Recognition: unknown
Web-Gewu: A Browser-Based Interactive Playground for Robot Reinforcement Learning
Pith reviewed 2026-05-10 06:19 UTC · model grok-4.3
The pith
A web browser can run full robot reinforcement learning by sending all physics and training to edge servers while the cloud only relays connections.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
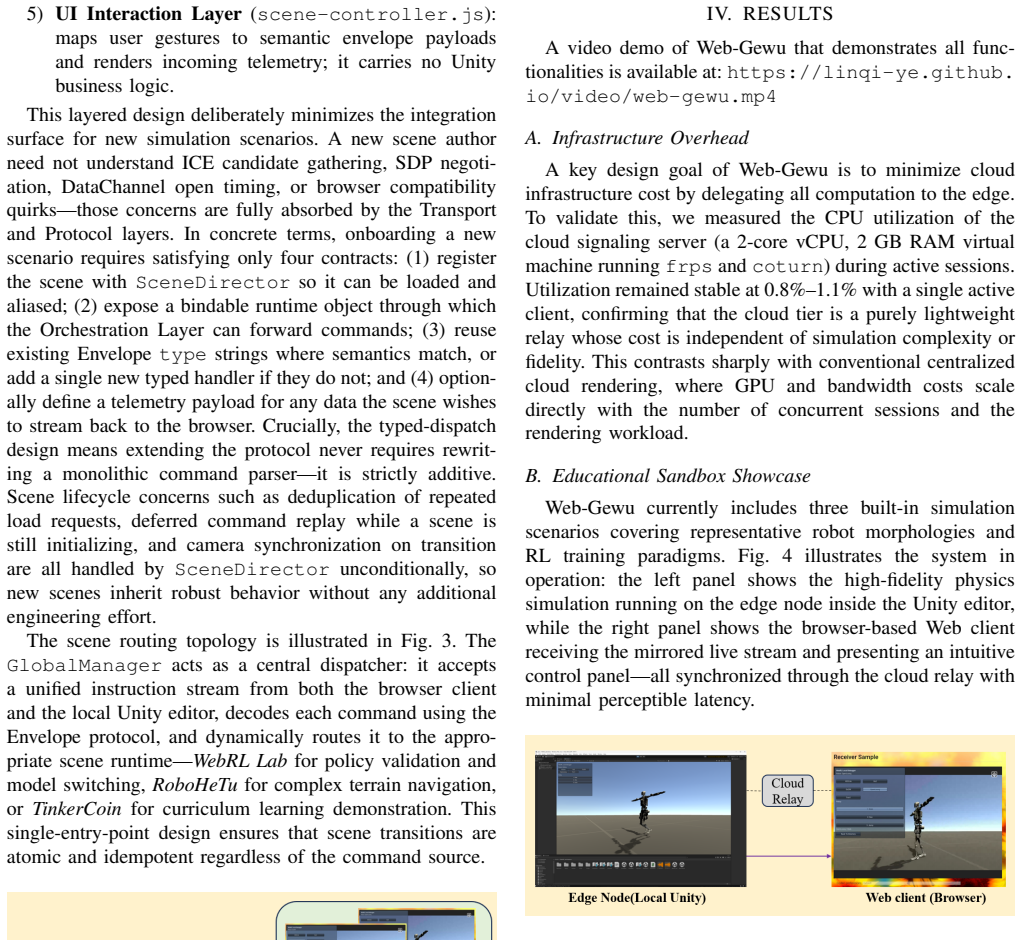
The paper claims that a WebRTC cloud-edge-client architecture offloads all physics simulation and reinforcement learning training to edge nodes, leaving the cloud server as a lightweight signaling relay only, which enables low-cost, browser-based peer-to-peer real-time streaming so users can interact with multi-form robots and monitor reward curves without any local installation.
What carries the argument
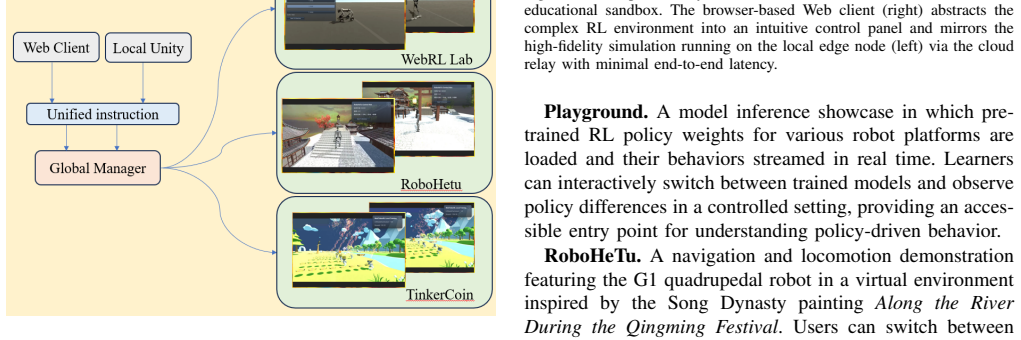
The WebRTC cloud-edge-client collaborative architecture that routes real-time control and visualization streams directly between browser and edge node through a minimal cloud relay.
If this is right
- Users gain direct browser access to interactive robot experiments without installing any software.
- Real-time multi-dimensional monitoring data, including reinforcement learning reward curves, appears live during training.
- The system supports a predefined command protocol that keeps communication reliable across sessions.
- Overall costs stay low because the cloud never performs heavy simulation or training work.
- The platform scales to many learners as an out-of-the-box teaching tool for embodied intelligence.
Where Pith is reading between the lines
- Similar edge-relay designs could extend to other browser-based scientific computing tasks that need real-time 3D views.
- If edge hardware becomes widely available, this pattern might reduce reliance on large central clouds for educational simulations.
- The approach could let classrooms share a single edge cluster for synchronized robot learning demos across locations.
Load-bearing premise
Edge nodes can run multiple simultaneous reinforcement learning training sessions while the WebRTC links keep end-to-end latency low enough for responsive robot control and live visualization.
What would settle it
Running several concurrent user sessions on the platform and checking whether training sessions crash or control latency exceeds roughly 100 milliseconds.
Figures



read the original abstract
With the rapid development of embodied intelligence, robotics education faces a dual challenge: high computational barriers and cumbersome environment configuration. Existing centralized cloud simulation solutions incur substantial GPU and bandwidth costs that preclude large-scale deployment, while pure local computing is severely constrained by learners' hardware limitations. To address these issues, we propose \href{http://47.76.242.88:8080/receiver/index.html}{Web-Gewu}, an interactive robotics education platform built on a WebRTC cloud-edge-client collaborative architecture. The system offloads all physics simulation and reinforcement learning (RL) training to the edge node, while the cloud server acts exclusively as a lightweight signaling relay, enabling extremely low-cost browser-based peer-to-peer (P2P) real-time streaming. Learners can interact with multi-form robots at low end-to-end latency directly in a web browser without any local installation, and simultaneously observe real-time visualization of multi-dimensional monitoring data, including reinforcement learning reward curves. Combined with a predefined robust command communication protocol, Web-Gewu provides a highly scalable, out-of-the-box, and barrier-free teaching infrastructure for embodied intelligence, significantly lowering the barrier to entry for cutting-edge robotics technology.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents Web-Gewu, a browser-based interactive platform for robot reinforcement learning education. It employs a WebRTC cloud-edge-client architecture in which all physics simulation and RL training are offloaded to edge nodes while the cloud server functions solely as a lightweight signaling relay, enabling low-latency P2P real-time streaming, multi-dimensional visualization, and interaction with multi-form robots directly in the browser without local installation or configuration.
Significance. If the performance claims are substantiated, the proposed architecture could meaningfully reduce computational and setup barriers for robotics education, offering a scalable alternative to centralized cloud solutions and local hardware constraints. The emphasis on edge offloading combined with WebRTC P2P streaming represents a practical direction for accessible embodied AI teaching tools.
major comments (2)
- Abstract and system architecture description: The central claims of 'extremely low-cost', 'low end-to-end latency', and 'highly scalable' operation are unsupported by any quantitative evidence. No latency distributions, per-session resource usage (CPU/GPU), maximum concurrent training sessions, or comparisons against baselines are reported, leaving the load-bearing assertions about edge-node capacity and interactive performance unverified.
- The description of the 'predefined robust command communication protocol' and its integration with RL training and visualization lacks sufficient technical detail to evaluate robustness, latency impact, or correctness under concurrent use.
Simulated Author's Rebuttal
We thank the referee for their detailed review and constructive suggestions. We agree with the identified shortcomings in the current manuscript regarding quantitative evidence and technical details, and we outline our plans for revision below.
read point-by-point responses
-
Referee: Abstract and system architecture description: The central claims of 'extremely low-cost', 'low end-to-end latency', and 'highly scalable' operation are unsupported by any quantitative evidence. No latency distributions, per-session resource usage (CPU/GPU), maximum concurrent training sessions, or comparisons against baselines are reported, leaving the load-bearing assertions about edge-node capacity and interactive performance unverified.
Authors: We concur that the manuscript currently lacks the quantitative data necessary to substantiate these performance claims. In the revised version, we will add a new section or subsection presenting experimental evaluations, including measurements of end-to-end latency (with distributions), CPU and GPU usage per session on the edge nodes, the maximum number of concurrent training sessions supported, and comparisons to baseline centralized cloud solutions. These additions will provide the necessary evidence for the claims of low cost, low latency, and scalability. revision: yes
-
Referee: The description of the 'predefined robust command communication protocol' and its integration with RL training and visualization lacks sufficient technical detail to evaluate robustness, latency impact, or correctness under concurrent use.
Authors: We agree that additional technical details on the command communication protocol are required. The revised manuscript will expand the description to include the protocol's specification, such as message structures, sequencing, error recovery mechanisms, and its integration points with the RL training process and the visualization pipeline. We will also include analysis of its impact on latency and behavior under concurrent sessions based on our implementation experience. revision: yes
Circularity Check
No circularity: purely descriptive system architecture with no derivations or self-referential claims
full rationale
The paper describes a WebRTC-based cloud-edge-client architecture for browser-based robot RL, with the cloud limited to signaling and edge nodes handling simulation/training. No equations, fitted parameters, predictions, uniqueness theorems, or self-citations appear in the abstract or described content. The central claims are architectural assertions about latency and scalability that do not reduce to any input by construction or self-reference; they are presented as design choices without load-bearing derivations. This matches the expected non-circular outcome for a systems paper.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning
M. Mittal et al., “Isaac Lab: A GPU-Accelerated Simulation Framework for Multi-Modal Robot Learning,”arXiv preprint arXiv:2511.04831, 2025
work page internal anchor Pith review arXiv 2025
-
[2]
mjlab: A Lightweight Framework for GPU-Accelerated Robot Learn- ing,
K. Zakka, Q. Liao, B. Yi, L. L. Lay, K. Sreenath, and P. Abbeel, “mjlab: A Lightweight Framework for GPU-Accelerated Robot Learn- ing,”arXiv preprint arXiv:2601.22074, 2026
-
[3]
Gewu Playground: An Open-Source Robot Simulation Platform for Embodied Intelli- gence Research,
L. Ye, B. Xing, B. Liang, L. Jiang, and Y . Peng, “Gewu Playground: An Open-Source Robot Simulation Platform for Embodied Intelli- gence Research,”Sci. China Technol. Sci., 2026, doi: 10.1007/s11431- 025-3253-2
-
[4]
Real-time communication testing evo- lution with WebRTC 1.0,
A. Gouaillard and L. Roux, “Real-time communication testing evo- lution with WebRTC 1.0,” inProc. 2017 Princ., Syst. Appl. IP Telecommun. (IPTComm), 2017, pp. 1–8
2017
-
[5]
D. Smilkov, S. Carter, D. Sculley, F. B. Vi ´egas, and M. Wattenberg, “Direct-Manipulation Visualization of Deep Networks,”CoRR, vol. abs/1708.03788, 2017
-
[6]
Reinforcement Learning Playground,
A. Lazareva, “Reinforcement Learning Playground,” [Online]. Avail- able:https://alazareva.github.io/rl_playground/, accessed Apr. 18, 2026
2026
-
[7]
Interactive Deep Reinforcement Learning Demo,
P. Germon, C. Romac, R. Portelas, and P.-Y . Oudeyer, “Interactive Deep Reinforcement Learning Demo,” [Online]. Available: https://developmentalsystems.org/Interactive_ DeepRL_Demo/, accessed 2021
2021
-
[8]
Cyberbotics Ltd. Webots™: Professional Mobile Robot Simulation,
O. Michel, “Cyberbotics Ltd. Webots™: Professional Mobile Robot Simulation,”Int. J. Adv. Robot. Syst., vol. 1, no. 1, pp. 39–42, 2004
2004
-
[9]
Design and Use Paradigms for Gazebo, an Open-Source Multi-Robot Simulator,
N. Koenig and A. Howard, “Design and Use Paradigms for Gazebo, an Open-Source Multi-Robot Simulator,” inProc. IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS), 2004, pp. 2149–2154
2004
-
[10]
Unity ml-agents,
A. Nandy and M. Biswas, “Unity ml-agents,” inNeural Networks in Unity: C# Programming for Windows 10, Springer, 2018, pp. 27–67
2018
-
[11]
Deep reinforcement learning in agents’ training: Unity ML-agents,
L. Alm ´on-Manzano, R. Pastor-Vargas, and J. M. C. Troncoso, “Deep reinforcement learning in agents’ training: Unity ML-agents,” inProc. Int. Work-Conf. Interplay Natural Artif. Comput., Springer, 2022, pp. 391–400
2022
-
[12]
AMP: Adversarial Motion Priors for Stylized Physics-Based Character Con- trol,
X. B. Peng, Z. Ma, P. Abbeel, S. Levine, and A. Kanazawa, “AMP: Adversarial Motion Priors for Stylized Physics-Based Character Con- trol,”ACM Trans. Graph., vol. 40, no. 4, Jul. 2021
2021
-
[13]
WebRTC 1.0: Real-Time Communi- cation Between Browsers,
A. Bergkvist, D. Burnett, C. Jennings, A. Narayanan, B. Aboba, T. Brandstetter, and J. I. Bruaroey, “WebRTC 1.0: Real-Time Communi- cation Between Browsers,” W3C Recommendation, Jan. 2021
2021
-
[14]
HoST: Learning humanoid standing-up control across diverse postures,
T. Huanget al., “Learning Humanoid Standing-up Control across Diverse Postures,”arXiv preprint arXiv:2502.08378, 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.