Recognition: unknown
End-to-End ILC for Repetitive Untrackable Tasks: A Cooperative Game Perspective
Pith reviewed 2026-05-10 07:12 UTC · model grok-4.3
The pith
For untrackable repetitive tasks, jointly updating both reference and ILC feedforward input yields lower cost than standard norm-optimal ILC under a sufficient condition.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper discovers a sufficient condition under which the two-player end-to-end ILC has a lower cost than the one-player norm-optimal ILC for repetitive untrackable tasks. The reference input and the ILC feedforward input are updated simultaneously on the basis of measurement data, and the closed-loop dynamics are analyzed as a cooperative game in which the two updaters act as players with aligned objectives.
What carries the argument
The cooperative-game representation of the closed-loop ILC dynamics in which the reference updater and the feedforward updater are treated as players whose objectives are aligned.
Load-bearing premise
The closed-loop ILC dynamics admit a cooperative-game representation in which the reference updater and feedforward updater have aligned objectives, and the derived sufficient condition remains valid under real disturbances and model mismatch.
What would settle it
A simulation or experiment in which the stated sufficient condition holds yet the measured cost of the two-player end-to-end ILC exceeds that of the one-player norm-optimal ILC.
Figures


read the original abstract
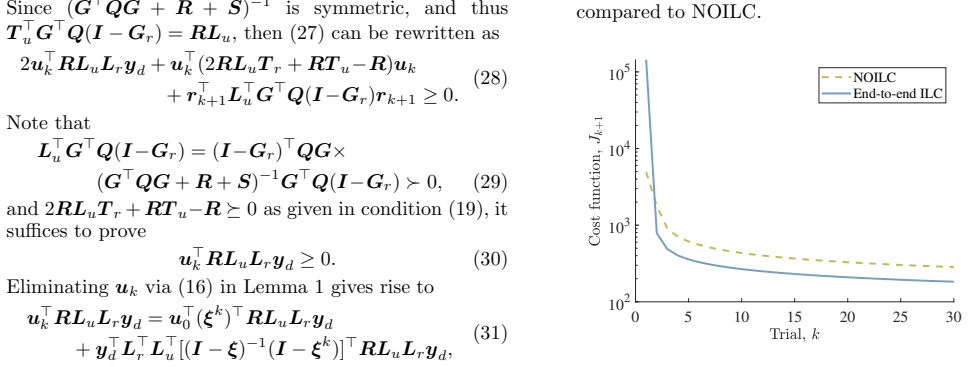
An inherent assumption of perfect tracking in iterative learning control (ILC) is that there exists an ILC input such that the generated output can track the desired trajectory reference. This assumption may fail in practice, which gives rise to desired but untrackable tasks. This paper gives an end-to-end ILC design for repetitive untrackable tasks in closed-loop systems. The reference input is trial-to-trial updated together with the ILC feedforward input based on the measurement data. This two-player behavior of the closed-loop ILC system is investigated from a cooperative game perspective. A sufficient condition for the two-player end-to-end ILC to have a lower cost than the one-player norm optimal ILC (NOILC) is discovered. Finally, a numerical example is given to verify the effectiveness of the developed method.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an end-to-end ILC design for repetitive untrackable tasks in closed-loop systems. Both the reference input and ILC feedforward input are updated trial-to-trial from measurement data. The closed-loop behavior is recast as a two-player cooperative game with aligned objectives, yielding a sufficient condition under which this two-player scheme achieves strictly lower cost than standard one-player norm-optimal ILC (NOILC). A numerical example is included to illustrate effectiveness.
Significance. If the sufficient condition is rigorously derived and the cooperative-game representation is faithful, the work supplies a principled way to handle untrackable references by jointly optimizing reference and feedforward updates. The game-theoretic framing is novel within ILC and could generalize to other multi-component learning schemes. The numerical example provides concrete verification under nominal conditions, which is a positive step toward reproducibility.
major comments (2)
- [Main Results / Cooperative Game Formulation] The derivation of the sufficient condition (presumably the central theorem in the main-results section) is presented under the standard ILC assumptions of perfect model knowledge and zero disturbances. The manuscript must explicitly state whether the inequality remains valid under bounded model mismatch or additive disturbances; if the proof relies on exact cancellation of the plant inverse, the condition is not load-bearing for practical untrackable tasks.
- [Numerical Example] The numerical example only demonstrates the nominal case. To support the claim that the two-player scheme outperforms NOILC, the example should include at least one run with realistic disturbances or parametric uncertainty and report the realized cost ratio relative to the derived sufficient-condition threshold.
minor comments (1)
- [Abstract / Problem Formulation] Notation for the two players' cost functions and the joint objective should be introduced once and used consistently; the current abstract leaves the precise definition of 'aligned objectives' implicit.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the major comments point by point below, agreeing to revisions that clarify the scope of the results and strengthen the numerical validation while preserving the nominal theoretical contribution.
read point-by-point responses
-
Referee: [Main Results / Cooperative Game Formulation] The derivation of the sufficient condition (presumably the central theorem in the main-results section) is presented under the standard ILC assumptions of perfect model knowledge and zero disturbances. The manuscript must explicitly state whether the inequality remains valid under bounded model mismatch or additive disturbances; if the proof relies on exact cancellation of the plant inverse, the condition is not load-bearing for practical untrackable tasks.
Authors: We agree that the sufficient condition is derived under the standard assumptions of perfect model knowledge and zero disturbances. The cooperative-game recasting and the proof of the cost inequality use the nominal lifted-system representation of the closed-loop dynamics; this does involve operations equivalent to the nominal plant inverse in the lifted domain. Consequently, we cannot assert that the inequality holds under bounded model mismatch or additive disturbances without further analysis. In the revised manuscript we will explicitly state these assumptions in the theorem and add a dedicated remark clarifying that the result is nominal, while noting that robustness extensions constitute future work. This accurately delimits the contribution without overstating its practical scope. revision: yes
-
Referee: [Numerical Example] The numerical example only demonstrates the nominal case. To support the claim that the two-player scheme outperforms NOILC, the example should include at least one run with realistic disturbances or parametric uncertainty and report the realized cost ratio relative to the derived sufficient-condition threshold.
Authors: We acknowledge that the present numerical example is confined to the nominal case. To address the concern, the revised manuscript will incorporate an additional simulation that includes bounded additive disturbances and parametric uncertainty. We will report the realized costs for both the proposed end-to-end ILC and standard NOILC, compute the cost ratio, and compare it against the threshold supplied by the sufficient condition. This will provide concrete evidence of relative performance beyond the ideal setting. revision: yes
Circularity Check
No circularity: sufficient condition derived from independent game reformulation
full rationale
The visible abstract and reader's summary indicate that the central result is a sufficient condition obtained after recasting closed-loop ILC dynamics as a cooperative game with aligned player objectives. No equations, fitted parameters, or self-citations are shown that would make the inequality hold by construction or reduce the prediction to the input data. The derivation therefore retains independent mathematical content under the stated nominal assumptions, consistent with a self-contained analysis.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The closed-loop ILC system admits a cooperative-game representation between reference updater and feedforward updater
Reference graph
Works this paper leans on
-
[1]
Amann, N., Owens, D.H., and Rogers, E. (1996). Iterative learning control for discrete-time systems with expo- nential rate of convergence. IEE Proceedings-Control Theory and Applications , 143(2), 217–224
1996
-
[2]
Arimoto, S., Kawamura, S., and Miyazaki, F. (1984). Bettering operation of robots by learning. Journal of Robotic Systems, 1(2), 123–140
1984
-
[3]
and Alleyne, A.G
Barton, K.L. and Alleyne, A.G. (2008). A cross-coupled iterative learning control design for precision motion control. IEEE Transactions on Control Systems Tech- nology, 16(6), 1218–1231
2008
-
[4]
Flepp, B., Goyal, P., Jackel, L.D., Monfort, M., Muller, U., Zhang, J., et al. (2016). End to end learning for self-driving cars. arXiv preprint arXiv:1604.07316
work page internal anchor Pith review arXiv 2016
-
[5]
and Oomen, T
Bolder, J. and Oomen, T. (2016). Inferential iterative learning control: A 2D-system approach. Automatica, 71, 247–253
2016
-
[6]
Bristow, D.A., Tharayil, M., and Alleyne, A.G. (2006). A survey of iterative learning control. IEEE Control Systems Magazine , 26(3), 96–114
2006
-
[7]
Cobb, M.K., Barton, K., Fathy, H., and Vermillion, C. (2019). Iterative learning-based path optimization for repetitive path planning, with application to 3-D cross- wind flight of airborne wind energy systems. IEEE Transactions on Control Systems Technology , 28(4), 1447–1459. de Roover, D. (1997). Motion control of a wafer stage: a design approach for sp...
2019
-
[8]
Freeman, C. (2016). Control system design for electrical stimulation in upper limb rehabilitation. Switzerland: Springer International Publishing
2016
-
[9]
and Norrl¨ of, M
Gunnarsson, S. and Norrl¨ of, M. (2001). On the design of ILC algorithms using optimization. Automatica, 37(12), 2011–2016
2001
-
[10]
Lambrechts, P., Boerlage, M., and Steinbuch, M. (2005). Trajectory planning and feedforward design for elec- tromechanical motion systems. Control Engineering Practice, 13(2), 145–157
2005
-
[11]
and Wu, Y
Meng, D. and Wu, Y. (2021). Control design for iterative methods in solving linear algebraic equations. IEEE Transactions on Automatic Control , 67(10), 5039–5054
2021
-
[12]
and Zhang, J
Meng, D. and Zhang, J. (2023). Fundamental trackability problems for iterative learning control. IEEE/CAA Journal of Automatica Sinica , 10(10), 1933–1950
2023
-
[13]
Mishra, S., Topcu, U., and Tomizuka, M. (2010). Optimization-based constrained iterative learning con- trol. IEEE Transactions on Control Systems Technol- ogy, 19(6), 1613–1621
2010
-
[14]
and Rojas, C.R
Oomen, T. and Rojas, C.R. (2017). Sparse iterative learn- ing control with application to a wafer stage: Achiev- ing performance, resource efficiency, and task flexibility. Mechatronics, 47, 134–147
2017
-
[15]
Owen, G. (2013). Game Theory. Emerald Group Publish- ing
2013
-
[16]
Shapley, L.S. (1971). Cores of convex games. International journal of game theory , 1(1), 11–26
1971
-
[17]
Harley, T., Dulac-Arnold, G., Reichert, D., Rabinowitz, N., Barreto, A., et al. (2017). The predictron: End-to- end learning and planning. In International Conference on Machine Learning , 3191–3199. PMLR
2017
-
[18]
Son, T.D., Ahn, H.S., and Moore, K.L. (2013). Iterative learning control in optimal tracking problems with spec- ified data points. Automatica, 49(5), 1465–1472. van Meer, M., Poot, M., Portegies, J., and Oomen, T. (2022). Gaussian process based feedforward control for nonlinear systems with flexible tasks: With application to a printer with friction. IF AC...
2013
-
[19]
Wang, C., Meng, D., and Wu, Y. (2024). Trackability compensation for iterative learning control: A data- based approach. In 2024 IEEE 63rd Conference on Decision and Control (CDC) , 4893–4898. IEEE
2024
-
[20]
and Meng, D
Wu, Y. and Meng, D. (2023). Data-based trackability cri- teria and control design for disturbed learning systems. Automatica, 155, 111113
2023
-
[21]
Zhang, Z., Jiang, H., Shen, D., and Saab, S.S. (2023). Data-driven learning control algorithms for unachiev- able tracking problems. IEEE/CAA Journal of Auto- matica Sinica, 11(1), 205–218
2023
-
[22]
Zhou, R., Hu, C., Wang, Z., Zhu, Y., and Tomizuka, M. (2024). Real-time iterative compensation control using plant-injection feedforward architecture with applica- tion to ultraprecision wafer stages. IEEE Transactions on Industrial Informatics
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.