Recognition: unknown
Driving risk emerges from the required two-dimensional joint evasive acceleration
Pith reviewed 2026-05-10 04:56 UTC · model grok-4.3
The pith
Driving risk is the minimum constant relative acceleration needed in any direction to prevent a collision.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
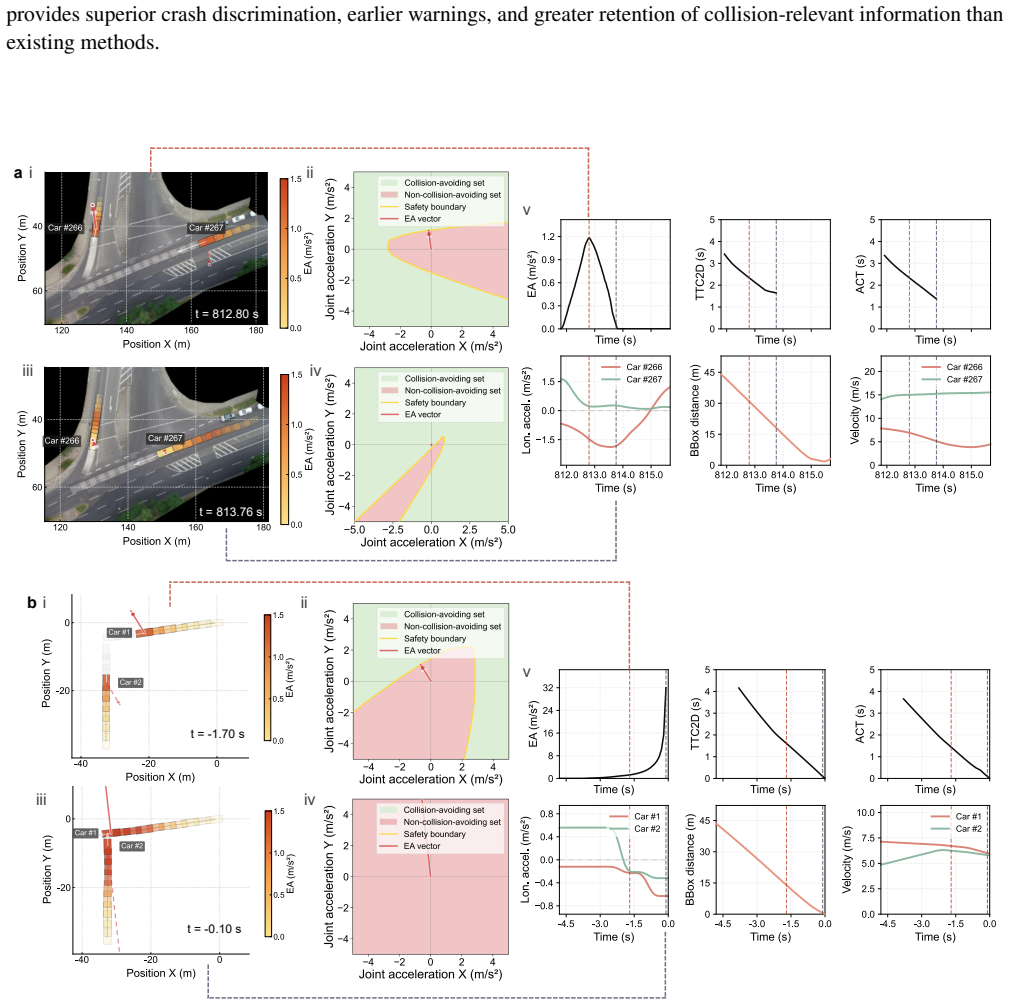
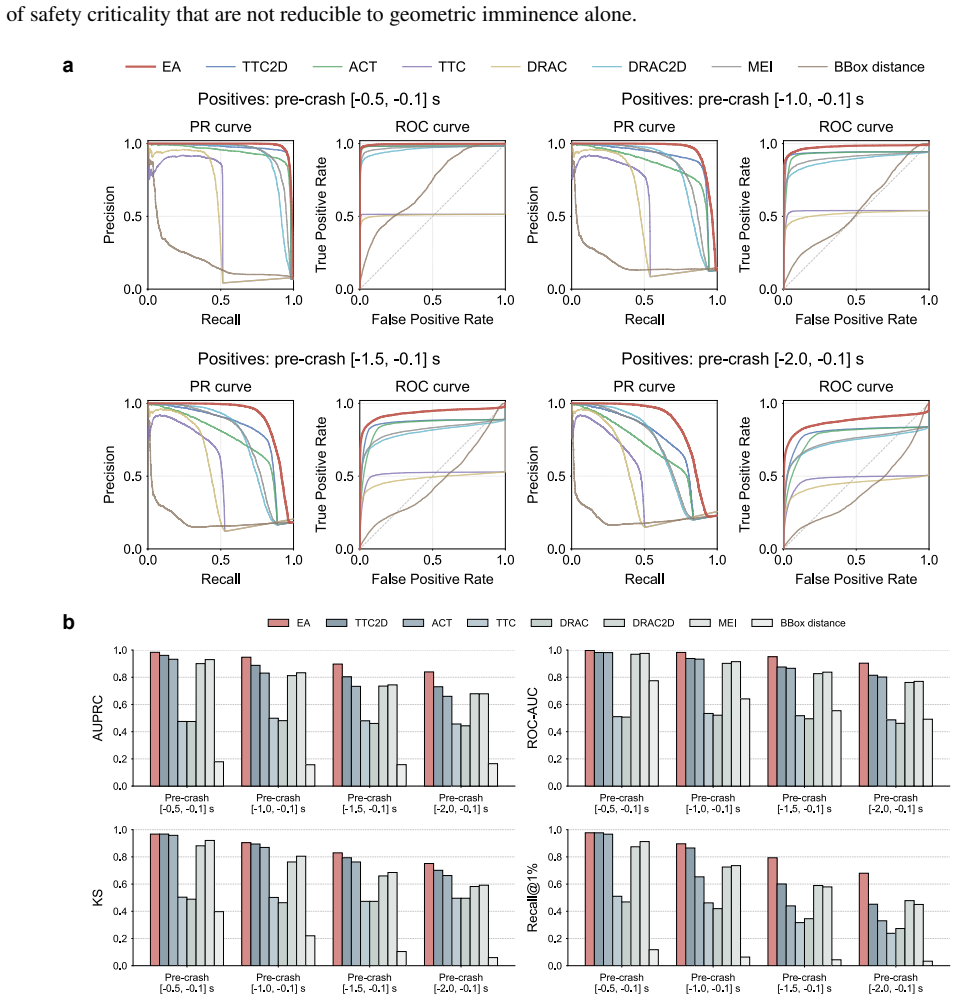
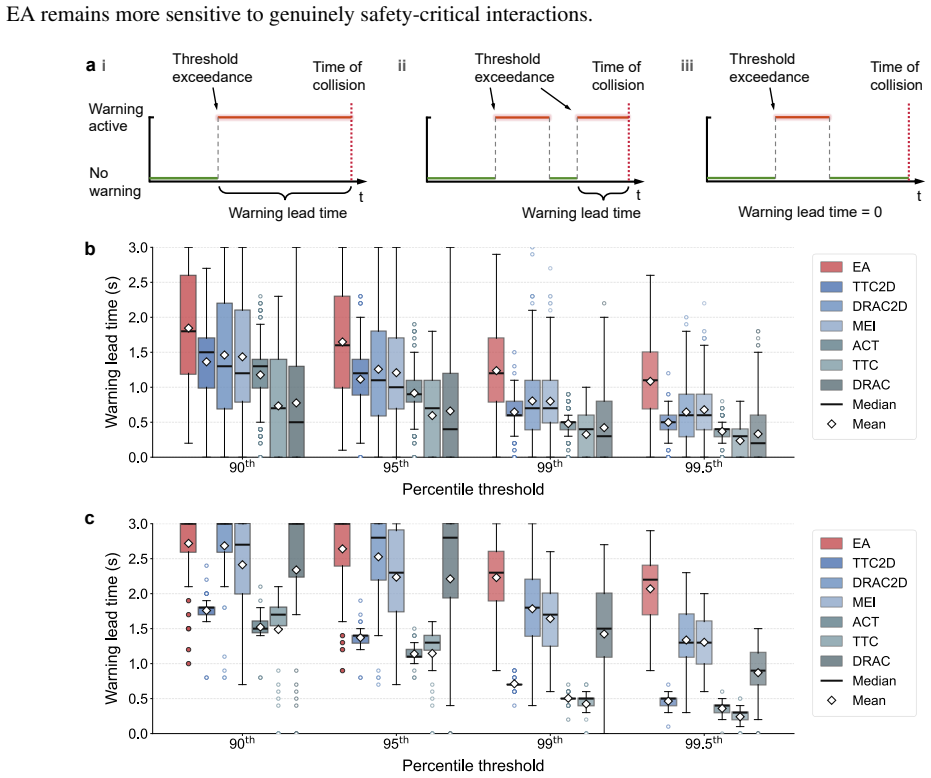
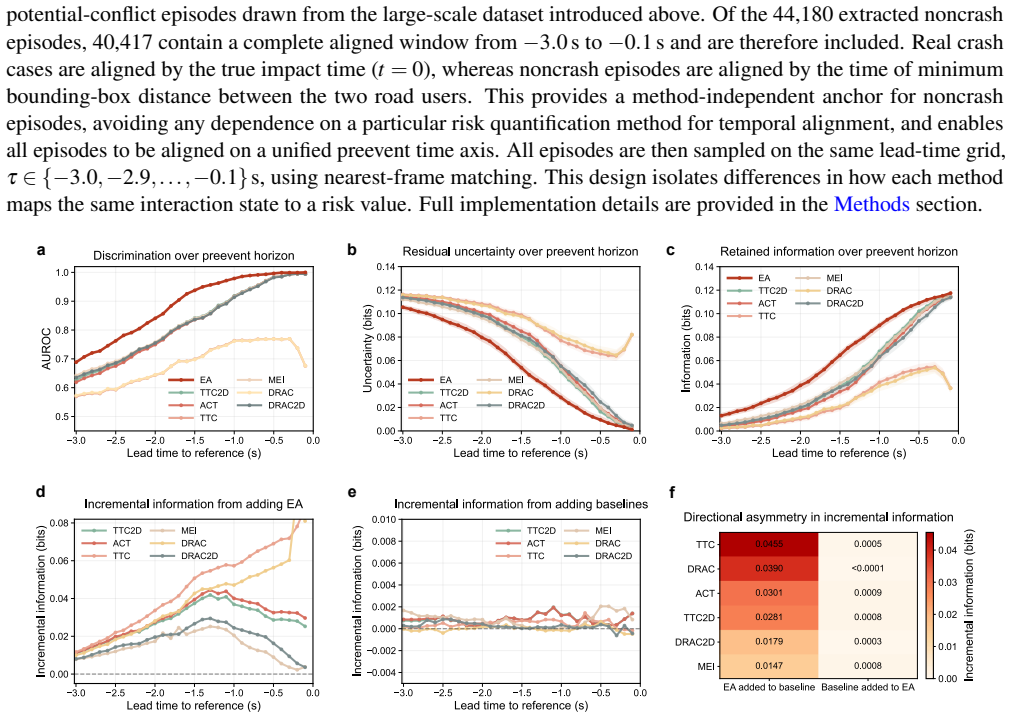
Evasive acceleration defines risk as the minimum magnitude of a constant relative acceleration vector, evaluated over all possible directions, that is required to alter the relative motion and ensure the interaction remains collision-free. This two-dimensional formulation captures the joint evasive actions of both vehicles. When applied to interaction data from five open datasets and over 600 real crashes, percentile thresholds derived from it trigger the earliest statistically significant warnings, achieve superior discrimination between collision and non-collision outcomes, and retain 54.2-241.4 percent more information than baseline methods.
What carries the argument
Evasive acceleration: the minimum magnitude of a constant relative acceleration vector required to achieve collision-free motion, obtained by testing all possible avoidance directions.
If this is right
- EA provides the earliest statistically significant warning across all tested thresholds.
- EA achieves the best discrimination between eventual collision and non-collision outcomes.
- Information retention improves by 54.2-241.4 percent over all compared baselines.
- Adding EA to existing methods produces 17.5-95.5 times more information gain than adding existing methods to EA.
- EA captures most outcome-relevant information already present in baselines while contributing substantial nonredundant content.
Where Pith is reading between the lines
- Vehicle planners could optimize trajectories by minimizing evasive acceleration directly rather than by satisfying separate time-to-collision thresholds.
- In dense multi-agent scenes the maximum pairwise EA could serve as a single scalar risk signal for priority decisions.
- The constant-acceleration model could be relaxed to linear or piecewise acceleration profiles to test whether risk estimates improve in high-curvature or braking scenarios.
Load-bearing premise
That the smallest constant relative acceleration sufficient to clear a collision in the optimal direction accurately represents real-world risk where accelerations vary over time and multiple agents interact.
What would settle it
In a large set of real crashes, EA-based warnings do not occur statistically earlier or discriminate outcomes better than time-to-collision warnings at matched thresholds.
Figures

read the original abstract
Most autonomous driving safety benchmarks use time-to-collision (TTC) to assess risk and guide safe behaviour. However, TTC-based methods treat risk as a one-dimensional closing problem, despite the inherently two-dimensional nature of collision avoidance, and therefore cannot faithfully capture risk or its evolution over time. Here, we report evasive acceleration (EA), a hyperparameter-free and physically interpretable two-dimensional paradigm for risk quantification. By evaluating all possible directions of collision avoidance, EA defines risk as the minimum magnitude of a constant relative acceleration vector required to alter the relative motion and make the interaction collision-free. Using interaction data from five open datasets and more than 600 real crashes, we derive percentile-based warning thresholds and show that EA provides the earliest statistically significant warning across all thresholds. Moreover, EA provides the best discrimination of eventual collision outcomes and improves information retention by 54.2-241.4% over all compared baselines. Adding EA to existing methods yields 17.5-95.5 times more information gain than adding existing methods to EA, indicating that EA captures much of the outcome-relevant information in existing methods while contributing substantial additional nonredundant information. Overall, EA better captures the structure of collision risk and provides a foundation for next-generation autonomous driving systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces evasive acceleration (EA) as a two-dimensional risk metric for driving interactions. EA is defined as the smallest magnitude of a constant relative acceleration vector, applied in an optimal direction, that ensures no collision occurs between agents over the time horizon. The authors evaluate EA using data from five open datasets and more than 600 real-world crashes, deriving percentile-based warning thresholds. They claim that EA provides the earliest statistically significant warnings, best discriminates collision outcomes, improves information retention by 54.2-241.4% over baselines, and adds substantial non-redundant information when combined with existing methods.
Significance. If the central modeling assumptions hold, this work provides a physically grounded alternative to one-dimensional metrics like TTC, with empirical support from real crash data demonstrating improved predictive power and information content. The use of multiple datasets and crash records strengthens the empirical claims. The hyperparameter-free construction and direct use of relative motion principles are notable strengths.
major comments (2)
- [§3] §3 (EA definition): EA is constructed as the minimum scalar magnitude of a constant relative acceleration vector that produces a collision-free trajectory. This modeling choice implicitly assumes that a single fixed acceleration suffices over the full horizon; it does not address cases where optimal evasion requires time-varying acceleration (e.g., initial braking then steering) or responses to additional agents. Because the percentile thresholds, discrimination results, and 54.2–241.4% information-retention gains rest directly on this scalar proxy, the reported superiority over baselines could be sensitive to the constant-acceleration restriction.
- [Results] Results section (information-gain and threshold analysis): The claims that EA yields 17.5–95.5× more incremental information gain and provides the earliest statistically significant warning across thresholds require explicit reporting of the exact statistical procedure (e.g., which test, degrees of freedom, multiple-comparison correction) and the per-dataset sample sizes at each percentile. Without these, it is difficult to assess whether the numerical improvements are robust or partly artifacts of the constant-acceleration modeling choice.
minor comments (2)
- [Abstract] Abstract and §3: The phrase 'hyperparameter-free' is used, yet practical computation of EA necessarily involves discretization of direction and time; these choices should be stated explicitly as implementation parameters even if they do not appear in the final scalar value.
- [§3] Notation: The relative acceleration vector and the occupied-region intersection test are central; a compact equation or pseudocode block early in §3 would improve readability for readers unfamiliar with the exact geometric formulation.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments, which have helped us clarify key aspects of the work. We address each major comment below and have revised the manuscript to strengthen the presentation of our modeling choices and statistical reporting.
read point-by-point responses
-
Referee: [§3] §3 (EA definition): EA is constructed as the minimum scalar magnitude of a constant relative acceleration vector that produces a collision-free trajectory. This modeling choice implicitly assumes that a single fixed acceleration suffices over the full horizon; it does not address cases where optimal evasion requires time-varying acceleration (e.g., initial braking then steering) or responses to additional agents. Because the percentile thresholds, discrimination results, and 54.2–241.4% information-retention gains rest directly on this scalar proxy, the reported superiority over baselines could be sensitive to the constant-acceleration restriction.
Authors: The constant-acceleration formulation is a deliberate modeling choice that yields a hyperparameter-free, physically interpretable metric representing the minimum fixed relative acceleration needed to ensure collision-free trajectories. This aligns with the paper's emphasis on a simple, two-dimensional risk measure grounded in relative motion. While we acknowledge that time-varying accelerations or multi-agent responses may be optimal in some scenarios, the empirical evaluation across five open datasets and over 600 real crashes shows consistent superiority in warning timing, discrimination, and information retention. To address the concern directly, we have added a dedicated limitations paragraph in §3 explaining the rationale for the constant-acceleration assumption, noting its conservative nature for short-horizon interactions, and outlining potential extensions to time-varying or multi-agent cases. This is a partial revision. revision: partial
-
Referee: [Results] Results section (information-gain and threshold analysis): The claims that EA yields 17.5–95.5× more incremental information gain and provides the earliest statistically significant warning across thresholds require explicit reporting of the exact statistical procedure (e.g., which test, degrees of freedom, multiple-comparison correction) and the per-dataset sample sizes at each percentile. Without these, it is difficult to assess whether the numerical improvements are robust or partly artifacts of the constant-acceleration modeling choice.
Authors: We agree that full transparency in statistical methods is necessary for assessing robustness. In the revised manuscript, we have expanded the Results section to explicitly describe the statistical procedures (paired Wilcoxon signed-rank tests with Bonferroni correction for multiple thresholds, with degrees of freedom and p-value thresholds reported), and we now include per-dataset sample sizes at each percentile level for all analyses. These details confirm that the reported gains in information retention and earlier warnings are consistent across independent datasets and not artifacts of the modeling choice. This is a full revision. revision: yes
Circularity Check
No circularity: EA defined from kinematics and validated empirically on external data
full rationale
The paper defines EA directly as the minimum-magnitude constant relative acceleration vector that renders an interaction collision-free, obtained by exhaustive search over directions in the two-dimensional relative-motion plane. This construction follows from standard relative kinematics and does not presuppose any fitted parameter or outcome label that is later re-predicted. Percentile thresholds are computed once from the empirical distribution on five open datasets; discrimination, information-retention, and incremental-gain statistics are then obtained by applying those fixed thresholds to held-out crash records and comparing against independent baselines. No equation reduces to its own input by construction, no self-citation supplies a load-bearing uniqueness theorem, and no ansatz is smuggled in. The modeling choice of constant acceleration is an explicit assumption whose fidelity can be tested externally; it does not create a definitional loop.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Collision risk can be quantified by the minimum constant relative acceleration vector that alters motion to collision-free state.
invented entities (1)
-
Evasive acceleration (EA)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Feng, S.et al.Breaking through safety performance stagnation in autonomous vehicles with dense learning. Nat. Commun.(2026)
2026
-
[2]
& Abbink, D
Kolekar, S., De Winter, J. & Abbink, D. Human-like driving behaviour emerges from a risk-based driver model. Nat. communications11, 4850 (2020)
2020
-
[3]
Feng, S.et al.Dense reinforcement learning for safety validation of autonomous vehicles.Nature615, 620–627 (2023)
2023
-
[4]
& Guo, F
Qian, C., Xu, J., Xing, X. & Guo, F. Test case sampling optimization for safety validation of automated driving systems.Nat. Commun.(2026)
2026
-
[5]
& Chitta, K
Dauner, D., Hallgarten, M., Geiger, A. & Chitta, K. Parting with misconceptions about learning-based vehicle motion planning. InConference on Robot Learning, 1268–1281 (PMLR, 2023)
2023
-
[6]
Neural Inf
Dauner, D.et al.Navsim: Data-driven non-reactive autonomous vehicle simulation and benchmarking.Adv. Neural Inf. Process. Syst.37, 28706–28719 (2024)
2024
-
[7]
InConference on Robot Learning, 4709–4722 (PMLR, 2025)
Cao, W.et al.Pseudo-simulation for autonomous driving. InConference on Robot Learning, 4709–4722 (PMLR, 2025)
2025
-
[8]
Liu, H. X.et al.Behavioral safety assessment towards large-scale deployment of autonomous vehicles.arXiv preprint arXiv:2505.16214(2025)
- [9]
-
[10]
& Wang, S
Fan, Y ., Li, Y . & Wang, S. Risk-aware self-consistent imitation learning for trajectory planning in autonomous driving. InEuropean Conference on Computer Vision, 270–287 (Springer, 2024)
2024
- [11]
-
[12]
Li, Z.et al.Hydra-mdp: End-to-end multimodal planning with multi-target hydra-distillation.arXiv preprint arXiv:2406.06978(2024)
work page internal anchor Pith review arXiv 2024
- [13]
- [14]
-
[15]
Song, Z.et al.Diver: Reinforced diffusion breaks imitation bottlenecks in end-to-end autonomous driving. arXiv preprint arXiv:2507.04049(2025)
work page internal anchor Pith review arXiv 2025
-
[16]
Reddy, R., Barua, H. B., Loo, J. Y ., Nguyen, T. T. & Krishnasamy, G. Rapid: Real-time deterministic trajectory planning via diffusion behavior priors for safe and efficient autonomous driving.arXiv preprint arXiv:2602.07339(2026). 17.Yang, Z.et al.Read: End-to-end autonomous driving made safer with efficient reinforcement learning (2025). Preprint
-
[17]
Li, H.et al.Plannerrft: Reinforcing diffusion planners through closed-loop and sample-efficient fine-tuning. arXiv preprint arXiv:2601.12901(2026)
- [18]
- [19]
-
[20]
& Den Camp, O
de Gelder, E. & Den Camp, O. O. Scenario-based assessment of automated driving systems: How (not) to parameterize scenarios? In2024 IEEE International Automated Vehicle Validation Conference (IAVVC), 1–7 (IEEE, 2024)
2024
-
[21]
& Bärgman, J
Olleja, P., Markkula, G. & Bärgman, J. Validation of human benchmark models for automated driving system approval: How competent and careful are they really?Accid. Analysis & Prev.213, 107922 (2025)
2025
-
[22]
& Dozza, M
Rasch, A., Panero, G., Boda, C.-N. & Dozza, M. How do drivers overtake pedestrians? evidence from field test and naturalistic driving data.Accid. Analysis & Prev.139, 105494 (2020)
2020
-
[23]
E.et al.Indicators of driver adaptation to forward collision warnings: A naturalistic driving evaluation (2019)
Nodine, E. E.et al.Indicators of driver adaptation to forward collision warnings: A naturalistic driving evaluation (2019). Source bibliography lacked journal information
2019
-
[24]
B., den Camp Olaf, O.et al.Scenario metrics for the safety assurance framework of automated vehicles: A review of its application.Vehicles7, 100 (2025)
Singh, T., Fouad, H.-S., Sergi, V . B., den Camp Olaf, O.et al.Scenario metrics for the safety assurance framework of automated vehicles: A review of its application.Vehicles7, 100 (2025)
2025
-
[25]
Venthuruthiyil, S. P. & Chunchu, M. Anticipated collision time (act): A two-dimensional surrogate safety indicator for trajectory-based proactive safety assessment.Transp. research part C: emerging technologies139, 103655 (2022)
2022
-
[26]
& Keyvan-Ekbatani, M
Guo, H., Xie, K. & Keyvan-Ekbatani, M. Modeling driver’s evasive behavior during safety–critical lane changes: Two-dimensional time-to-collision and deep reinforcement learning.Accid. Analysis & Prev.186, 107063 (2023)
2023
-
[27]
Mathematics12, 1905 (2024)
Fu, X.et al.Research on vehicle aeb control strategy based on safety time–safety distance fusion algorithm. Mathematics12, 1905 (2024)
1905
-
[28]
& Chen, K
Wang, Y ., Li, Z., Liu, P., Xu, C. & Chen, K. Surrogate safety measures for traffic oscillations based on empirical vehicle trajectories prior to crashes.Transp. research part C: emerging technologies161, 104543 (2024)
2024
-
[29]
& Liu, Y .-C
Jafari, A. & Liu, Y .-C. Pedestrians’ safety using projected time-to-collision to electric scooters.Nat. communi- cations15, 5701 (2024)
2024
-
[30]
& Aramrattana, M
Behera, A., Kharrazi, S., Frisk, E. & Aramrattana, M. An improved 2d time-to-collision for articulated vehicles: predicting sideswipe and rear-end collisions.arXiv e-printsarXiv–2507 (2025)
2025
-
[31]
& Yeo, H
Lin, T., Jin, Z., Choi, S. & Yeo, H. Predicted lane-based time to collision: A novel surrogate safety measure for pedestrian potential risk evaluation at non-signalized intersections.Transp. Res. Interdiscip. Perspectives34, 101705 (2025)
2025
-
[32]
Tang, F., Liu, Z., Wang, Z. & Li, N. Analysis of traffic conflict characteristics and key factors influencing severity in expressway interchange diverging areas: Insights from a chinese freeway safety study.Sustainability 17, 8419 (2025)
2025
-
[33]
J., Flannagan, C
Yan, X., Feng, S., LeBlanc, D. J., Flannagan, C. & Liu, H. X. Evaluation of automated driving system safety metrics with logged vehicle trajectory data.IEEE Transactions on Intell. Transp. Syst.25, 8913–8925 (2024)
2024
-
[34]
& Kim, S
Choi, J. & Kim, S. Predictive risk-aware reinforcement learning for autonomous vehicles using safety potential. Electronics14, 4446 (2025)
2025
-
[35]
Biswas, A., Gideon, J., Tamura, K. & Rosman, G. Modeling drivers’ risk perception via attention to improve driving assistance.arXiv preprint arXiv:2409.04738(2024)
-
[36]
Wu, K.et al.Ai2-active safety: Ai-enabled interaction-aware active safety analysis with vehicle dynamics. arXiv preprint arXiv:2505.00322(2025)
-
[37]
& Yang, S
Lu, D., Du, H., Wu, Z. & Yang, S. Risk assessment in autonomous driving: a comprehensive survey of risk sources, methodologies, and system architectures.Auton. Intell. Syst.5, 24 (2025)
2025
-
[38]
Diwakar, P., Landge, V . S. & Jain, U. Evaluating the relationship between surrogate safety measures and traffic event severity in terms of human perception of danger: A perspective under indian traffic conditions.Appl. Sci. 13, 12100 (2023). 20/23
2023
-
[39]
& Miranda-Moreno, L
Do, W., Saunier, N. & Miranda-Moreno, L. Evaluation of conventional surrogate indicators of safety for connected and automated vehicles in car following at signalized intersections.Transp. Res. Rec.2679, 1118– 1133 (2025)
2025
-
[40]
& Abdulhai, B
ElSamadisy, O., Shi, T., Smirnov, I. & Abdulhai, B. Safe, efficient, and comfortable reinforcement-learning- based car-following for avs with an analytic safety guarantee and dynamic target speed.Transp. research record 2678, 643–661 (2024)
2024
-
[41]
Westhofen, L.et al.Criticality metrics for automated driving: A review and suitability analysis of the state of the art.Arch. Comput. Methods Eng.30, 1–35 (2023)
2023
-
[42]
Analysis & Prev
Zhou, R.et al.How would autonomous vehicles behave in real-world crash scenarios?Accid. Analysis & Prev. 202, 107572 (2024)
2024
-
[43]
& Bian, J
Zhou, R., Huang, H., Zhang, G., Zhou, H. & Bian, J. Crash-based safety testing of autonomous vehicles: Insights from generating safety-critical scenarios based on in-depth crash data.IEEE Transactions on Intell. Transp. Syst.(2025)
2025
-
[44]
& Meng, X
Zheng, L., Ismail, K. & Meng, X. Traffic conflict techniques for road safety analysis: open questions and some insights.Can. journal civil engineering41, 633–641 (2014)
2014
-
[45]
& De Ceunynck, T
Johnsson, C., Laureshyn, A. & De Ceunynck, T. In search of surrogate safety indicators for vulnerable road users: a review of surrogate safety indicators.Transp. reviews38, 765–785 (2018)
2018
-
[46]
R., Rao, K
Sarkar, D. R., Rao, K. R. & Chatterjee, N. A review of surrogate safety measures on road safety at unsignalized intersections in developing countries.Accid. Analysis & Prev.195, 107380 (2024)
2024
-
[47]
& Eckstein, L
Krajewski, R., Bock, J., Kloeker, L. & Eckstein, L. The highd dataset: A drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems. In2018 21st international conference on intelligent transportation systems (ITSC), 2118–2125 (IEEE, 2018)
2018
-
[48]
In2022 IEEE Intelligent Vehicles Symposium (IV), 958–964 (IEEE, 2022)
Moers, T.et al.The exid dataset: A real-world trajectory dataset of highly interactive highway scenarios in germany. In2022 IEEE Intelligent Vehicles Symposium (IV), 958–964 (IEEE, 2022)
2022
-
[49]
In 2020 IEEE Intelligent Vehicles Symposium (IV), 1929–1934 (IEEE, 2020)
Bock, J.et al.The ind dataset: A drone dataset of naturalistic road user trajectories at german intersections. In 2020 IEEE Intelligent Vehicles Symposium (IV), 1929–1934 (IEEE, 2020)
2020
-
[50]
In2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), 2471–2478 (IEEE, 2022)
Xu, Y .et al.Sind: A drone dataset at signalized intersection in china. In2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), 2471–2478 (IEEE, 2022)
2022
-
[51]
Li, G., Jiao, Y ., Calvert, S. C. & van Lint, J. H. Lateral conflict resolution data derived from argoverse-2: Analysing safety and efficiency impacts of autonomous vehicles at intersections.Transp. Res. Part C: Emerg. Technol.167, 104802 (2024)
2024
-
[52]
& Risser, R
Almqvist, S., Hyden, C. & Risser, R. Use of speed limiters in cars for increased safety and a better environment. Transp. Res. Rec.(1991). 54.Jiao, Y . A fast calculation of two-dimensional time-to-collision. GitHub repository (2023)
1991
-
[53]
& Chen, Y .-H
Huang, Y .-L. & Chen, Y .-H. Estimating intersections’ near-crash conflicts with the drone-based image-recording data.Traffic Saf. Res.9, e000084–e000084 (2025)
2025
-
[54]
arXiv preprint arXiv:2510.27333(2025)
Cheng, H.et al.Modified-emergency index (mei): A criticality metric for autonomous driving in lateral conflict. arXiv preprint arXiv:2510.27333(2025)
-
[55]
L., Shin, B
Allen, B. L., Shin, B. T. & Cooper, P. J. Analysis of traffic conflicts and collisions. Tech. Rep., Texas Transportation Institute (1978)
1978
-
[56]
& Hydén, C
Laureshyn, A., Svensson, Å. & Hydén, C. Evaluation of traffic safety, based on micro-level behavioural data: Theoretical framework and first implementation.Accid. Analysis & Prev.42, 1637–1646 (2010). 21/23
2010
-
[57]
Cheng, H.et al.Emergency index (ei): A two-dimensional surrogate safety measure considering vehicles’ interaction depth.Transp. Res. Part C: Emerg. Technol.171, 104981 (2025)
2025
-
[58]
C., van Cranenburgh, S
Jiao, Y ., Calvert, S. C., van Cranenburgh, S. & van Lint, H. Learning collision risk proactively from naturalistic driving data at scale.Nat. Mach. Intell.1–14 (2026)
2026
-
[59]
Polychronopoulos, A., Tsogas, M., Amditis, A. J. & Andreone, L. Sensor fusion for predicting vehicles’ path for collision avoidance systems.IEEE Transactions on Intell. Transp. Syst.8, 549–562 (2007)
2007
-
[60]
& Wanielik, G
Schubert, R., Richter, E. & Wanielik, G. Comparison and evaluation of advanced motion models for vehicle tracking. In2008 11th international conference on information fusion, 1–6 (IEEE, 2008)
2008
-
[61]
In2011 IEEE intelligent vehicles symposium (IV), 534–539 (IEEE, 2011)
Schubert, R.et al.Empirical evaluation of vehicular models for ego motion estimation. In2011 IEEE intelligent vehicles symposium (IV), 534–539 (IEEE, 2011)
2011
-
[62]
& Lee, S
Baek, M., Jeong, D., Choi, D. & Lee, S. Vehicle trajectory prediction and collision warning via fusion of multisensors and wireless vehicular communications.Sensors20, 288 (2020). 65.Brow, G. R. Traffic conflicts for road user safety studies.Can. J. Civ. Eng.21, 1–15 (1994)
2020
-
[63]
& Sayed, T
El-Basyouny, K. & Sayed, T. Safety performance functions using traffic conflicts.Saf. science51, 160–164 (2013)
2013
-
[64]
& Imprialou, M
Papadoulis, A., Quddus, M. & Imprialou, M. Evaluating the safety impact of connected and autonomous vehicles on motorways.Accid. Analysis & Prev.124, 12–22 (2019). 68.Sayed, T. & Zein, S. Traffic conflict standards for intersections.Transp. Plan. Technol.22, 309–323 (1999)
2019
-
[65]
& Zhao, J
Zhang, G., Chen, J. & Zhao, J. Safety performance evaluation of a three-leg unsignalized intersection using traffic conflict analysis.Math. problems engineering2017, 2948750 (2017)
2017
-
[66]
& Xing, L
Li, Y ., Li, Z., Wang, H., Wang, W. & Xing, L. Evaluating the safety impact of adaptive cruise control in traffic oscillations on freeways.Accid. Analysis & Prev.104, 137–145 (2017)
2017
-
[67]
Rahman, M. S. & Abdel-Aty, M. Longitudinal safety evaluation of connected vehicles’ platooning on express- ways.Accid. Analysis & Prev.117, 381–391 (2018)
2018
-
[68]
S., Abdel-Aty, M., Lee, J
Rahman, M. S., Abdel-Aty, M., Lee, J. & Rahman, M. H. Safety benefits of arterials’ crash risk under connected and automated vehicles.Transp. Res. Part C: Emerg. Technol.100, 354–371 (2019)
2019
-
[69]
& Liu, P
Wang, C., Xie, Y ., Huang, H. & Liu, P. A review of surrogate safety measures and their applications in connected and automated vehicles safety modeling.Accid. Analysis & Prev.157, 106157 (2021). Acknowledgements This work was supported by the National Natural Science Foundation of China (Grant Nos. 52572497 and 52572477), the National Key R&D Program of ...
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.