Recognition: unknown
LiDAR-based Crowd Navigation with Visible Edge Group Representation
Pith reviewed 2026-05-10 07:38 UTC · model grok-4.3
The pith
Group prediction accuracy affects robot navigation performance only marginally in crowded environments, enabling a simplified visible edge-based group representation from LiDAR.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We show that group prediction accuracy affects navigation performance only marginally in crowded environments. Based on this observation, we propose the visible edge-based group representation. We additionally demonstrate via simulation experiments that our navigation framework, integrated with the simplified group representation, performs comparatively in terms of safety and socialness in dense crowds, while achieving faster computation speed. Finally, we deploy our navigation framework on a real robot to explore the benefits of practically deploying group-based representations in the real world.
What carries the argument
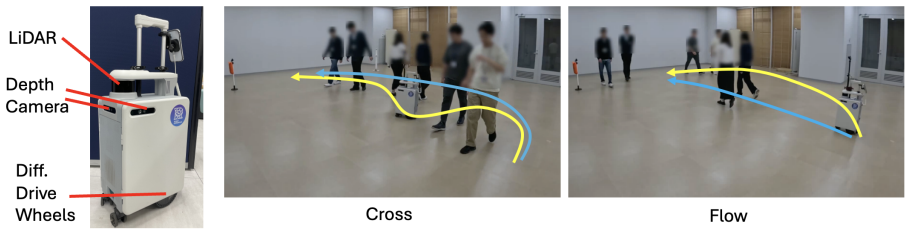
visible edge-based group representation from LiDAR, which captures pedestrian groups via their detectable outer boundaries rather than tracking every individual
If this is right
- Navigation safety and social compliance hold steady even when group assignments contain errors common in occluded crowds.
- Computation time for planning decreases, supporting real-time control in faster-moving or larger crowds.
- Real-world robot deployment becomes feasible without auxiliary sensors or trackers that fail under occlusion.
- Group-aware behavior can be added to existing LiDAR pipelines with minimal added complexity.
Where Pith is reading between the lines
- The marginal impact of group accuracy could allow even coarser approximations, such as treating all nearby pedestrians as one loose group, in extremely dense conditions.
- The approach might transfer to other range sensors if visible boundary extraction can be adapted, broadening sensor options for group navigation.
- Testing with rapidly forming or dissolving groups would show whether the visible-edge focus handles dynamic collective motion better than identity-based methods.
- Coordinating multiple robots could leverage shared visible-edge maps to improve collective flow through the same crowd.
Load-bearing premise
A visible edge-based group representation extracted from LiDAR can be obtained reliably enough in real dense crowds to support the claimed navigation performance without external detection modules.
What would settle it
Run the navigation system in a dense crowd while deliberately degrading or removing the group representation input and measure whether safety metrics such as minimum distance to pedestrians or social metrics such as path deviation increase substantially.
Figures



read the original abstract
Robot navigation in crowded pedestrian environments is a well-known challenge and we explore the practical deployment of group-based representations in this setting. Pedestrian groups have been empirically shown to enable a mobile robot's navigation behavior to be safer and more social. However, existing approaches either explored groups only in limited scenarios with no high-density crowds or depended on external detection modules to track individuals, which are prone to noise and errors due to occlusions in crowds. We show that group prediction accuracy affects navigation performance only marginally in crowded environments. Based on this observation, we propose the visible edge-based group representation. We additionally demonstrate via simulation experiments that our navigation framework, integrated with the simplified group representation, performs comparatively in terms of safety and socialness in dense crowds, while achieving faster computation speed. Finally, we deploy our navigation framework on a real robot to explore the benefits of practically deploying group-based representations in the real world.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a LiDAR-based crowd navigation framework that employs a visible edge group representation extracted directly from point clouds, avoiding external pedestrian detectors. The central claim is that group prediction accuracy affects navigation performance only marginally in crowded environments. Simulation experiments are used to show that the simplified representation yields comparable safety and socialness to more detailed group models while improving computation speed, and a real-robot deployment is reported to explore practical benefits.
Significance. If the marginal-impact claim is substantiated with quantitative validation, the work could simplify perception requirements for social navigation in dense crowds, enabling faster and more deployable systems that rely solely on LiDAR without fragile external modules. The direct use of visible edges addresses occlusion challenges common in real crowds, and the real-robot demonstration provides initial evidence of practicality.
major comments (3)
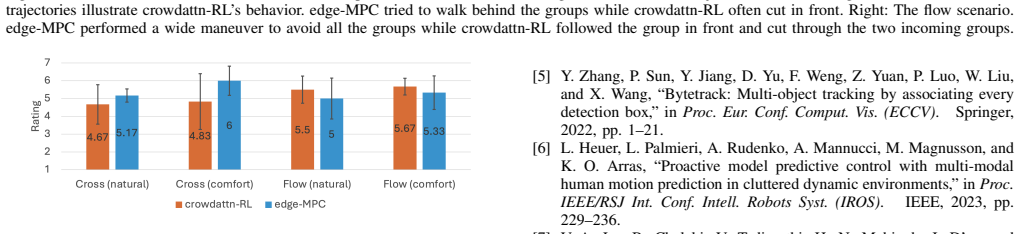
- [Abstract and simulation experiments] Abstract and simulation experiments section: the central claim that group prediction accuracy affects navigation performance only marginally rests on simulation ablations that inject controlled errors, yet no quantitative metrics (e.g., success rates, collision counts, or socialness scores with error bars), baselines, or statistical analysis are provided to establish the size or robustness of the marginal effect.
- [Real-robot deployment] Real-robot deployment section: the deployment is presented qualitatively without any reported quantitative group-extraction accuracy (e.g., precision/recall against ground-truth groups), navigation performance metrics, or ablation that substitutes perfect groups for the visible-edge output under identical real-world conditions, leaving the weakest assumption about reliability in dense crowds untested.
- [Simulation experiments] Simulation experiments section: the synthetic perturbations used to model group-label errors do not demonstrably replicate the structured, non-random errors (fragmented edges, merged clusters) that arise from LiDAR occlusions, partial views, and sensor noise in dense crowds, undermining the transferability of the marginal-effect result to the proposed visible-edge representation.
minor comments (2)
- [Method] The visible-edge group representation would benefit from an explicit algorithmic description or pseudocode to clarify how edges are extracted and grouped from raw LiDAR points.
- [Figures] Figure captions and axis labels in the simulation results could be expanded to include exact metric definitions and the number of trials per condition for improved reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below with point-by-point responses and indicate planned revisions where appropriate.
read point-by-point responses
-
Referee: [Abstract and simulation experiments] Abstract and simulation experiments section: the central claim that group prediction accuracy affects navigation performance only marginally rests on simulation ablations that inject controlled errors, yet no quantitative metrics (e.g., success rates, collision counts, or socialness scores with error bars), baselines, or statistical analysis are provided to establish the size or robustness of the marginal effect.
Authors: We agree that additional quantitative details would strengthen the presentation of the central claim. In the revised manuscript, we will expand the simulation experiments section to include success rates, collision counts, and socialness scores reported with error bars across multiple randomized trials. We will also incorporate comparisons against relevant baselines and apply statistical tests to quantify the marginal effect and assess its robustness. revision: yes
-
Referee: [Real-robot deployment] Real-robot deployment section: the deployment is presented qualitatively without any reported quantitative group-extraction accuracy (e.g., precision/recall against ground-truth groups), navigation performance metrics, or ablation that substitutes perfect groups for the visible-edge output under identical real-world conditions, leaving the weakest assumption about reliability in dense crowds untested.
Authors: The real-robot deployment was included primarily to demonstrate initial practicality rather than to serve as a full quantitative validation. We will revise the section to report available navigation performance metrics from the experiments, such as traversal time and observed safety behaviors. However, computing precision/recall for group extraction requires ground-truth labels that are difficult to obtain in real dense crowds without additional sensors or manual annotation, and we did not conduct an ablation replacing visible-edge groups with perfect groups under the same real-world conditions. We will explicitly note these limitations and the underlying assumptions about reliability. revision: partial
-
Referee: [Simulation experiments] Simulation experiments section: the synthetic perturbations used to model group-label errors do not demonstrably replicate the structured, non-random errors (fragmented edges, merged clusters) that arise from LiDAR occlusions, partial views, and sensor noise in dense crowds, undermining the transferability of the marginal-effect result to the proposed visible-edge representation.
Authors: We acknowledge that the synthetic perturbations represent a controlled simplification and may not capture every structured error pattern observed in real LiDAR data. In the revision, we will add a dedicated discussion explaining the design choices for the perturbation model, including how it approximates common effects such as edge fragmentation and cluster merging. We will also include a brief comparison of error statistics derived from sample real LiDAR point clouds versus the synthetic perturbations to better support transferability of the marginal-effect finding. revision: yes
- The request for a real-world ablation study substituting perfect groups for the visible-edge representation under identical conditions, as no such experiment was performed and obtaining reliable ground-truth group labels in dense real crowds would require substantial additional instrumentation not available in the original deployment.
Circularity Check
No significant circularity; claims rest on empirical experiments
full rationale
The paper's central claim—that group prediction accuracy affects navigation performance only marginally—is presented as an empirical observation from simulation experiments and real-robot deployment, not as a mathematical derivation. No equations, fitted parameters renamed as predictions, self-definitional constructs, or load-bearing self-citations are evident in the abstract or described structure. The visible-edge representation is proposed based on the experimental finding rather than defined in terms of it, and the work does not invoke uniqueness theorems or ansatzes from prior self-citations to force results. The derivation chain is self-contained through direct experimental validation.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
A survey on socially aware robot navigation: Taxonomy and future challenges,
P. T. Singamaneni, P. Bachiller-Burgos, L. J. Manso, A. Garrell, A. Sanfeliu, A. Spalanzani, and R. Alami, “A survey on socially aware robot navigation: Taxonomy and future challenges,”Int. J. Robot. Res., vol. 43, no. 10, pp. 1533–1572, 2024
2024
-
[2]
Unfreezing the robot: Navigation in dense, interacting crowds,
P. Trautman and A. Krause, “Unfreezing the robot: Navigation in dense, interacting crowds,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2010, pp. 797–803
2010
-
[3]
Core challenges of social robot navigation: A survey,
C. Mavrogiannis, F. Baldini, A. Wang, D. Zhao, P. Trautman, A. Stein- feld, and J. Oh, “Core challenges of social robot navigation: A survey,” ACM Trans. Hum.-Robot Interact., vol. 12, no. 3, pp. 1–39, 2023
2023
-
[4]
Tbd pedestrian data collection: Towards rich, portable, and large- scale natural pedestrian data,
A. Wang, D. Sato, Y . Corzo, S. Simkin, A. Biswas, and A. Steinfeld, “Tbd pedestrian data collection: Towards rich, portable, and large- scale natural pedestrian data,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA). IEEE, 2024, pp. 637–644
2024
-
[5]
Bytetrack: Multi-object tracking by associating every detection box,
Y . Zhang, P. Sun, Y . Jiang, D. Yu, F. Weng, Z. Yuan, P. Luo, W. Liu, and X. Wang, “Bytetrack: Multi-object tracking by associating every detection box,” inProc. Eur. Conf. Comput. Vis. (ECCV). Springer, 2022, pp. 1–21
2022
-
[6]
Proactive model predictive control with multi-modal human motion prediction in cluttered dynamic environments,
L. Heuer, L. Palmieri, A. Rudenko, A. Mannucci, M. Magnusson, and K. O. Arras, “Proactive model predictive control with multi-modal human motion prediction in cluttered dynamic environments,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2023, pp. 229–236
2023
-
[7]
Social navigation in crowded environments with model predictive control and deep learning-based human trajectory prediction,
V .-A. Le, B. Chalaki, V . Tadiparthi, H. N. Mahjoub, J. D’sa, and E. Moradi-Pari, “Social navigation in crowded environments with model predictive control and deep learning-based human trajectory prediction,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2024, pp. 4793–4799
2024
-
[8]
Socially competent navigation planning by deep learning of multi-agent path topologies,
C. I. Mavrogiannis, V . Blukis, and R. A. Knepper, “Socially competent navigation planning by deep learning of multi-agent path topologies,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2017, pp. 6817–6824
2017
-
[9]
Robot navigation in dense human crowds: Statistical models and experimental studies of human–robot cooperation,
P. Trautman, J. Ma, R. M. Murray, and A. Krause, “Robot navigation in dense human crowds: Statistical models and experimental studies of human–robot cooperation,”Int. J. Robot. Res., vol. 34, no. 3, pp. 335–356, 2015
2015
-
[10]
Socially aware motion planning with deep reinforcement learning,
Y . F. Chen, M. Everett, M. Liu, and J. P. How, “Socially aware motion planning with deep reinforcement learning,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2017, pp. 1343–1350
2017
-
[11]
Intention aware robot crowd navigation with attention-based interaction graph,
S. Liu, P. Chang, Z. Huang, N. Chakraborty, K. Hong, W. Liang, D. L. McPherson, J. Geng, and K. Driggs-Campbell, “Intention aware robot crowd navigation with attention-based interaction graph,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA). IEEE, 2023, pp. 12 015– 12 021
2023
-
[12]
Navistar: Socially aware robot navigation with hybrid spatio-temporal graph transformer and preference learning,
W. Wang, R. Wang, L. Mao, and B.-C. Min, “Navistar: Socially aware robot navigation with hybrid spatio-temporal graph transformer and preference learning,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2023, pp. 11 348–11 355
2023
-
[13]
Risk- sensitive mobile robot navigation in crowded environment via offline reinforcement learning,
J. Wu, Y . Wang, H. Asama, Q. An, and A. Yamashita, “Risk- sensitive mobile robot navigation in crowded environment via offline reinforcement learning,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2023, pp. 7456–7462
2023
-
[14]
Understanding dynamic social grouping behaviors of pedestrians,
L. Feng and B. Bhanu, “Understanding dynamic social grouping behaviors of pedestrians,”IEEE J. Sel. Topics Signal Process., vol. 9, no. 2, pp. 317–329, 2014
2014
-
[15]
Group-based motion prediction for navigation in crowded environments,
A. Wang, C. Mavrogiannis, and A. Steinfeld, “Group-based motion prediction for navigation in crowded environments,” inProc. Conf. Robot Learn. (CoRL). PMLR, 2022, pp. 871–882
2022
-
[16]
Learning a group-aware policy for robot navigation,
K. Katyal, Y . Gao, J. Markowitz, S. Pohland, C. Rivera, I.-J. Wang, and C.-M. Huang, “Learning a group-aware policy for robot navigation,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2022, pp. 11 328–11 335
2022
-
[17]
Human-aware navigation in crowded environments using adaptive proxemic area and group detection,
C. Medina-S ´anchez, S. Janzon, M. Zella, J. Capit ´an, and P. J. Marr ´on, “Human-aware navigation in crowded environments using adaptive proxemic area and group detection,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2023, pp. 6741–6748
2023
-
[18]
Gson: a group-based social navigation framework with large multimodal model,
S. Luo, P. Sun, J. Zhu, Y . Deng, C. Yu, A. Xiao, and X. Wang, “Gson: a group-based social navigation framework with large multimodal model,”IEEE Robot. Autom. Lett., 2025
2025
-
[19]
Group- aware robot navigation in crowds using spatio-temporal graph attention network with deep reinforcement learning,
X. Lu, A. Faragasso, Y . Wang, A. Yamashita, and H. Asama, “Group- aware robot navigation in crowds using spatio-temporal graph attention network with deep reinforcement learning,”IEEE Robot. Autom. Lett., 2025
2025
-
[20]
Koffka,Principles of Gestalt psychology
K. Koffka,Principles of Gestalt psychology. Routledge, 2013
2013
-
[21]
Social force model for pedestrian dynam- ics,
D. Helbing and P. Molnar, “Social force model for pedestrian dynam- ics,”Phys. Rev. E, vol. 51, no. 5, p. 4282, 1995
1995
-
[22]
Reciprocal velocity obstacles for real-time multi-agent navigation,
J. Van den Berg, M. Lin, and D. Manocha, “Reciprocal velocity obstacles for real-time multi-agent navigation,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA). IEEE, 2008, pp. 1928–1935
2008
-
[23]
Human-aware naviga- tion planner for diverse human-robot interaction contexts,
P. T. Singamaneni, A. Favier, and R. Alami, “Human-aware naviga- tion planner for diverse human-robot interaction contexts,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2021, pp. 5817–5824
2021
-
[24]
Mixed strategy nash equilibrium for crowd navigation,
M. Muchen Sun, F. Baldini, K. Hughes, P. Trautman, and T. Murphey, “Mixed strategy nash equilibrium for crowd navigation,”Int. J. Robot. Res., vol. 44, no. 7, pp. 1156–1185, 2025
2025
-
[25]
Probabilistic dynamic crowd prediction for social navigation,
S. H. Kiss, K. Katuwandeniya, A. Alempijevic, and T. Vidal-Calleja, “Probabilistic dynamic crowd prediction for social navigation,” in Proc. IEEE Int. Conf. Robot. Autom. (ICRA). IEEE, 2021, pp. 9269– 9275
2021
-
[26]
You’ll never walk alone: Modeling social behavior for multi-target tracking,
S. Pellegrini, A. Ess, K. Schindler, and L. Van Gool, “You’ll never walk alone: Modeling social behavior for multi-target tracking,” in Proc. IEEE Int. Conf. Comput. Vis. (ICCV). IEEE, 2009, pp. 261– 268
2009
-
[27]
Crowds by example,
A. Lerner, Y . Chrysanthou, and D. Lischinski, “Crowds by example,” inComput. Graph. Forum, vol. 26, no. 3. Wiley Online Library, 2007, pp. 655–664
2007
-
[28]
Jrdb: A dataset and benchmark of egocentric robot visual perception of humans in built environments,
R. Martin-Martin, M. Patel, H. Rezatofighi, A. Shenoi, J. Gwak, E. Frankel, A. Sadeghian, and S. Savarese, “Jrdb: A dataset and benchmark of egocentric robot visual perception of humans in built environments,”IEEE Trans. Pattern Anal. Mach. Intell., vol. 45, no. 6, pp. 6748–6765, 2021
2021
-
[29]
Socially compliant mobile robot navigation via inverse reinforcement learning,
H. Kretzschmar, M. Spies, C. Sprunk, and W. Burgard, “Socially compliant mobile robot navigation via inverse reinforcement learning,” Int. J. Robot. Res., vol. 35, no. 11, pp. 1289–1307, 2016
2016
-
[30]
Rethinking social robot navigation: Leveraging the best of two worlds,
A. H. Raj, Z. Hu, H. Karnan, R. Chandra, A. Payandeh, L. Mao, P. Stone, J. Biswas, and X. Xiao, “Rethinking social robot navigation: Leveraging the best of two worlds,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA). IEEE, 2024, pp. 16 330–16 337
2024
-
[31]
Crowd-robot interaction: Crowd-aware robot navigation with attention-based deep reinforce- ment learning,
C. Chen, Y . Liu, S. Kreiss, and A. Alahi, “Crowd-robot interaction: Crowd-aware robot navigation with attention-based deep reinforce- ment learning,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA). IEEE, 2019, pp. 6015–6022
2019
-
[32]
Sacson: Scalable autonomous control for social navigation,
N. Hirose, D. Shah, A. Sridhar, and S. Levine, “Sacson: Scalable autonomous control for social navigation,”IEEE Robot. Autom. Lett., vol. 9, no. 1, pp. 49–56, 2023
2023
-
[33]
Selfi: Autonomous self-improvement with reinforcement learning for social navigation,
N. Hirose, D. Shah, K. Stachowicz, A. Sridhar, and S. Levine, “Selfi: Autonomous self-improvement with reinforcement learning for social navigation,” inProc. Conf. Robot Learn. (CoRL). PMLR, 2024, p. TBD
2024
-
[34]
Spatiotemporal attention enhances lidar-based robot navigation in dynamic environments,
J. de Heuvel, X. Zeng, W. Shi, T. Sethuraman, and M. Bennewitz, “Spatiotemporal attention enhances lidar-based robot navigation in dynamic environments,”IEEE Robot. Autom. Lett., 2024
2024
-
[35]
J. Liang, U. Patel, A. J. Sathyamoorthy, and D. Manocha, “Realtime collision avoidance for mobile robots in dense crowds using implicit multi-sensor fusion and deep reinforcement learning,”arXiv preprint arXiv:2004.03089, 2020
-
[36]
Drl-vo: Learning to navigate through crowded dynamic scenes using velocity obstacles,
Z. Xie and P. Dames, “Drl-vo: Learning to navigate through crowded dynamic scenes using velocity obstacles,”IEEE Trans. Robot., vol. 39, no. 4, pp. 2700–2719, 2023
2023
-
[37]
Who knows who-inverting the social force model for finding groups,
J. ˇSochman and D. C. Hogg, “Who knows who-inverting the social force model for finding groups,” inProc. IEEE Int. Conf. Comput. Vis. Workshops (ICCVW). IEEE, 2011, pp. 830–837
2011
-
[38]
Improving data association by joint modeling of pedestrian trajectories and groupings,
S. Pellegrini, A. Ess, and L. Van Gool, “Improving data association by joint modeling of pedestrian trajectories and groupings,” inProc. Eur. Conf. Comput. Vis. (ECCV). Springer, 2010, pp. 452–465
2010
-
[39]
Probabilistic group-level motion analysis and scenario recognition,
M.-C. Chang, N. Krahnstoever, and W. Ge, “Probabilistic group-level motion analysis and scenario recognition,” inProc. IEEE Int. Conf. Comput. Vis. (ICCV). IEEE, 2011, pp. 747–754
2011
-
[40]
Social group discovery from surveillance videos: A data-driven approach with attention-based cues
I. Chamveha, Y . Sugano, Y . Sato, and A. Sugimoto, “Social group discovery from surveillance videos: A data-driven approach with attention-based cues.” inProc. Brit. Mach. Vis. Conf. (BMVC), 2013
2013
-
[41]
Detection of social groups in pedestrian crowds using computer vision,
S. D. Khan, G. Vizzari, S. Bandini, and S. Basalamah, “Detection of social groups in pedestrian crowds using computer vision,” inProc. Int. Conf. Adv. Concepts Intell. Vis. Syst. (ACIVS). Springer, 2015, pp. 249–260
2015
-
[42]
Real-time trajectory- based social group detection,
S. Jahangard, M. Hayat, and H. Rezatofighi, “Real-time trajectory- based social group detection,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2023, pp. 1901–1908
2023
-
[43]
Socially constrained structural learning for groups detection in crowd,
F. Solera, S. Calderara, and R. Cucchiara, “Socially constrained structural learning for groups detection in crowd,”IEEE Trans. Pattern Anal. Mach. Intell., vol. 38, no. 5, pp. 995–1008, 2015
2015
-
[44]
Robot-centric perception of human groups,
A. Taylor, D. M. Chan, and L. D. Riek, “Robot-centric perception of human groups,”ACM Trans. Hum.-Robot Interact., vol. 9, no. 3, pp. 1–21, 2020
2020
-
[45]
Performance of a low-cost, human- inspired perception approach for dense moving crowd navigation,
I. Chatterjee and A. Steinfeld, “Performance of a low-cost, human- inspired perception approach for dense moving crowd navigation,” in Proc. IEEE Int. Symp. Robot Hum. Interact. Commun. (RO-MAN). IEEE, 2016, pp. 578–585
2016
-
[46]
Dynamic-group-aware networks for multi-agent trajectory prediction with relational reasoning,
C. Xu, Y . Wei, B. Tang, S. Yin, Y . Zhang, S. Chen, and Y . Wang, “Dynamic-group-aware networks for multi-agent trajectory prediction with relational reasoning,”Neural Netw., vol. 170, pp. 564–577, 2024
2024
-
[47]
Learning pedestrian group representations for multi-modal trajectory prediction,
I. Bae, J.-H. Park, and H.-G. Jeon, “Learning pedestrian group representations for multi-modal trajectory prediction,” inProc. Eur. Conf. Comput. Vis. (ECCV). Springer, 2022, pp. 270–289
2022
-
[48]
The walking behaviour of pedestrian social groups and its impact on crowd dynamics,
M. Moussa ¨ıd, N. Perozo, S. Garnier, D. Helbing, and G. Theraulaz, “The walking behaviour of pedestrian social groups and its impact on crowd dynamics,”PLoS One, vol. 5, no. 4, p. e10047, 2010
2010
-
[49]
Social-aware navigation in crowds with static and dynamic groups,
F. Yang and C. Peters, “Social-aware navigation in crowds with static and dynamic groups,” inProc. Int. Conf. Virtual Worlds Games Serious Appl. (VS-Games). IEEE, 2019, pp. 1–4
2019
-
[50]
Vlm-social-nav: Socially aware robot navigation through scoring using vision-language models,
D. Song, J. Liang, A. Payandeh, A. H. Raj, X. Xiao, and D. Manocha, “Vlm-social-nav: Socially aware robot navigation through scoring using vision-language models,”IEEE Robot. Autom. Lett., 2024
2024
-
[51]
Comet: Modeling group cohesion for socially compliant robot navigation in crowded scenes,
A. J. Sathyamoorthy, U. Patel, M. Paul, N. K. S. Kumar, Y . Savle, and D. Manocha, “Comet: Modeling group cohesion for socially compliant robot navigation in crowded scenes,”IEEE Robot. Autom. Lett., vol. 7, no. 2, pp. 1008–1015, 2021
2021
-
[52]
Flow4d: Leveraging 4d voxel network for lidar scene flow estimation,
J. Kim, J. Woo, U. Shin, J. Oh, and S. Im, “Flow4d: Leveraging 4d voxel network for lidar scene flow estimation,”IEEE Robot. Autom. Lett., 2025
2025
-
[53]
A density-based algorithm for discovering clusters in large spatial databases with noise,
M. Ester, H.-P. Kriegel, J. Sander, and X. Xu, “A density-based algorithm for discovering clusters in large spatial databases with noise,” inProc. ACM SIGKDD Int. Conf. Knowl. Discov. Data Min. (KDD), 1996, pp. 226–231
1996
-
[54]
Social GAN: Socially acceptable trajectories with generative adversarial networks,
A. Gupta, J. Johnson, L. Fei-Fei, S. Savarese, and A. Alahi, “Social GAN: Socially acceptable trajectories with generative adversarial networks,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), 2018, pp. 2255–2264
2018
-
[55]
Sophie: An attentive gan for predicting paths compliant to social and physical constraints,
A. Sadeghian, V . Kosaraju, A. Sadeghian, N. Hirose, H. Rezatofighi, and S. Savarese, “Sophie: An attentive gan for predicting paths compliant to social and physical constraints,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), 2019, pp. 1349–1358
2019
-
[56]
From goals, way- points & paths to long term human trajectory forecasting,
K. Mangalam, Y . An, H. Girase, and J. Malik, “From goals, way- points & paths to long term human trajectory forecasting,” inProc. IEEE/CVF Int. Conf. Comput. Vis. (ICCV), 2021, pp. 15 233–15 242
2021
-
[57]
Agentformer: Agent- aware transformers for socio-temporal multi-agent forecasting,
Y . Yuan, X. Weng, Y . Ou, and K. M. Kitani, “Agentformer: Agent- aware transformers for socio-temporal multi-agent forecasting,” in Proc. IEEE/CVF Int. Conf. Comput. Vis. (ICCV), 2021, pp. 9813– 9823
2021
-
[58]
Moflow: One-step flow matching for human trajectory forecasting via implicit maximum likelihood estimation based distillation,
Y . Fu, Q. Yan, L. Wang, K. Li, and R. Liao, “Moflow: One-step flow matching for human trajectory forecasting via implicit maximum likelihood estimation based distillation,” inProc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), 2025, pp. 17 282–17 293
2025
-
[59]
From crowd motion prediction to robot navigation in crowds,
S. Poddar, C. Mavrogiannis, and S. S. Srinivasa, “From crowd motion prediction to robot navigation in crowds,” inProc. IEEE/RSJ Int. Conf. Intell. Robots Syst. (IROS). IEEE, 2023, pp. 6765–6772
2023
-
[60]
YOLOv4: Optimal Speed and Accuracy of Object Detection
A. Bochkovskiy, C.-Y . Wang, and H.-Y . M. Liao, “Yolov4: Op- timal speed and accuracy of object detection,”arXiv preprint arXiv:2004.10934, 2020
work page internal anchor Pith review arXiv 2004
-
[61]
Simple online and realtime tracking,
A. Bewley, Z. Ge, L. Ott, F. Ramos, and B. Upcroft, “Simple online and realtime tracking,” inProc. IEEE Int. Conf. Image Process. (ICIP). IEEE, 2016, pp. 3464–3468
2016
-
[62]
Observer-aware legibility for social navigation,
A. V . Taylor, E. Mamantov, and H. Admoni, “Observer-aware legibility for social navigation,” inProc. IEEE Int. Conf. Robot Human Interact. Commun. (RO-MAN). IEEE, 2022, pp. 1115–1122
2022
-
[63]
Social navigation with pedestrian groups,
A. Wang, “Social navigation with pedestrian groups,” Ph.D. disserta- tion, Carnegie Mellon Univ., 2023
2023
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.