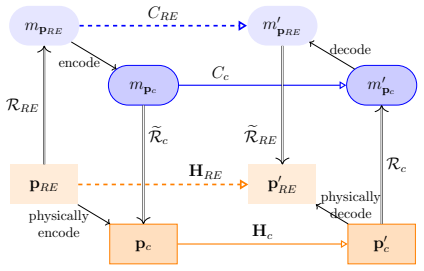
Abstraction/Representation theory (ART), which defines computation in a physical system by the presence of a distinct representational user that abstracts and employs the system's states; the plant fulfills this user role for the controller.
If this is right
- Every control system, regardless of implementation technology, performs computation once the plant is recognized as the user.
- The centrifugal governor computes, removing it as a counter-example in discussions of computationalism.
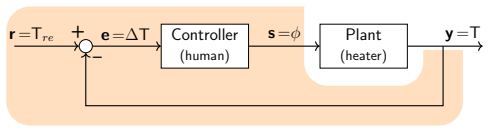
- Open-loop systems under human control also exhibit computation via the same plant-user structure.
- The criterion extends to any engineered or natural control process that maintains a plant within limits.
Where Pith is reading between the lines
- Biological regulatory loops may be analyzed for computation using the same plant-as-user mapping.
- Mechanical control devices could be re-examined as minimal computers without requiring digital components.
- Design of future controllers might deliberately exploit the representational relation to the plant to achieve specific computational behaviors.
Load-bearing premise
Abstraction/representation theory supplies a sufficient non-circular criterion for identifying computation, and the plant can be treated unambiguously as the representational user of the controller.
What would settle it
An explicit control system in which the plant's states cannot be interpreted as representations of the controller's outputs while still satisfying all physical descriptions of the loop.
Figures


















read the original abstract
Control systems are ubiquitous in modern technology, comprising an engineered plant to be kept within specific, often fine-tuned, limits, and a separate controller that ensures this is the case. While modern controllers often employ digital computers, other examples are purely mechanical, or even biological. It is an open question whether computation is happening within all controllers by virtue of them being part of a control system. Abstraction/ Representation theory (ART) has been developed to tackle just this question of whether a physical system is computing. Here, we demonstrate how to use ART to model control systems, and analyse them for computational properties. We determine that the plant of a control system is (a proxy for) the representational entity necessary in ART for the existence of any computation: the plant is the user of the controller. We consider specific systems: a digital thermostat, an electro-mechanical thermostat, the purely mechanical centrifugal governor, and an open-loop human-controlled heating system. We show that all these systems, and control systems in general, are performing some degree of computation. As an initial use of these results, we apply them to computationalism within cognitive theory: we show the governor is computing, so it cannot play its role of counter-example in the question of whether the brain is too.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript applies Abstraction/Representation Theory (ART) to control systems, arguing that the plant functions as the representational entity (or 'user') of the controller. This leads to the conclusion that digital thermostats, electro-mechanical thermostats, the centrifugal governor, and open-loop systems all perform computation to some degree. The results are then used to claim that the governor cannot serve as a counter-example in debates over computationalism in cognitive science.
Significance. If the plant-as-user mapping is independently justified, the paper supplies a concrete criterion for detecting computation in physical control systems and directly engages computationalism debates by reclassifying a classic mechanical example. The breadth of cases (digital, mechanical, open-loop) and the explicit link to cognitive theory are strengths.
major comments (2)
- [Abstract] Abstract: the assertion that 'the plant of a control system is (a proxy for) the representational entity necessary in ART' is presented as a modeling step rather than derived from ART's definitions of abstraction and user capacities. Without an explicit check that the plant (e.g., flyball speed or room temperature) satisfies those criteria independently of the control relation, the central claim that every control system computes risks circularity.
- [Centrifugal governor analysis] Centrifugal governor analysis: treating the physical plant (flyball speed) as the entity that 'interprets' the controller's state as a representation is asserted via the feedback loop; an independent demonstration that the plant performs the requisite abstraction steps required by ART is needed to support the claim that the governor computes.
minor comments (2)
- [Abstract] The abstract states that 'all these systems... are performing some degree of computation' but does not indicate how the degree is measured or compared across examples; a brief comparative table or metric would improve clarity.
- [Introduction] Citations to the foundational ART papers should be supplied in the introduction so that readers can verify the precise criteria being applied.
Simulated Author's Rebuttal
We thank the referee for their constructive and detailed comments. These help clarify how to strengthen the presentation of the plant-as-user mapping. We address each major comment below and will revise the manuscript to make the derivations from ART more explicit.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion that 'the plant of a control system is (a proxy for) the representational entity necessary in ART' is presented as a modeling step rather than derived from ART's definitions of abstraction and user capacities. Without an explicit check that the plant (e.g., flyball speed or room temperature) satisfies those criteria independently of the control relation, the central claim that every control system computes risks circularity.
Authors: We agree that greater explicitness is needed to forestall any appearance of circularity. In the revised manuscript we will add a short dedicated paragraph right after the abstract. This paragraph will first restate ART's definitions of abstraction, representation, and the user's required capacities (the ability to treat one physical state as standing for another and to employ that standing-for relation in goal-directed behavior). It will then show, without presupposing the feedback loop, that the plant's state variables satisfy these capacities: the controller output functions as a representation of the plant's current condition, and the plant's own dynamics use that representation to adjust toward its operational goal (stable temperature, constant speed, etc.). This step-by-step grounding derives the mapping directly from ART rather than from the control relation itself. revision: yes
-
Referee: [Centrifugal governor analysis] Centrifugal governor analysis: treating the physical plant (flyball speed) as the entity that 'interprets' the controller's state as a representation is asserted via the feedback loop; an independent demonstration that the plant performs the requisite abstraction steps required by ART is needed to support the claim that the governor computes.
Authors: We accept the need for an independent demonstration and will expand the governor section accordingly. The revision will insert a numbered, step-by-step mapping that isolates ART's abstraction process from the closed-loop dynamics. We will show that the mechanical linkage itself performs the abstraction (flyball height stands for engine speed via the geometry of the arms), and that the plant (the engine) uses this standing-for relation through its physical response to achieve the goal of regulated operation. Because this account rests only on the physical properties and goal structure of the components, it does not rely on the feedback loop for its justification. The expanded analysis will therefore support the computation claim on ART's own terms. revision: yes
Circularity Check
ART applied as external framework; plant-as-user is modeling step, not internal reduction.
full rationale
The paper invokes Abstraction/Representation theory (ART) from prior literature to analyze control systems, treating the plant as the representational user required by that theory. This is a self-citation of the authors' own framework, but the central claim consists of applying the external criteria to concrete examples (digital thermostat, centrifugal governor, open-loop heating) rather than deriving the existence of computation from a definition internal to this manuscript. No equations or steps reduce the conclusion to a fitted input or self-referential loop within the paper itself. The analysis therefore remains non-circular at the level of derivation, though the modeling choice of plant-as-user inherits whatever foundational assumptions ART carries.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Abstraction/Representation theory correctly identifies when a physical system is performing computation.
Reference graph
Works this paper leans on
-
[1]
Baez and J
J. Baez and J. Erbele. Categories in Control.Theory and Applications of Categories, 30(24):836–881, 2015
2015
-
[2]
Brendan Fong, Pawe l Soboci´ nski, and Paolo Rapisarda. A categorical ap- proach to open and interconnected dynamical systems. InLICS’16, pages 495–504. ACM, 2016. doi: 10.1145/2933575.2934556
-
[3]
What Might Cognition Be, If Not Computation?The Journal of Philosophy, 92(7):345–381, 1995
Tim van Gelder. What Might Cognition Be, If Not Computation?The Journal of Philosophy, 92(7):345–381, 1995
1995
-
[4]
Predictions in the eye of the beholder: an active inference account of Watt governors
Manuel Baltieri, Christopher L Buckley, and Jelle Bruineberg. Predictions in the eye of the beholder: an active inference account of Watt governors. InALIFE 2020, pages 121–129. MIT Press, 2020
2020
-
[5]
Jonathan Cape, 2006
Seth Lloyd.Programming the Universe: A Quantum Computer Scientist Takes on the Cosmos. Jonathan Cape, 2006
2006
-
[6]
A. M. Turing. On computable numbers, with an application to the Entschei- dungsproblem.Proc. London Math. Soc., s2–42(1):230–265, January 1937. doi: 10.1112/plms/s2-42.1.230
-
[7]
C. E. Shannon. Mathematical Theory of the Differential Analyzer.Journal of Mathematics and Physics, 20:337–354, 1941
1941
-
[8]
Horsman, Susan Stepney, Rob C
D. Horsman, Susan Stepney, Rob C. Wagner, and Viv Kendon. When does a physical system compute?Proceedings of the Royal Society A, 470(2169): 20140182, 2014
2014
-
[9]
Dominic C. Horsman. Abstraction/representation theory for heterotic physical computing.Philosophical Transactions of the Royal Society A, 373:20140224, 2015
2015
-
[10]
The Natural Science of Computation.Comms
Dominic Horsman, Susan Stepney, and Viv Kendon. The Natural Science of Computation.Comms. ACM, 60(8):31–34, 2017
2017
-
[11]
Abstrac- tion/Representation Theory and the Natural Science of Computation
Dominic Horsman, Viv Kendon, and Susan Stepney. Abstrac- tion/Representation Theory and the Natural Science of Computation. In Michael E. Cuffaro and Samuel C. Fletcher, editors,Physical Perspectives on Computation, Computational Perspectives on Physics, pages 127–149. Cambridge University Press, 2018
2018
-
[12]
Dominic Horsman, Viv Kendon, Susan Stepney, and Peter Young. Abstrac- tion and representation in living organisms: when does a biological system compute? In Gordana Dodig-Crnkovic and Raffaela Giovagnoli, editors, Representation and reality: humans, animals, and machines, pages 91–116. Springer, 2017
2017
-
[13]
The representational entity in physical computing.Natural Computing, 20(2):233–242, 2021
Susan Stepney and Viv Kendon. The representational entity in physical computing.Natural Computing, 20(2):233–242, 2021. doi: 10.1007/s11047- 020-09805-3
-
[14]
Nise.Control Systems Engineering
Norman S. Nise.Control Systems Engineering. Wiley, 8th edition, 2024. 35
2024
-
[15]
J. C. Maxwell. On governors.Proceedings of the Royal Society, 16:270–283, 1868
-
[16]
Delco Electronics.Apollo 15 Delco CSM/LM Computer Manual, 1971.https://www.nasa.gov/history/alsj/a15/a15Delco.html, ac- cessed 2025-11-11
1971
-
[17]
Buskohl, Andrew Gillman, Todd D
Hiromi Yasuda, Philip R. Buskohl, Andrew Gillman, Todd D. Murphey, Susan Stepney, Richard A. Vaia, and Jordan R. Raney. Mechanical com- puting.Nature, 598:39–48, 2021. doi: 10.1038/s41586-021-03623-y
-
[18]
Nonclassical computation: a dynamical systems perspec- tive
Susan Stepney. Nonclassical computation: a dynamical systems perspec- tive. In Grzegorz Rozenberg, Thomas B¨ ack, and Joost N. Kok, editors, Handbook of Natural Computing, volume 4, chapter 59, pages 1979–2025. Springer, 2012. doi: 10.1007/978-3-540-92910-9 59
-
[19]
echo state
Herbert Jaeger. The “echo state” approach to analysing and training re- current neural networks – with an erratum note.Bonn, Germany: German National Research Center for Information Technology GMD Technical Re- port, 148(34):13, 2001
2001
-
[20]
Information process- ing using a single dynamical node as complex system.Nature Communi- cations, 2:468, September 2011
L Appeltant, M C Soriano, G Van der Sande, J Danckaert, S Massar, J Dambre, B Schrauwen, C R Mirasso, and I Fischer. Information process- ing using a single dynamical node as complex system.Nature Communi- cations, 2:468, September 2011
2011
-
[21]
Physical reservoir computing: A tuto- rial,
Susan Stepney. Physical reservoir computing: a tutorial.Natural Comput- ing, 23(4):665–685, 2024. doi: 10.1007/s11047-024-09997-y
-
[22]
Janet Anders and Dan E. Browne. Computational power of correla- tions.Physical Review Letters, 102(5):050502, 2009. doi: 10.1103/Phys- RevLett.102.050502
-
[23]
Charles Babbage’s Difference Engine No
Doron Swade. Charles Babbage’s Difference Engine No. 2: Technical De- scription. Technical Report 4, Science Museum Papers in the History of Technology, 1995
1995
-
[24]
Fuegi and Francis. Lovelace & Babbage and the Creation of the 1843 ’Notes’.IEEE Annals of the History of Computing, 25(4):16–26, 2003. doi: 10.1109/MAHC.2003.1253887
-
[25]
Blaise Pascal (1623-1662) Tercentenary of the Calculating Machine.Nature, 150:508–509, 1942
S Chapman. Blaise Pascal (1623-1662) Tercentenary of the Calculating Machine.Nature, 150:508–509, 1942. ISSN 0028-0836,1476-4687
1942
-
[26]
The calculating machine of Blaise Pascal.Philips Technical Review, 24(4/5):102–105, 1962
S Gradstein. The calculating machine of Blaise Pascal.Philips Technical Review, 24(4/5):102–105, 1962
1962
-
[27]
Springer
Susan Stepney, Steen Rasmussen, and Martyn Amos, editors.Computa- tional Matter, 2018. Springer. 36
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.