A B-Spline Function Based 3D Point Cloud Unwrapping Scheme for 3D Fingerprint Recognition and Identification
Pith reviewed 2026-05-10 08:42 UTC · model grok-4.3
The pith
B-spline curve fitting unwraps 3D fingerprint point clouds into grayscale images that standard 2D methods can match with low error.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
B-spline function fitting applied to a 3D fingerprint point cloud produces an unwrapped representation whose relative heights map to a grayscale image; this image supports standard 2D fingerprint recognition and identification with equal error rates below 0.3 percent, including 1.50 percent in cross-session trials that include registration variation.
What carries the argument
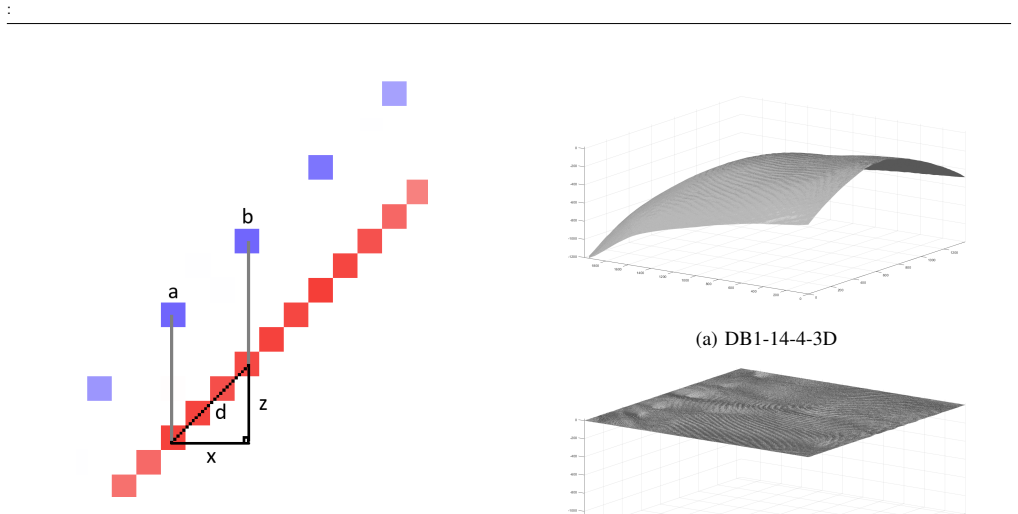
B-spline curve fitting on the 3D point cloud that unwraps the curved fingerprint surface and enables height-to-grayscale conversion for 2D processing.
If this is right
- Standard 2D fingerprint software can process 3D data without new 3D-specific matchers.
- Recognition remains reliable even when finger placement varies in orientation or position.
- Contactless 3D capture becomes more usable in practice because registration sensitivity drops.
- The same unwrapped images support both verification and identification tasks at the reported error levels.
Where Pith is reading between the lines
- The same curve-fitting step could be tested on other curved biometric surfaces such as palm or ear data.
- Varying the number of B-spline control points might reveal an optimal trade-off between smoothness and detail retention.
- Combining the grayscale output with original depth values could further reduce error in high-security settings.
Load-bearing premise
B-spline fitting on the point cloud preserves ridge and valley patterns without adding distortions that would lower later matching accuracy after height-to-grayscale mapping.
What would settle it
If direct matching on the original 3D point clouds or alternative flattening methods yields equal or lower error rates than the B-spline unwrapped grayscale images on the same cross-session data, the claimed advantage would not hold.
Figures











read the original abstract
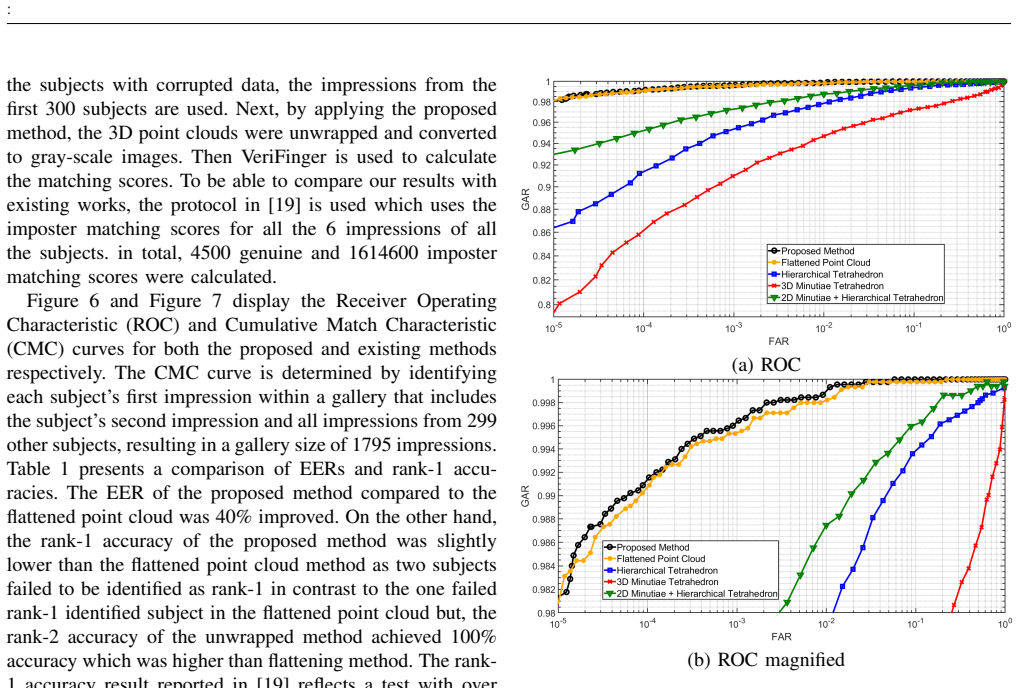
Three-dimensional (3D) fingerprint recognition and identification offer several advantages over traditional two-dimensional (2D) recognition systems. The contactless nature of 3D fingerprints enhances hygiene and security, reducing the risk of contamination and spoofing. In addition to surface ridge and valley patterns, 3D fingerprints capture depth, curvature, and shape information, enabling the development of more precise and robust authentication systems. Despite recent advancements, significant challenges remain. The topological height of fingerprint pixels complicates the extraction of ridge and valley patterns. Furthermore, registration issues limit the acquisition process, requiring consistent direction and orientation across all samples. To address these challenges, this paper introduces a method that unwraps 3D fingerprints, represented as 3D point clouds, using B-spline curve fitting to mitigate height variation and reduce registration limitations. The unwrapped point cloud is then converted into a grayscale image by mapping the relative heights of the points. This grayscale image is subsequently used for recognition through conventional 2D fingerprint identification methods. The proposed approach demonstrated superior performance in 3D fingerprint recognition, achieving Equal Error Rates (EERs) of 0.2072%, 0.26%, and 0.22% across three experiments, outperforming existing methods. Additionally, the method surpassed 3D fingerprint flattening technique in both recognition and identification during cross-session experiments, achieving an EER of 1.50% when fingerprints with varying registrations were included.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a B-spline function-based scheme to unwrap 3D point cloud representations of fingerprints into 2D grayscale images by fitting B-spline curves to mitigate height variations and registration inconsistencies. The resulting images are then processed using standard 2D fingerprint recognition algorithms. The authors report Equal Error Rates (EERs) of 0.2072%, 0.26%, and 0.22% in three experiments, claiming superiority over existing methods, and an EER of 1.50% in cross-session tests with varying registrations, outperforming 3D flattening approaches.
Significance. If the central claim holds—that the B-spline unwrapping faithfully preserves ridge and valley patterns without introducing distortions that degrade recognition performance—this work could provide a valuable, computationally efficient method for leveraging 3D fingerprint data with mature 2D matching techniques. The reported low EERs and cross-session robustness would represent a meaningful advance in contactless biometric systems, particularly for applications requiring hygiene and anti-spoofing measures. The explicit numerical comparisons to baselines strengthen the potential impact.
major comments (4)
- [B-spline Unwrapping subsection] B-spline Unwrapping subsection: The B-spline curve fitting procedure is described at a high level without specifying the spline degree, number of control points, knot spacing, or fitting error tolerance. These parameters directly control the low-pass filtering effect and are load-bearing for the claim that ridge/valley patterns are preserved.
- [Experimental Validation section] Experimental Validation section: No ablation experiments are presented that vary the B-spline parameters (e.g., order or knot density) and report the resulting EERs. Without this, it is impossible to verify that the reported EERs of 0.2072%, 0.26%, and 0.22% are robust rather than tuned to a specific dataset's frequency content.
- [Results and Analysis section] Results and Analysis section: There is no quantitative assessment, such as power spectral density comparison or ridge frequency histograms, of the unwrapped grayscale images versus the original 3D surface to confirm retention of minutiae-level details. This is critical given that the height-to-grayscale mapping could lose discriminatory information if smoothing occurs.
- [Experimental Setup] Experimental Setup: The manuscript does not provide details on the datasets used (number of subjects, samples per subject, acquisition device), cross-validation procedure, or statistical significance testing for the EER differences. These are essential to support the performance claims.
minor comments (2)
- [Abstract] The abstract mentions 'three experiments' but does not briefly indicate what distinguishes them (e.g., different datasets or conditions), which would help readers assess the scope of the claims.
- [Method] The mapping from relative heights to grayscale values is not formalized with an equation, making it difficult to reproduce the exact conversion process.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. These have highlighted areas where additional clarity and analysis will strengthen the manuscript. We respond to each major comment below and will incorporate revisions as indicated.
read point-by-point responses
-
Referee: [B-spline Unwrapping subsection] B-spline Unwrapping subsection: The B-spline curve fitting procedure is described at a high level without specifying the spline degree, number of control points, knot spacing, or fitting error tolerance. These parameters directly control the low-pass filtering effect and are load-bearing for the claim that ridge/valley patterns are preserved.
Authors: We agree that explicit specification of these parameters is essential for reproducibility and to substantiate the preservation claim. In the revised manuscript, we will expand the B-spline Unwrapping subsection to state the spline degree, number of control points, knot spacing, and fitting error tolerance used in our implementation. revision: yes
-
Referee: [Experimental Validation section] Experimental Validation section: No ablation experiments are presented that vary the B-spline parameters (e.g., order or knot density) and report the resulting EERs. Without this, it is impossible to verify that the reported EERs of 0.2072%, 0.26%, and 0.22% are robust rather than tuned to a specific dataset's frequency content.
Authors: We acknowledge the importance of ablation studies for demonstrating robustness. We will add ablation experiments in the revised Experimental Validation section, varying key B-spline parameters such as order and knot density, and report the resulting EERs to confirm that performance remains stable. revision: yes
-
Referee: [Results and Analysis section] Results and Analysis section: There is no quantitative assessment, such as power spectral density comparison or ridge frequency histograms, of the unwrapped grayscale images versus the original 3D surface to confirm retention of minutiae-level details. This is critical given that the height-to-grayscale mapping could lose discriminatory information if smoothing occurs.
Authors: This is a valid concern regarding potential information loss. In the revised Results and Analysis section, we will include quantitative assessments such as power spectral density comparisons and ridge frequency histograms between the unwrapped grayscale images and the original 3D point clouds to verify retention of minutiae-level details. revision: yes
-
Referee: [Experimental Setup] Experimental Setup: The manuscript does not provide details on the datasets used (number of subjects, samples per subject, acquisition device), cross-validation procedure, or statistical significance testing for the EER differences. These are essential to support the performance claims.
Authors: We agree that these details are necessary to support the claims. We will revise the Experimental Setup section to provide complete information on the datasets (including number of subjects and samples), the acquisition device, the cross-validation procedure, and statistical significance testing for the reported EER differences. revision: yes
Circularity Check
No circularity: empirical validation of B-spline unwrapping is independent of method definition
full rationale
The paper defines a B-spline curve-fitting procedure to unwrap 3D point clouds into 2D grayscale images, then reports EERs from separate recognition experiments on fingerprint datasets. No derivation step equates the performance metric to the fitting parameters by construction, no fitted input is relabeled as a prediction, and no self-citation chain supplies the central uniqueness or correctness claim. The reported results (0.2072%, 0.26%, 0.22% EER) are external measurements, not tautological outputs of the unwrapping equations themselves. The derivation chain is therefore self-contained.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Kumar,Contactless 3D fingerprint identification
A. Kumar,Contactless 3D fingerprint identification. Springer, 2018
work page 2018
-
[2]
J. Galbally, S. Marcel, and J. Fierrez, “Image quality assessment for fake biometric detection: Application to iris, fingerprint, and face recognition,”IEEE transactions on image processing, vol. 23, no. 2, pp. 710–724, 2013
work page 2013
-
[3]
Hacking mobile phones using 2d printed fingerprints,
K. Cao and A. K. Jain, “Hacking mobile phones using 2d printed fingerprints,”Dept. Comput. Sci. Eng., Michigan State Univ., East Lansing, MI, USA, Tech. Rep. MSU-CSE-16-2, vol. 6, 2016
work page 2016
-
[4]
Planting attack on latent fingerprints,
M. M. Askarin, K. Wong, and R. C.-W. Phan, “Planting attack on latent fingerprints,”IET Biometrics, vol. 7, no. 5, pp. 396–404, 2018
work page 2018
-
[5]
An introduction to biometric recognition,
A. K. Jain, A. Ross, and S. Prabhakar, “An introduction to biometric recognition,”IEEE Transactions on circuits and systems for video technology, vol. 14, no. 1, pp. 4–20, 2004
work page 2004
-
[6]
R. D. Labati, A. Genovese, V . Piuri, and F. Scotti, “Toward uncon- strained fingerprint recognition: A fully touchless 3-d system based on two views on the move,”IEEE transactions on systems, Man, and cybernetics: systems, vol. 46, no. 2, pp. 202–219, 2015
work page 2015
-
[7]
Data acquisition and processing of 3-d fingerprints,
Y . Wang, L. G. Hassebrook, and D. L. Lau, “Data acquisition and processing of 3-d fingerprints,”IEEE Transactions on Information Forensics and Security, vol. 5, no. 4, pp. 750–760, 2010. 10 VOLUME ,
work page 2010
-
[8]
Towards contactless, low-cost and accurate 3d fingerprint identification,
A. Kumar and C. Kwong, “Towards contactless, low-cost and accurate 3d fingerprint identification,” inProceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2013, pp. 3438–3443
work page 2013
-
[9]
V olumetric fingerprint data analysis using optical coherence tomography,
C. Sousedik, R. Breithaupt, and C. Busch, “V olumetric fingerprint data analysis using optical coherence tomography,” in2013 International Conference of the BIOSIG Special Interest Group (BIOSIG). IEEE, 2013, pp. 1–6
work page 2013
-
[10]
3-d ultrasonic fingerprint sensor-on-a-chip,
H.-Y . Tang, Y . Lu, X. Jiang, E. J. Ng, J. M. Tsai, D. A. Horsley, and B. E. Boser, “3-d ultrasonic fingerprint sensor-on-a-chip,”IEEE Journal of Solid-State Circuits, vol. 51, no. 11, pp. 2522–2533, 2016
work page 2016
-
[11]
Estimating fingerprint de- formation,
A. Ross, S. C. Dass, and A. K. Jain, “Estimating fingerprint de- formation,” inInternational Conference on Biometric Authentication. Springer, 2004, pp. 249–255
work page 2004
-
[12]
D. Maltoni, D. Maio, A. K. Jain, S. Prabhakaret al.,Handbook of fingerprint recognition. Springer, 2009, vol. 2
work page 2009
-
[13]
Mobile, contactless, single-shot, fingerprint capture system,
G. Abramovich, K. Harding, S. Manickam, J. Czechowski, V . Paruchuru, R. Tait, C. Nafis, and A. Vemury, “Mobile, contactless, single-shot, fingerprint capture system,” inBiometric Technology for Human Identification VII, vol. 7667. SPIE, 2010, pp. 70–81
work page 2010
-
[14]
3d touch- less fingerprints: Compatibility with legacy rolled images,
Y . Chen, G. Parziale, E. Diaz-Santana, and A. K. Jain, “3d touch- less fingerprints: Compatibility with legacy rolled images,” in2006 Biometrics Symposium: Special Session on Research at the Biometric Consortium Conference. IEEE, 2006, pp. 1–6
work page 2006
-
[15]
Fit-sphere unwrapping and performance analysis of 3d fingerprints,
Y . Wang, D. L. Lau, and L. G. Hassebrook, “Fit-sphere unwrapping and performance analysis of 3d fingerprints,”Applied Optics, vol. 49, no. 4, pp. 592–600, 2010
work page 2010
-
[16]
3d to 2d fingerprints: Unrolling and distortion correction,
Q. Zhao, A. Jain, and G. Abramovich, “3d to 2d fingerprints: Unrolling and distortion correction,” in2011 International Joint Conference on Biometrics (IJCB). IEEE, 2011, pp. 1–8
work page 2011
-
[17]
Shafaei,3D minutiae extraction in 3D fingerprint scans
S. Shafaei,3D minutiae extraction in 3D fingerprint scans. University of Louisville, 2011
work page 2011
-
[18]
Towards contactless, low-cost and accurate 3d fingerprint identification,
A. Kumar and C. Kwong, “Towards contactless, low-cost and accurate 3d fingerprint identification,”IEEE Trans. Pattern Anal. Mach. Intell., vol. 37, no. 3, pp. 681–696, 2015. [Online]. Available: https://doi.org/10.1109/TPAMI.2014.2339818
-
[19]
Tetrahedron based fast 3d fingerprint identifi- cation using colored leds illumination,
C. Lin and A. Kumar, “Tetrahedron based fast 3d fingerprint identifi- cation using colored leds illumination,”IEEE transactions on pattern analysis and machine intelligence, vol. 40, no. 12, pp. 3022–3033, 2017
work page 2017
-
[20]
X. Yin, Y . Zhu, and J. Hu, “3d fingerprint recognition based on ridge-valley-guided 3d reconstruction and 3d topology polymer fea- ture extraction,”IEEE transactions on pattern analysis and machine intelligence, vol. 43, no. 3, pp. 1085–1091, 2019
work page 2019
-
[21]
M. M. Askarin, J. Hu, M. Wang, X. Yin, and X. Jia, “A b- spline function based 3d point cloud flattening scheme for 3d fin- gerprint recognition and identification,” 14 June, 2024. TechRxiv, DOI:10.36227/techrxiv.171837904.49091761/v1
-
[22]
Neurotechnology, “VeriFinger 13.1 SDK,” http://www.neurotechnology.com/verifinger.html, 2024, (accessed 1 May 2024)
work page 2024
-
[23]
Komzsik,Approximation techniques for engineers
L. Komzsik,Approximation techniques for engineers. CRC press, 2017
work page 2017
-
[24]
The numerical evaluation of b-splines,
M. G. Cox, “The numerical evaluation of b-splines,”IMA Journal of Applied mathematics, vol. 10, no. 2, pp. 134–149, 1972
work page 1972
-
[25]
On calculating with b-splines,
C. De Boor, “On calculating with b-splines,”Journal of Approximation theory, vol. 6, no. 1, pp. 50–62, 1972
work page 1972
-
[26]
The Hong Kong Polytechnic University 3D Fin- gerprint Images Database,
A. Kumar, “The Hong Kong Polytechnic University 3D Fin- gerprint Images Database,” https://www4.comp.polyu.edu.hk/ csa- jaykr/3Dfingerprint.htm, 2013, (accessed 1 May 2024)
work page 2013
-
[27]
The Hong Kong Polytechnic University 3D Fingerprint Images Database Version 2.0,
——, “The Hong Kong Polytechnic University 3D Fingerprint Images Database Version 2.0,” https://web.comp.polyu.edu.hk/csajaykr/3Dfingerv2.htm, 2015, (accessed 1 May 2024)
work page 2015
-
[28]
MathWorks, “Matlab R2023b,” https://au.mathworks.com, 2024, (ac- cessed 1 May 2024)
work page 2024
-
[29]
Microsoft, “Visual Studio,” https://visualstudio.microsoft.com/, 2022, (accessed 1 May 2024). VOLUME , 11
work page 2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.